西门子的PID控制算法-FB(功能块)封装主要应用于工业自动化和过程控制系统中,用于实现闭环控制。具体来说,它广泛应用于需要维持某一设定值的过程变量,如温度、压力、流量、速度等的精确控制。
01主要应用场合
制造业:在制造过程中,许多参数如温度、湿度、压力等都需要被严格控制以确保产品质量。例如,在食品加工、化工生产、制药等行业中,PID控制可以用来保持反应釜内的温度稳定。能源管理:在电力、燃气等能源供应系统中,通过PID控制可以有效地调节发电机组的输出功率或供气系统的压力,以响应需求变化并减少能源浪费。暖通空调(HVAC):楼宇自动化的温控系统中,PID控制器能够根据室内温度传感器反馈的信息调整加热器或冷却器的工作状态,从而达到节能的目的。水处理:污水处理厂利用PID控制来监控和调整各种水质参数,如pH值、溶解氧浓度等,确保排放标准达标。机器人技术:在机械臂的位置控制或者移动机器人的速度控制上,PID控制同样扮演着重要角色。
02意义
提高精度:相较于开环控制系统,PID控制能够更准确地跟踪设定点,减少误差。
增强稳定性:通过对比例、积分、微分三个参数的适当调整,可以使控制系统更加稳定,避免过调或震荡现象。
适应性强:即使面对负载变动或外部干扰,良好的PID调节也能保证系统快速恢复到期望的工作状态。
简化编程与维护:使用预封装的功能块进行开发,可以大大缩短编程时间,并且由于其模块化特性,便于后期维护和调试。
综上所述,西门子提供的PID控制算法-FB块封装为工程师提供了一种高效、可靠的方法来构建复杂的自动化控制系统,对于提升生产效率和产品质量有着重要意义。
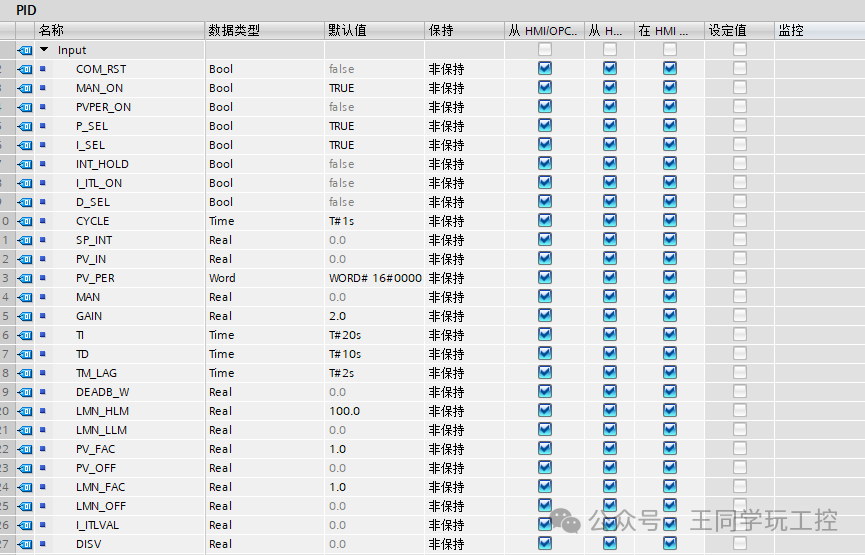
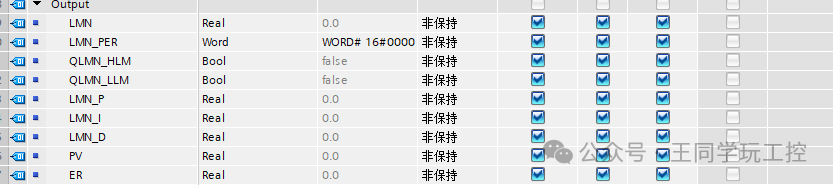
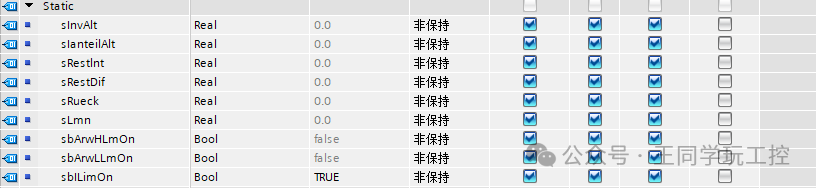
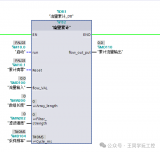
03FB块
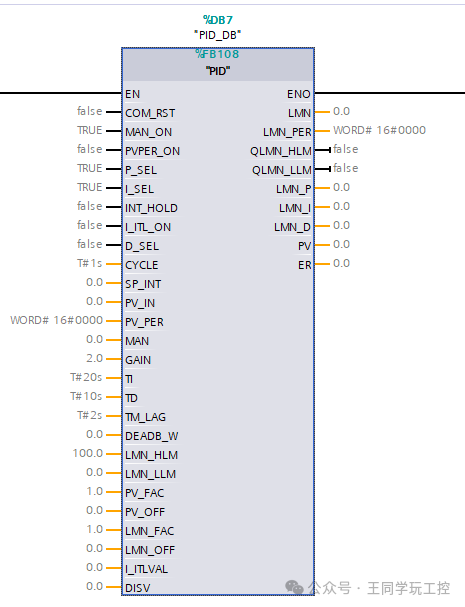
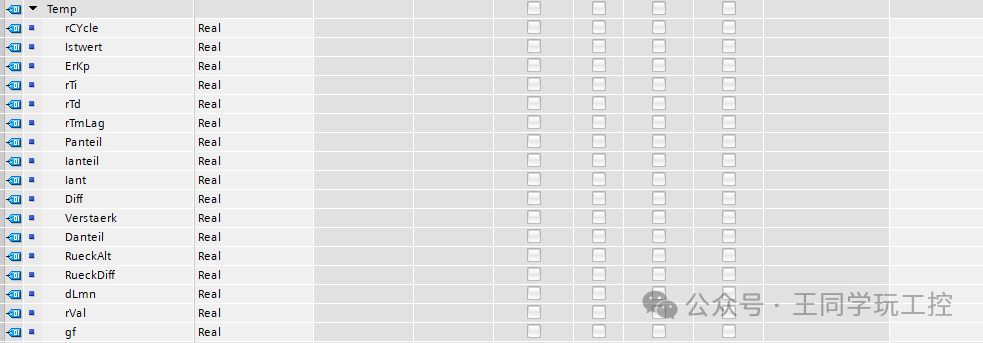
IF #COM_
RST THEN //PID初始化
#sIan
teilAlt := #I_ITLVAL;
#LMN := 0.0;
#QLMN_HLM := FALSE;
#QLMN_LLM := FALSE;
#LMN_P := 0.0;
#LMN_I := 0.0;
#LMN_D := 0.0;
#LMN_PER := W#16#0;
#PV := 0.0;
#ER := 0.0;
