 如何快速调整步进电机
如何快速调整步进电机
步进电机,作为一种将电脉冲信号转换为角位移或线位移的开环控制元件,在自动化控制系统中扮演着举足轻重的角色。其控制简单、定位精度高、无累积误差等特点,使其在机器人、数控机床、自动化生产线等领域广泛应用。然而,在实际应用中,如何快速而准确地调整步进电机,以确保其性能最优化,往往是工程师和技术人员面临的挑战之一。本文将详细探讨如何快速调整步进电机,从基本原理到实际操作步骤,再到常见问题及解决方案,旨在为读者提供一套全面而实用的指南。
一、步进电机基本原理与选型
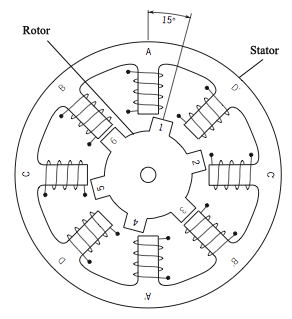
步进电机的工作原理基于电磁学原理,通过控制绕组中电流的通断顺序,产生磁场的变化,进而驱动转子逐步旋转。常见的步进电机有永磁式(PM)、反应式(VR)和混合式(HB)三种类型,其中混合式步进电机因综合性能优越而应用最广。
选型考虑:
1. 负载特性:根据所需承受的负载大小、转动惯量及动态性能要求选择合适的步进电机型号。
2. 控制精度:根据系统对定位精度和步距角的要求,选择合适的步进角(如1.8°、0.9°等)。
3. 速度范围:根据系统对转速的要求,选择能够提供足够扭矩和速度的步进电机。
4. 工作环境:考虑电机的温度范围、防护等级等因素,确保电机能在特定环境下稳定运行。
二、驱动器的选择与设置
步进电机驱动器是连接控制器与步进电机之间的桥梁,负责将控制信号转换为电机可识别的电流信号。选择合适的驱动器对于步进电机的性能至关重要。
驱动器选型:
电流匹配:驱动器输出电流应与步进电机的额定电流相匹配,过大可能导致过热,过小则影响扭矩输出。
微步控制:现代驱动器普遍支持微步控制(如16细分、256细分等),可以提高电机的运动平滑度和定位精度。
保护功能:选择具有过流、过热、短路等保护功能的驱动器,提高系统的稳定性和安全性。
驱动器设置:
1. 细分设置:根据实际需要调整微步细分,以达到所需的运动精度和平滑度。
2. 电流限制:通过驱动器上的拨码开关或软件设置,调整输出电流至电机额定电流附近,确保最佳扭矩输出。
3. 方向控制:正确连接方向控制信号线,确保电机能够按预期方向旋转。
三、快速调整步骤
1. 硬件连接与初步测试
连接电机与驱动器:按照驱动器说明书,正确连接步进电机的各相线。
连接电源与控制器:确保驱动器供电正常,控制器与驱动器之间的信号线连接无误。
软件配置:在控制器软件中设置步进电机的类型、步距角、细分等参数。
初步测试:发送简单的步进信号,观察电机是否能按预期旋转,记录任何异常情况。
2. 精细调整与优化
速度优化:逐步提高电机运行速度,观察是否有失步或过热现象,调整驱动器参数以达到最佳速度。
加速度设置:合理设置电机的加速度,避免启动或停止时的冲击,提高运动平稳性。
负载测试:在接近实际工作负载的条件下测试电机性能,必要时调整电流限制或选用更大功率的电机。
振动与噪音控制:通过调整细分、优化机械结构等方式,减少电机运行时的振动和噪音。
3. 常见问题及解决方案
失步问题:可能是由于负载过大、电流设置不当或控制器输出能力不足引起。检查并调整相应参数。
过热保护:通常由于电流设置过高或散热不良导致。降低电流设置,改善散热条件。
噪音大:可能是由于机械摩擦、轴承损坏或电磁干扰引起。检查机械部件,优化电磁设计。
定位精度不足:通过增加细分、校准控制器输出或优化控制算法提高定位精度。
四、高级应用与拓展
闭环控制系统:对于更高精度的应用,可以考虑引入编码器或光栅尺等反馈装置,构建闭环控制系统,进一步提高定位精度和稳定性。
运动控制算法:学习和应用先进的运动控制算法,如PID控制、轨迹规划等,可以显著提升步进电机的动态性能和定位精度。
网络通信与远程监控:通过以太网、CAN总线等通信协议,实现步进电机的远程监控和控制,便于系统集成和远程维护。
五、结论
快速调整步进电机是一个涉及硬件连接、参数配置、性能优化等多个方面的综合过程。通过深入理解步进电机的基本原理,合理选择驱动器并正确设置参数,结合精细的调整步骤和常见问题解决方案,可以显著提升步进电机的运行效率和性能。随着技术的不断进步,步进电机的应用领域将更加广泛,对调整技术的要求也将更加严格。因此,持续学习和掌握最新的调整方法和工具,对于技术人员来说至关重要。希望本文能够为读者提供有益的参考和指导,助力步进电机应用的快速发展和创新。
审核编辑 黄宇
-
步进电机
+关注
关注
150文章
3112浏览量
147536
发布评论请先 登录
相关推荐
行星减速步进电机与步进电机的区别

步进电机如何自适应控制?步进电机如何细分驱动控制?
步进电机的伺服控制方法有哪些

什么是步进电机?步进电机的类型和结构
调速电机的速度调整范围有哪些
如何调整二相步进电机的步进角度,控制步进角度的功能?





 工商网监
工商网监
评论