 自主移动机器人设计指南
自主移动机器人设计指南
自主移动机器人(AMR)是一种复杂的系统,与自动驾驶汽车有许多共同之处--它们需要感知、电机驱动、电源转换、照明和电池管理。也许最大的挑战是将这些子系统整合到一个最终产品中--由于需要集成来自不同供应商的不同子系统,这一挑战变得更加困难。
本文将探讨AMR的复杂世界,并考虑选择由一家解决方案提供商来负责AMR所有关键方面的设计——其优势包括降低设计/集成风险和缩短上市时间。
自动导引车(AGV)主要在室内运行,并按照预先确定的路线行驶(通常使用地面上的线条作为引导),自主移动机器人(AMR)则要复杂得多,能够在室内和室外自由导航,而不必遵循预定义的路线。在这方面,它们类似于自动驾驶车辆,因为它们必须识别并避开路径上的障碍物,无论障碍物是静止的还是移动的。
几乎所有AMR的核心都是五个主要子系统,分别管理电源、运动、感知、处理和照明。每个子系统本身都很复杂,设计起来往往具有挑战性,同时也是AMR成功运行的基础。然而,集成往往是最大的挑战--尤其是从不同供应商处采购子系统或主要部件时。
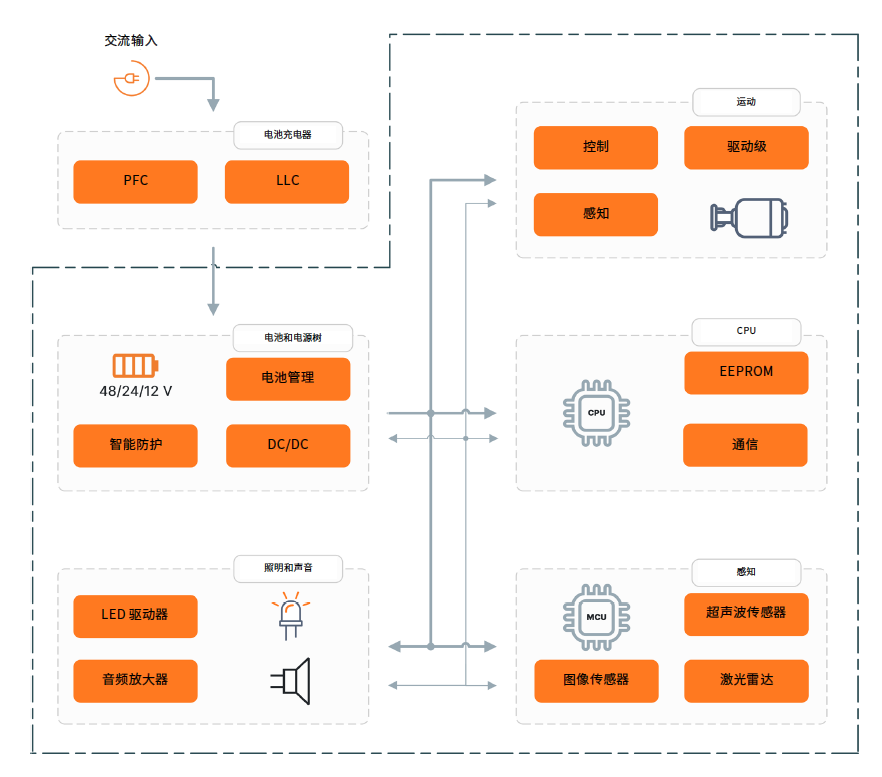
图1- 典型AMR的关键子系统
要使AMR正常运行,子系统之间的信息流和功率流至关重要,这意味着要有一个通用的接口和经过测试可协同工作的部件,以消除兼容性问题。简单来说,从一个解决方案供应商处采购关键系统元件有助于降低开发风险,缩短上市时间,并在竞争激烈的市场中保持领先地位。
构建系统集成的AMR
感知对于在自由空间中导航的自主移动机器人(AMR)至关重要,尤其是在没有轨道或其他导航辅助设备可用的情况下。AMR必须能够找到安全的路线,并处理路径上的静态和移动障碍物。为了克服天气或照明条件的限制,并适应不同的距离,会使用包括图像传感器、超声波和激光雷达(LiDAR)在内的多种技术。来自多个传感器的数据会被整合,以便更好地了解周围环境。这种技术被称为传感器融合,它提供了更好的可靠性、冗余性和安全性。
安森美(onsemi)一直是智能感知技术的领导者。安森美提供从VGA到4500万像素的各种卷帘曝光和全局曝光图像传感器。这些传感器在动态范围方面具有业界先进的性能,并具备如运动唤醒和自动曝光控制等创新特性。除图像传感器之外,安森美还提供用于测距(LiDAR)的硅光电倍增管(SiPM)、超声波传感器、电感式传感器以及支持到达角(AoA)和出发角(AoD)的Bluetooth低功耗(BLE)技术微控制器,这些可以用于定位。
运动控制在 AMR中非常重要。通常使用无刷直流(BLDC)电机,需要复杂的算法进行精确控制。无刷直流电机驱动级需要许多元器件来正确控制。NCD83591三相栅极驱动器通过开启和关闭功率开关来控制换相,非常适合用于电机控制子系统。
