 无人机飞行控制器的组成部件和工作原理
无人机飞行控制器的组成部件和工作原理

作者 | 穹宇逐光
出品 | 聚翼无人机
1第一部分
基础概念
飞控是什么?
多旋翼飞行控制器(Flight Controller, FC),是无人驾驶航空器(UAV)的核心组件之一。它充当无人机的“大脑”,负责处理来自各种传感器的数据,并据此作出决策,以实现对无人机的姿态控制、导航以及任务执行等功能。通过编程和算法优化,飞行控制器能够赋予无人机一定程度上的自主飞行能力,使其能够在没有人类直接干预的情况下完成特定任务。
组成部件
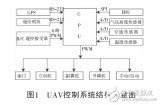
飞行控制器通常由以下几个关键部分构成:
● 传感器:包括GPS模块、惯性测量单元(IMU)、气压计等。这些设备用于感知无人机的位置、速度、高度及姿态等信息。
● 处理器:作为飞行控制器的大脑,处理器接收并处理来自各个传感器的数据,运行必要的控制算法,并输出控制指令给电机驱动器(ESC)和其他外设。
● 接口电路:提供与其他硬件组件连接的桥梁,例如接收机、电源管理模块、外部存储器等。
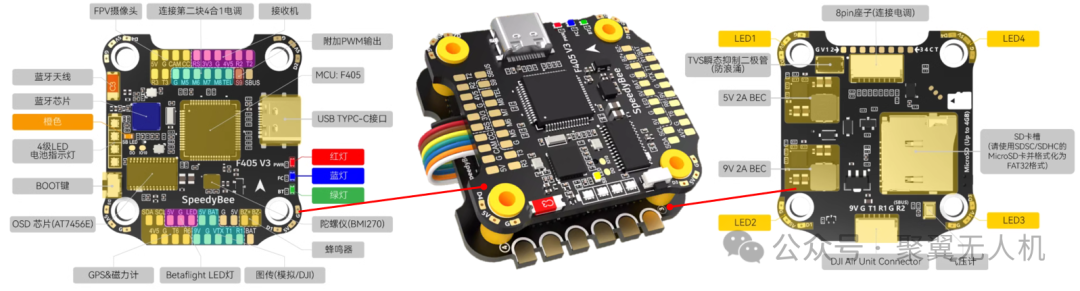
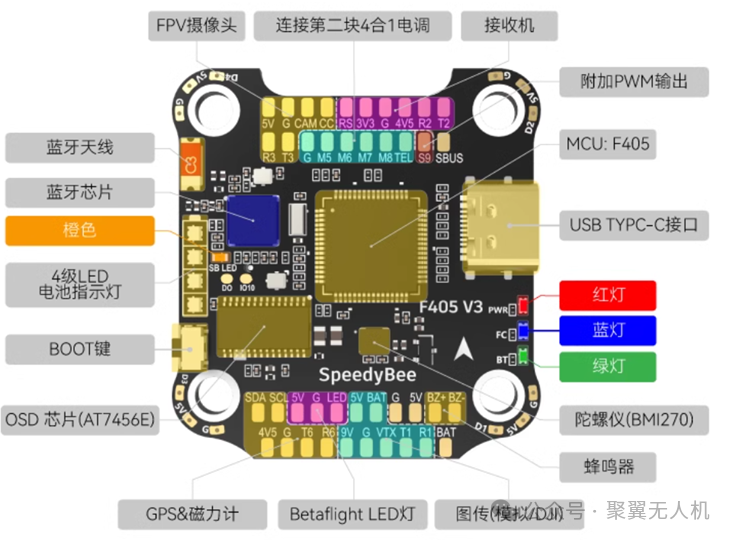
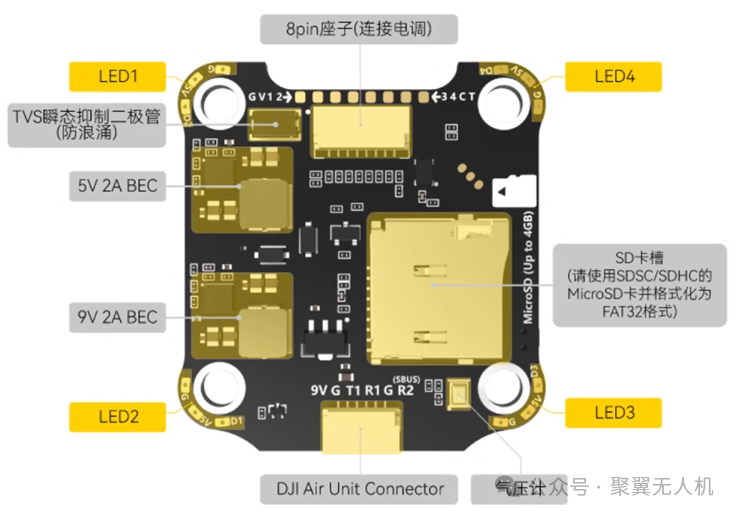
F405 V3飞控
各部分之间紧密协作,共同确保了飞行控制器能准确地获取环境信息,并根据预设规则或实时情况调整无人机的行为。
例如,IMU会持续监测机体运动状态,而GPS则为定位提供支持;处理器将这两者提供的数据结合,再运用适当的控制策略来保持稳定飞行或按计划航线行驶。
2第二部分
感知层面
在感知层面上,飞行控制器主要依赖于多种类型的传感器来捕捉周围环境的信息。
GPS可以提供精确的地理位置坐标,帮助确定无人机所处位置;IMU内的加速度计和陀螺仪可检测到机体的加速变化和旋转角度,从而判断其当前姿态;气压计用来估算海拔高度。为了提高数据质量和可靠性,飞行控制器还会采用数据融合技术,如卡尔曼滤波器(Kalman Filter),将不同来源的数据进行综合分析,消除噪声干扰,得到更准确的结果。此外,针对可能存在的误差问题,也会实施校正措施,比如温度补偿、零点漂移修正等。
控制层面
