 如何实现自动驾驶规控算法的仿真验证
如何实现自动驾驶规控算法的仿真验证

随着自动驾驶技术的不断进步,市场需求的持续增长,自动驾驶产业迎来广阔的发展前景。L3及以上级别的自动驾驶技术有望逐步落地普及,为人们带来更加安全、便捷、高效的出行体验。
在自动驾驶技术落地之前,如何高效的进行自动驾驶算法开发与验证,是企业迫切需要解决的问题。同时规控算法作为自动驾驶算法的核心,其功能的好坏直接影响着乘客的安全性与舒适性,对规控算法的验证显得尤为重要。
自动驾驶规控算法验证需求
自动驾驶算法可分为感知、规划、决策、控制执行四大模块。规划控制功能作为自动驾驶算法的核心,其主要目标为:
从起点到终点规划全局行驶路线,并在车辆行驶过程中,基于周围环境,对局部轨迹进行实时规划
精准控制自车按目标轨迹行驶
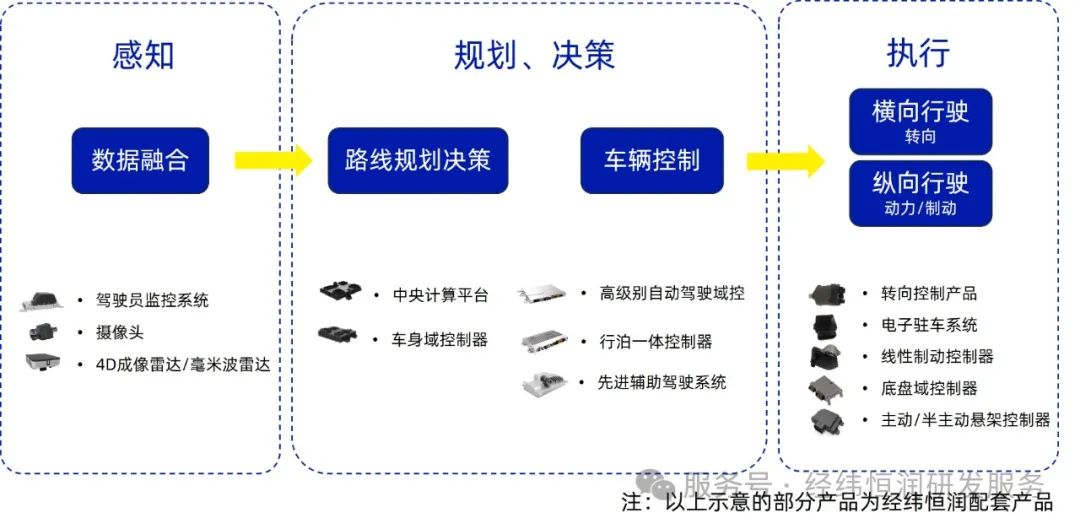
图1 自动驾驶算法流程
自动驾驶规控算法通过接收传感融合信息,避开障碍物,结合约束条件,规划出两点间一条最优的路径;然后由控制算法对自车的行驶轨迹进行控制,从而实现车辆的自动行驶。
车辆轨迹的规划控制是一个非常复杂的问题,一方面要考虑车辆自身的状态,另一方面还需要在行车过程中,考虑与其他车辆的博弈问题。通过获取交通车的速度、加速度、横摆角速度信息,预测交通车轨迹,实时调整自车的轨迹,保障自车行车的安全性与舒适性。
一个好的规控算法,需要反复验证与迭代,才能给乘客提供更舒适、更安全的乘车体验。行业公认的测试验证方法主要有两种,一种是实车验证,这种验证方案准确性较高,不过受限于路测条件,效率偏低且成本较高。另一种是仿真验证,通过构建一个虚拟仿真环境,利用数字化手段进行验证。仿真验证由于其效率高、成本低,在自动驾驶行业获得普遍认可,其价值主要体现在以下几个方面:
可通过仿真环境构建大量极端场景,提高测试场景价值
可提供一个安全的验证环境,降低犯错成本
可随机生成交通流,模拟复杂的交通车行为,验证L3+自动驾驶算法
可通过仿真环境,重现功能失效场景,定位功能失效原因,实现算法优化
可通过泛化大量场景,充分验证算法的可靠性
场景仿真软件介绍
实现规控算法的仿真验证,需要一套完整的闭环解决方案,经纬恒润通过多年在仿真测试行业内的积累,推出了成熟的SIL、HIL测试解决方案,在方案中采用经纬恒润自主研发的自动驾驶场景仿真软件ModelBase-AD来满足规控算法的闭环验证需求。
ModelBase-AD软件将自动驾驶算法仿真验证需要的传感器、道路、天气、交通流、车辆动力学模型整合为一体,更便捷地进行自动驾驶算法的验证。
图2 ModelBase-AD 软件主要功能
规控算法主要基于道路、交通规则和交通障碍物信息的输入,规划自车行驶轨迹,并实时采集自车状态,输出控制指令,保证自车按期望轨迹行驶。
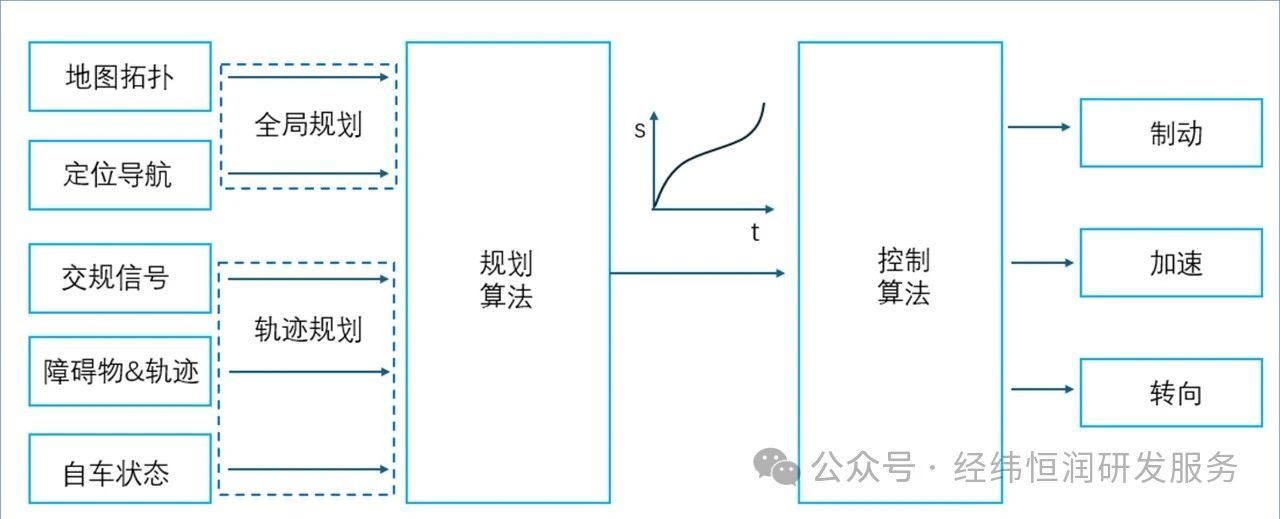
图3 规划控制算法接口信息
下面将从静态场景模型、随机交通流模型、车辆动力模型三个方面,详细介绍ModelBase-AD是如何模拟算法的需求信息,并响应算法的指令,实现车辆准确行驶的。
静态场景模型