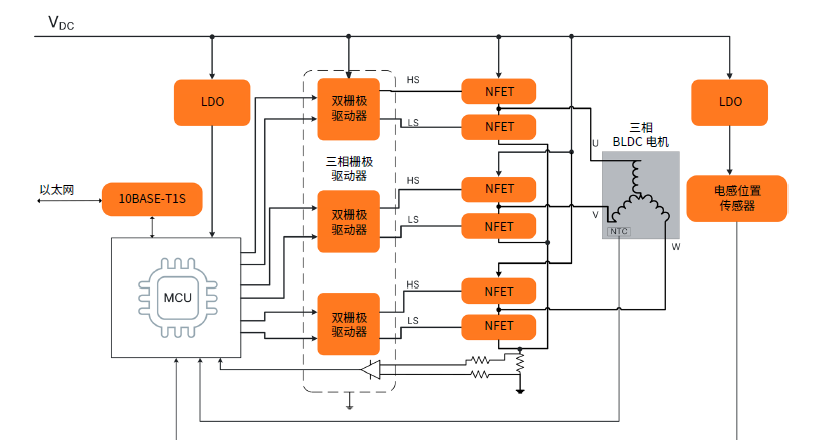
图2- 驱动BLDC电机需要多个元器件协同工作
MOSFET用作开关为电机绕组供电。安森美提供了一系列中压(MV)MOSFET 产品组合,包括最新的PowerTrench T10 MOSFET,是电机应用的理想之选。MOSFET还可用于AMR内的一般功率应用。
图3- PowerTrenchT10 MOSFET 的优势
与硅MOSFET相比,碳化硅(SiC)MOSFET 具有更高的热导率和十倍的击穿电场强度。这使得碳化硅元件能够在相同材料厚度下承受更高的电压。当 AMR(例如自动叉车)变得越来越大时,电池电压也会随之升高,而基于SiC的系统则可提供更好的性能和更高的效率。
SiCMOSFET 的另一个优势是能够在更高温度下工作,从而简化了散热器设计。更高的工作频率可减小磁性元件的尺寸(和成本),从而缩小子系统的尺寸,有助于扩大AMR的工作范围。
电力输送不仅对电机控制至关重要。系统还需要一个外部充电器,该充电器需要尽可能快且高效地为电池充电。AMR中的DC-DC电源树使用开关模式电源(SMPS)和线性稳压器(LDO)来供应逻辑和低压电平。效率固然重要,但在整个电源架构中部署适当的保护措施也同样重要。安森美提供了一系列适用于AMR应用的电子保险丝(eFuse)和SmartFET解决方案。
通信对AMR至关重要,既包括AMR本身内部的通信,也包括与配套设施的外部通信,还可能包括与其他AMR的通信。为 AMR选择通信技术时需要考虑的参数包括其工作范围、数据传输速率、功耗和安全性。在内部通信方面,长期以来使用了许多协议,包括CAN、LIN、RS-485和RS232。以太网 10BASE-T1S(如安森美的NCN26010)集简便性和高性能于一身,因此越来越受欢迎。它提供通过单根非屏蔽双绞线收发数据所需的所有物理层功能。与主控 MCU的通信通过OPEN联盟MAC-PHY串行外设接口(SPI)协议进行。
无论是发送路由或配置信息以及报告位置和进度,还是用于实时定位服务(RTLS),外部通信对于AMR来说也是必不可少的。安森美基于BluetoothLE 5.2 无线MCU的RSL15超低功耗ArmCortex-M33 处理器是利用到达角(AoA)和出发角(AoD)功能实现实时定位系统(RTLS)的理想选择,它还可用于连接智能设备。RSL15内置电源管理、宽电源电压范围、灵活的GPIO和时钟电路以及丰富的外设,为AMR设计人员提供了最大的设计灵活性。
