 ADAS高级驾驶辅助系统
ADAS高级驾驶辅助系统
ADAS是什么
ADAS(Advanced DriverAssistantSystem),高级驾驶辅助系统,通过感知、决策和执行帮助驾驶员觉察可能发生的危险,是提高安全性的主动安全技术,并普遍认为是实现自动驾驶AD 的过程性技术。
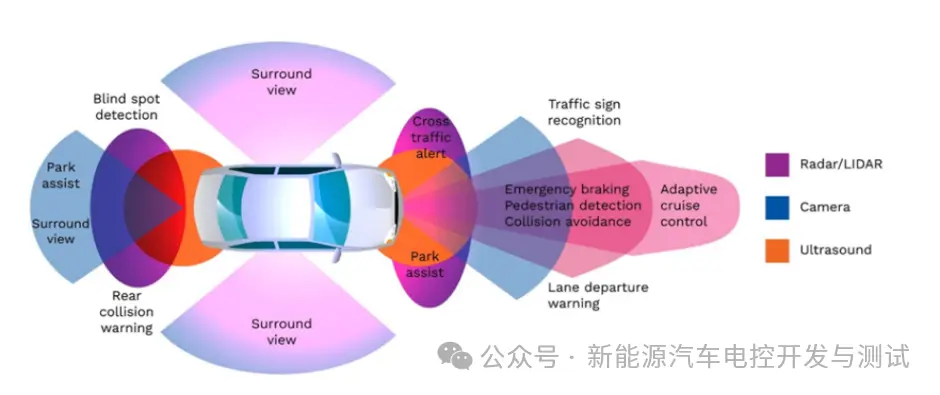
ADAS采用许多传感器来提高车辆安全性并提供广泛的自动驾驶功能,其中包括常用的四种传感器类型。首先是摄像头传感器,这种基于摄像头的解决方案成本较低,已成为ADAS最常见的传感器技术。另外是毫米波雷达传感器,会产生无线电波计算物体与波之间的距离,最典型的是作为防撞系统的一部分。第三种则是激光雷达传感器(LiDAR),使用激光来检测距离,也可以检测人员和地理异常情况。第四种则是超声波,主要用途是停车辅助和自动停车系统。
ADAS功能
ADAS驾驶辅助功能包括许多子功能,如下表
| 序号 | 简称 | 全称 | 中文注释 |
| 1 | ACC | Adaptive Cruise Control | 自适应巡航系统 |
| 2 | AEB | Automatic Emergency Braking | 自动紧急刹车系统 |
| 3 | FCW | Forward Collision Warning | 前向碰撞预警 |
| 4 | LDW | Lane Departure Warning | 车道偏离报警 |
| 5 | APS | AssistedParkingSystem | 泊车辅助系统 |
| 6 | LKA | Lane Keeping Assist | 车道保持辅助系统 |
| 7 | BSD | Blind Spot Detection | 盲点监测系统 |
| 8 | LCDA | Lane Change Decision Aid systems | 变道辅助决策系统 |
| 9 | FVCMS | Forward vehicle collision mitigation systems | 前向车辆碰撞缓冲系统 |
| 10 | CSWS | Curve speed warning systems | 曲线测速预警系统 |
| 11 | SAS | Speed Assist System | 速度辅助系统 |
ACC(AdaptiveCruiseControl),自适应巡航控制系统是一种智能化的自动控制系统,它是在早已存在的巡航控制技术的基础上发展而来的。
在车辆行驶过程中,安装在车辆前部的车距传感器(雷达)持续扫描车辆前方道路,轮速传感器采集车速信号。当与前车之间的距离过小时,ACC 控制单元可以通过与制动防抱死系统、发动机控制系统协调动作,使车轮适当制动,并使发动机的输出功率下降,以使车辆与前方车辆始终保持安全距离。自适应巡航控制系统在控制车辆制动时,通常会将制动减速度限制在不影响舒适的程度,当需要更大的减速度时,ACC 控制单元会发出信号通知驾驶者主动采取制动操作。当与前车之间的距离增加到安全距离时,ACC控制单元控制车辆按照设定的车速行驶。
AEB(AutonomousEmergencyBrakingSystem),自动紧急制动系统采用雷达测出与前车或者障碍物的距离,然后利用数据分析模块将测出的距离与警报距离、安全距离进行比较小于警报距离时就进行警报提示,而小于安全距离时即使在驾驶员没有来得及踩制动踏板的情况下,AEB 系统也会启动,使汽车自动制动,从而为安全出行保驾护航。主要由3大模块构成,包括控制模块(ECU),测距模块,和制动模块。其中测距块的核心包括微波雷达、人脸识别技术和视频系统等,它可以提供前方道路安全、准确、实时的图像和路况信息。
FCW(Forward Collision Warning),前方碰撞预警系统是通过雷达系统来时刻监测前方车辆,判断本车与前车之间的距离、方位及相对速度,当存在潜在碰撞危险时对驾驶者进行警告。CW系统并非自动驾驶的直接干预者,它仅提供预警信息,留给驾驶者自行判断和采取措施。其核心目标是增强驾驶者的感知,提升行车安全,而非代替人类的决策和操作。在行驶中,FCW系统如同一位隐形的助手,时刻守护着驾驶者的安全。通过智能化的预警系统,我们能够更安心地享受驾驶的乐趣,体验科技带来的便利与安心。
LDW(Lane DepartureWarningSystem),车道偏离报警系统通过视觉传感器(安装在前挡风玻璃中上部的摄像头)感知前方道路的车道线,并结合车辆当前行驶状态以及驾驶员意图来判断当前车辆是否已经发生无意识偏离,并在发生无意识偏离车道时提醒驾驶员。
LKA(Lane Keeping Assist),车道保持辅助系统,它通过摄像头等传感设备,精准感知并计算出车辆在车道中的具体位置及动态信息。该系统进一步利用车辆的转向与制动系统对车辆进行操控,旨在防止因车辆偏离车道而引发的交通事故。一旦检测到车辆有偏离车道的迹象,该系统会微调车辆的转向,确保其能够安全地返回原定车道继续行驶。LKA车道保持辅助系统的实现原理是通过使用传感器来检测车辆的位置和行驶方向,然后根据车道线的位置和车辆行驶情况来调整车辆的方向。