ModelBase-AD静态场景模型主要包括道路模型和交通资产模型两大组成部分。道路模型基于OpenDRIVE标准开发,软件内置了十多套道路模板,涵盖城市路、乡村路、高速路、双车道、四车道、六车道、八车道等不同类型,用户可以利用内置的道路模板快,快速创建道路,实现复杂路网构建。道路模型可覆盖交叉路口、立交桥、桥梁、隧道、环岛、坡道、闸道、收费站、停车场等道路元素。道路模型的路面摩擦系数可根据雨雪天气自动适配,可以准确的模拟车辆在雨雪天气下的行驶状态。
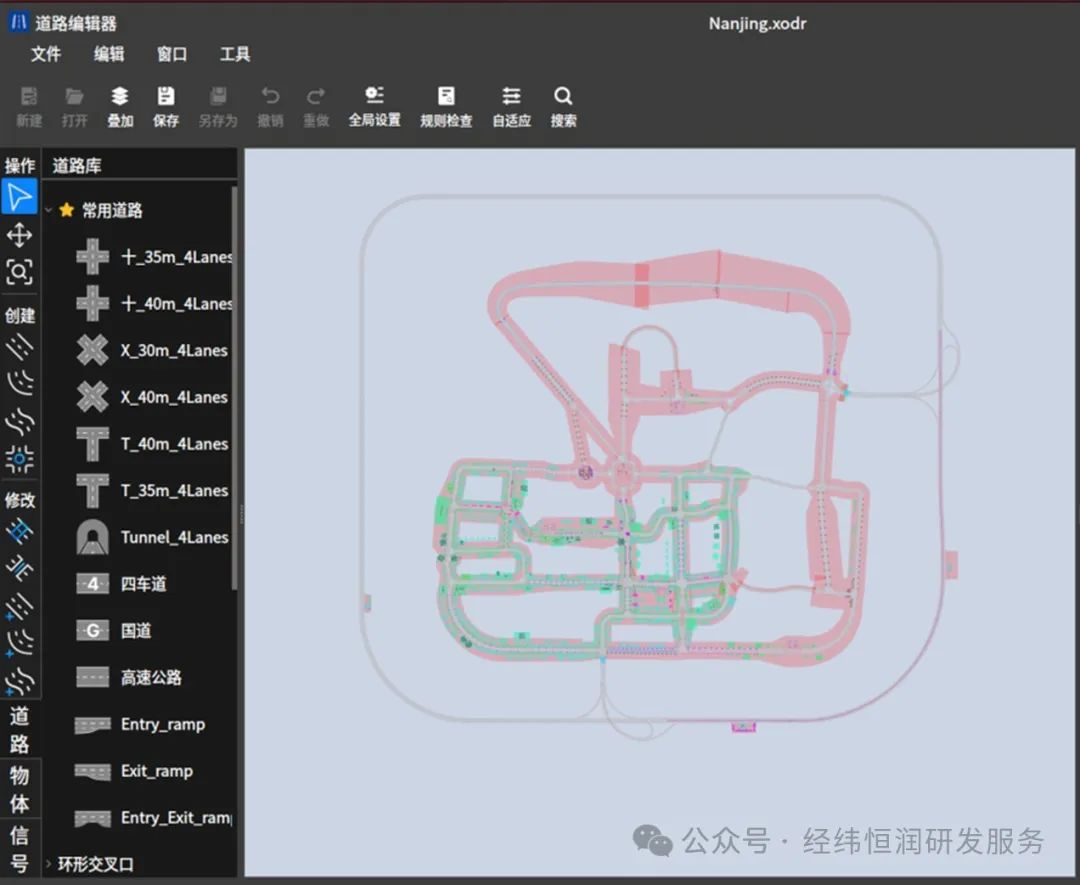
图4 道路模型配置界面

图5 整体静态场景渲染效果

图6 下雨路面效果
ModelBase-AD静态场景模型内置了大量的交通资产模型,包括路政设施、导流线、高速出入口标识牌、交通灯、路灯、护栏、停车位、限速牌、路口提示牌、高速服务区提示牌等。可基于用户对交通标识的仿真需求,直接部署应用,无需二次开发。
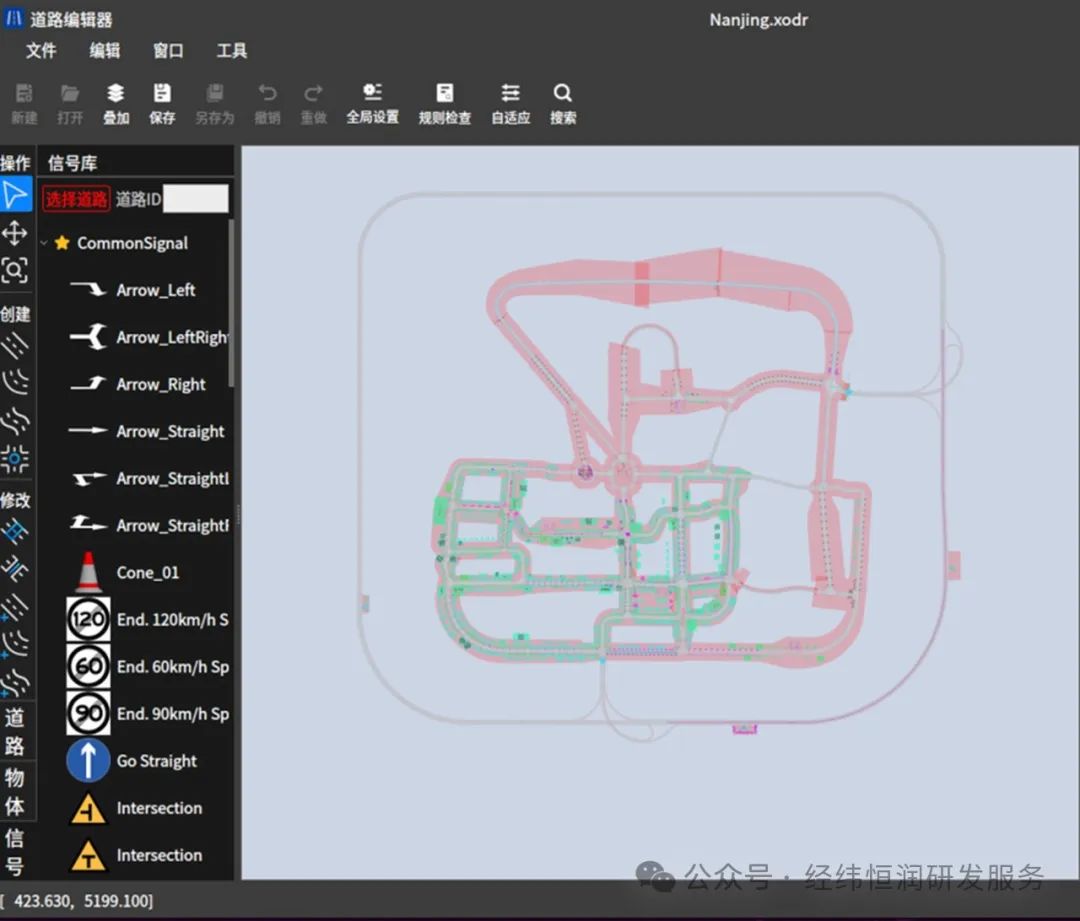
图7 交通资产配置界面
图8 交通资产模型展示
利用场景软件中的道路模型库和交通元素库,可实现任意道路场景的搭建,充分覆盖自动驾驶规控算法对静态场景的需求。
随机交通流模型
交通车辆的轨迹和驾驶风格均影响着自动驾驶算法的实时轨迹规划,准确模拟出交通车的轨迹和驾驶风格是规划算法测试的核心需求。
为了将每辆交通车的行驶轨迹模拟准确,ModelBase-AD采用 6自由度车身动力学模型来定义每一辆交通车,同时考虑了路面摩擦系数对交通车运动的影响,可准确模拟出晴天、雨雪天气下,交通车的行驶轨迹。