照明子系统用于向周围的人员和其他AMR传达AMR的状态、状况和意图。选择AMR照明技术时需要考虑的性能特性和参数包括亮度、色温和功耗。LED控制器和驱动器监控流经LED的电流,并使LED发出特定强度和波长的光。LED驱动电路使用高压侧和低压侧功率MOSFET来导通和关断LED电流,同时防止过压和过流情况,并确保LED驱动电路的稳定性。
对AMR解决方案的支持
选择一家解决方案提供商可能是一个有风险的决定,但他们拥有一套全面的产品解决方案。同样重要的是在整个设计过程中提供的支持,以及在需要的时间和地点提供产品的能力。
作为一家拥有丰富行业经验的老牌供应商,安森美能够提供系统级应用支持。我们的全球销售和技术团队网络可以不受地区、时区和语言的限制,提供一线支持。
除了现场支持,用户还可以访问我们的在线技术支持中心。安森美社区论坛是一个在线开发者社区,在这里,安森美产品的资深用户可以分享他们关于产品和应用的丰富知识。用户可以通过一些特定主题的产品论坛区域访问该论坛,与业内同行互动,提出或回答问题。帮助库也是了解常见问题 (FAQ)和答案的好地方。对于喜欢更多互动的用户,由AI驱动的聊天机器人可以在几秒钟内为您提供答案。
安森美提供了一系列广泛的免费自助服务工具,包括交互式框图、ProductRecommendation Tools+TM产品推荐工具和大量评估板/套件,以促进快速原型开发。电力电子设计人员会发现这些仿真工具非常有用。ElitePower Simulator仿真工具和自助式 PLECS模型生成工具不仅可以通过对实际元器件性能建模以提高准确性,还能加快产品上市时间。
当然,上述一切只有在产品设计完成并投入生产后才有价值。安森美具备内外部双重制造能力,这增加了供应链的韧性并提升了供应保障。
结语
AMR是一种高效、可靠的运送包裹和执行其他物流任务的方式,因此越来越受欢迎。然而,完全自主行驶需要高度的复杂性和安全性,这一点与汽车并无二致。
也许最大的设计挑战不在于AMR中的各种子系统,而在于这些子系统的集成,特别是如果这些子系统来自不同的供应商,其兼容性很可能是一个挑战。
作为一家解决方案供应商,安森美的独特之处在于可以为AMR的设计提供一整套极其先进的产品,以及完善的支持生态系统,包括支持人员、工具、文档、在线论坛等,并以垂直整合的弹性制造能力为后盾。
-
MOSFET
+关注
关注
147文章
7311浏览量
214793 -
自动驾驶
+关注
关注
785文章
13969浏览量
167404 -
自主移动机器人
+关注
关注
2文章
44浏览量
11625
原文标题:自主移动机器人设计指南,看完秒懂
文章出处:【微信号:onsemi-china,微信公众号:安森美】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论