BSD(Blind Spot Detection System),盲点监测系统通过安装在汽车尾部保护杠位置的24GHz雷达传感器来检测盲区内存在的车辆,如果有车辆进入视野盲区,则会在后视镜位置有声光报警,提醒驾驶者这个时候变道存在危险。
APS(AssistedParkingSystem),泊车辅助系统可以使汽车自动地以正确的停靠位泊车该系统包括环境数据采集系统、中央处理器和车辆策略控制系统,其中环境数据采集系统包括图像采集系统和车载距离探测系统。其工作原理:通过车载传感器(超声波雷达或/和摄像头)采集图像数据及周围物体距车身的距离数据,通过数据线传输给中央处理器;中央处理器将采集到的数据分析处理后,得出汽车的当前位置、目标位置以及周围的环境参数,依据上述参数作出自动泊车策略,并将其转换成电信号;车辆策略控制系统接受电信号后,依据指令作出汽车的行驶如角度、方向及动力支援方面的操控。为驾驶员在泊车过程中提供横向或/和纵向辅助。
LCDA(Lane Change Decision Aid systems),变道辅助决策系统,也称盲区监测,能够通过雷达,以及安装的电子控制系统,在左右两个后视镜内或者其他地方(A柱下方的角灯)提醒驾驶者后方安全范围内有无障碍物或来车。从而消除视线盲区,提高行车安全,对初学驾驶者帮助很大。
LCDA功能:盲点检测(BSD)、变道辅助(LCA)、后向横穿预警、后向横穿辅助制动、开门预警(DOW)、正后向防撞预警(RCW)、前方横向碰撞预警、前向横穿辅助制动。
LCDA通常由2个后侧角雷达来实现并线辅助功能。但随着技术的不断精进,搭载4颗角雷达的车型越来越多,这样就不仅可以实现对后向进行并线辅助,碰撞预警/制动功能,前向也同样可以实现了。
FVCMS(Forward vehicle collision mitigation systems),前向车辆碰撞缓冲系统,是一种基于传感器技术的前车碰撞预警系统,通过车载摄像头、雷达或激光等传感器,实时监测前方障碍物的距离、速度和方向等信息,并根据算法进行分析和处理,预测前车的运动轨迹和可能出现的碰撞危险,向驾驶员发出警告,提醒其采取措施避免碰撞事故的发生。其通过检测前方障碍物,提醒驾驶员注意安全,避免前车碰撞事故的发生。而FVCMS系统的性能,主要由其曲线半径能力决定。
CSWS(Curve speed warning systems),曲线测速预警系统基于车辆自身的传感器、摄像头和数据处理单元,以及路况、GPS数据等信息,通过先进的算法分析和处理,识别车辆前方的道路曲率,并预测潜在的危险情况,提供驾驶员警告和提示。其主要原理包括车辆信息采集、数据处理和驾驶员警示三个关键部分。在车辆信息采集方面,弯道预警系统通过车辆上的传感器和摄像头实时监测车辆周围的环境和车辆本身的状态,如速度、加速度等。数据处理单元会对采集到的数据进行实时处理,并和路况、GPS数据等进行比对分析。一旦分析表明车辆行驶进入了一个曲线弯道并有潜在的危险,弯道预警系统将向驾驶员发出警示信号,可以是声音、光线或者震动等方式,提醒驾驶员有关潜在的危险情况。
SAS(Speed Assist System),速度辅助系统,旨在帮助驾驶员保持车辆的安全速度。通过车辆的传感器和摄像头来监测车辆的速度和道路限速信息并通过声光信息告知驾驶员,根据限速信息进行超速报警并能够主动干预控制速,使车速持在允许的高限内,此来降低危险。
来源:新能源汽车电控开发与测试
-
adas
+关注
关注
309文章
2183浏览量
208624 -
辅助系统
+关注
关注
0文章
64浏览量
11635 -
自动驾驶
+关注
关注
784文章
13784浏览量
166359 -
ADAS驾驶
+关注
关注
1文章
3浏览量
1621
发布评论请先 登录
相关推荐
MXIM推出GSML四通道解串器MAX9286,以更少元件、更短时间实现ADAS (高级驾驶辅助系统)的环视系统设计。
高速NOR闪存怎么配置FPGA
如何使用高速NOR闪存配置FPGA?
德州仪器RF CMOS雷达技术助推ADAS
东风雪铁龙ADAS高级驾驶辅助系统初体验
ADAS高级驾驶辅助系统的起缘及功能定义说明
ADAS高级驾驶辅助系统内有哪些系统?主要系统资料概述
无人驾驶时代来临之际 革新监管范式最为关键(附报告)
毫米波雷达需求旺盛,国内芯片企业如何寻求差异化之路?
浅谈ADAS高级驾驶辅助系统功能

行业资讯 | ADAS(高级驾驶辅助系统)产业全景调查,渗透率及普及率大大提升

GURC01超声波传感和信号处理器 替代E524.09 与(性能对比)

JAE汽车ADAS连接器产品介绍






 工商网监
工商网监
评论