为了更有效地覆盖交通车的驾驶风格,ModelBase-AD定制了一套随机交通流算法模型,将驾驶风格细分为5种类型,分别为新手型、保守型、普通型、激进型、冒险型。模型参数包括加速度、速度、道距离、换道时间、反应时间、预瞄距离、视野距离、超车渴望度、是否遵守交通规则等。

图9 随机驾驶员参数配置
激进型驾驶员风格
保守型驾驶员风格
ModelBase-AD通过随机交通流算法、6自由度动力学模型、准确的道路附着系数,将场景软件中交通车的行驶轨迹进行了准确描述,从而更准确的实现了L3+自动驾驶规控算法验证。
整车动力学模型
在规控算法模块中,规划算法输出目标轨迹给控制算法,控制算法基于自车当前状态,实时解算出执行器控制目标,并由执行器驱动车辆行驶到目标位置。在算法验证过程中,整车动力学模型能否准确表征真实车辆的姿态和行驶轨迹,是算法能否得到准确验证的核心影响因素。
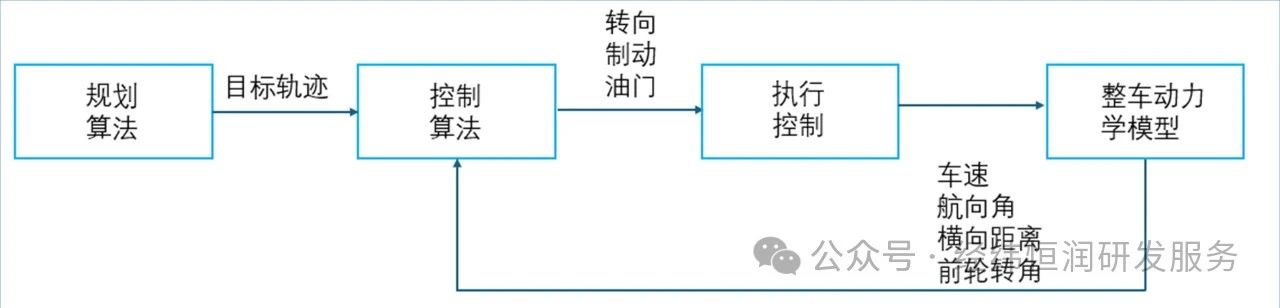
图10 控制算法执行流程
为了保证整车动力学模型能够准确表征实车的轨迹和姿态。ModelBase-AD软件开发了30+自由度的整车动力学模型。除6自由度车身模型外,还包括动力系统模型、转向系统模型、制动系统模型、悬架系统模型、轮胎系统模型。所有模型,均提供参数化接口,用户可填入实车参数,定义自己的专属车辆模型。

图11 车辆参数化界面
ModelBase-AD软件还定义了一套标准的高精模型开发流程,采集标准工况下的实车数据,训练模型的输出结果,从而生成高精车辆动力学模型。

图12 高精动力学模型生成流程
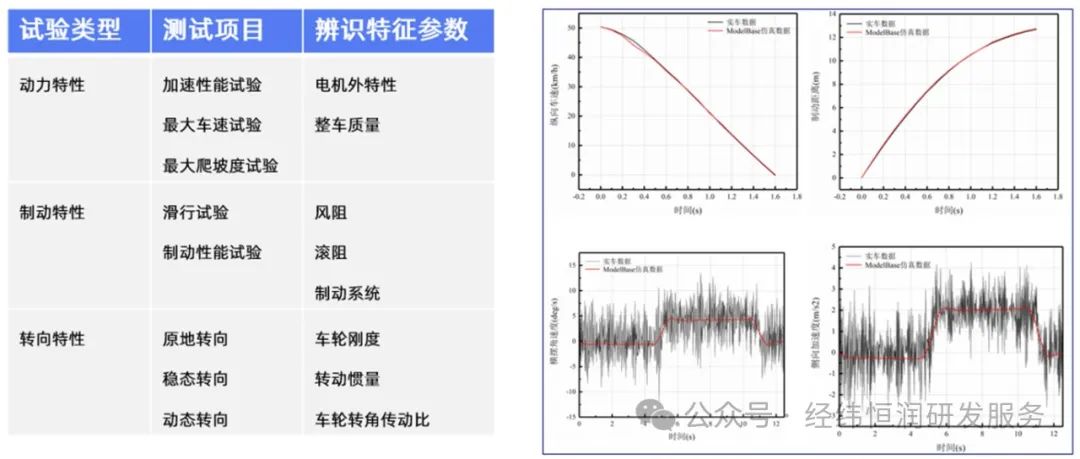