一旦获得了足够可靠的状态信息,接下来就是如何有效地利用这些信息来进行控制了。
这一步骤涉及到选择合适的控制算法,其中最常见的是PID(比例-积分-微分)控制器和LQR(线性二次型调节器)。PID控制器基于误差反馈机制,通过对误差的比例、积分和微分三个分量加权求和,产生一个适当的控制信号,使系统输出尽可能接近期望值。相比之下,LQR则更加复杂,它考虑到了系统的动态特性,在最小化性能指标的同时,寻求最优解。无论采用哪种方法,最终目的都是让无人机按照预定的方式行动,无论是悬停不动还是沿着指定路径前进。
决策层面
对于高级应用而言,仅仅做到精准控制还不够,还需要具备良好的任务规划能力和应对突发状况的能力。
这意味着飞行控制器需要有能力规划出合理的飞行路线,并且在遇到障碍物或者失去通信联系时采取适当的安全措施。例如,在执行摄影任务时,它可以计算出最佳拍摄角度和时机;当发现电池电量不足时,则自动返回起降点降落。同时,为了保证安全性,还应该设置一系列应急预案,如一键返航、自动避障等。
3第三部分
软件平台
开源项目
随着开源文化的兴起,越来越多的人参与到飞行控制器的研究和发展中来。
一些知名的开源飞行控制器项目包括:
● ArduPilot:适用于固定翼、直升机、多旋翼等多种类型无人机的开源飞控系统。它具有强大的功能集和活跃的社区支持。
● PX4:另一个广泛使用的开源飞控平台,专注于高性能和高可靠性。它的代码库维护良好,文档详尽,适合学术研究和技术开发。
● Betaflight:主要用于竞速类FPV(第一人称视角)无人机的飞控固件,强调快速响应和灵活配置。
尽管上述项目各有特色,但它们都致力于降低进入门槛,鼓励更多爱好者加入到无人机技术的创新实践中去。
如果对开源项目的内容感兴趣的话,记得在评论区告诉我们哦,直接安排走起!
-
无人机
+关注
关注
237文章
11430浏览量
197083 -
航空器
+关注
关注
0文章
111浏览量
10503 -
无人驾驶
+关注
关注
100文章
4315浏览量
127258 -
飞行控制器
+关注
关注
1文章
28浏览量
10631
原文标题:无人机的飞行控制器是什么?
文章出处:【微信号:芯长征科技,微信公众号:芯长征科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录




评论