图13 高精模型校准效果展示
ModelBase-AD通过高精车辆动力学模型模拟自车的轨迹和姿态,准确表征自车的行驶状态,保障规控算法验证更准确。
总结
随着自动驾驶电控技术的发展,传统的规控算法正向着端到端大模型发展。虽然算法的内核发生了变化,但算法的验证需求不变,算法的输入、输出接口不变。ModelBase-AD凭借其优秀的静态场景模型、随机交通流模型、整车动力学模型,为各大主机厂和供应商提供了准确的自动驾驶规控算法验证仿真环境,提升了自动驾驶规控算法验证效率。
-
仿真软件
+关注
关注
21文章
287浏览量
32017 -
算法验证
+关注
关注
0文章
2浏览量
4937 -
自动驾驶
+关注
关注
795文章
15047浏览量
181945
原文标题:自动驾驶规控算法验证到底需要什么样的场景仿真软件?
文章出处:【微信号:经纬恒润研发服务,微信公众号:经纬恒润研发服务】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
FPGA在自动驾驶领域有哪些应用?
FPGA在自动驾驶领域有哪些优势?
谷歌的自动驾驶汽车是酱紫实现的吗?
自动驾驶真的会来吗?
自动驾驶的到来
即插即用的自动驾驶LiDAR感知算法盒子 RS-Box
如何让自动驾驶更加安全?
智能感知方案怎么帮助实现安全的自动驾驶?
自动驾驶汽车的处理能力怎么样?
自动驾驶系统设计及应用的相关资料分享
自动驾驶技术的实现
用于自动驾驶感知开发的仿真方案
深度学习算法在自动驾驶规控中的应用解读
自动驾驶规控算法验证到底需要什么样的场景仿真软件?




评论