#sInvAlt := 0.0;
#sRestlnt := 0.0;
#sRestDif := 0.0;
#sRueck := 0.0;
#sLmn := 0.0;
#sbArwHLmOn := FALSE;
#sbArwLLmOn := FALSE;
ELSE
#rCYcle := DINT_TO_REAL(
TIME_TO_DINT(#CYCLE)) / 1000.0; //采样时间转换为浮点数值
#Istwert:=DINT_TO_REAL(INT_TO_DINT(W
ORD_TO_INT(#PV_PER)))*0.003616898;
#Istwert := #Istwert * #PV_FAC + #PV_OFF; //外设输入转换为浮点数值
IF NOT #PVPER_ON THEN //过程变量选择
#Istwert := #PV_IN;
END_IF;
#PV := #Istwert;
#ErKp := #SP_INT - #PV; //计算偏差
IF #ErKp<-#DEADB_W THEN
#ER := #ErKp + #DEADB_W;
ELSIF #ErKp>#DE
ADB_W THEN
#ER := #ErKp - #DEADB_W;
ELSE
#ER := 0.0;
END_IF;
#ErKp := #ER * #G
AIN;//偏差比例增益
#rTi := DINT_TO_REAL(TIME_TO_DINT(#TI)) / 1000.0;
#rTd := DINT_TO_REAL(TIME_TO_DINT(#TD)) / 1000.0;
#rTmLag := DINT_TO_REAL(TIME_TO_DINT(#TM_LAG)) / 1000.0;
IF #rTi < #rCYcle*0.5 THEN //积分时间必须>=采样时间的0.5倍
#rTi := #rCYcle * 0.5;
END_IF;
IF #rTd < #rCYcle THEN //微分时间必须>=采样时间
#rTd := #rCYcle;
END_IF;
IF #rTmLag<#rCYcle *0.5 THEN //微分作用延时时间必须>=采样时间的0.5倍
#rTmLag := #rCYcle * 0.5;
END_IF;
IF #P_SEL THEN //如果比例作用投入
#Panteil := #ErKp;
ELSE
#Panteil := 0.0;
END_IF;
IF #I_SEL THEN //如果积分作用投入
IF #I_ITL_ON THEN //积分初始化
#Ianteil := #I_ITLVAL;
#sRestlnt := 0.0;
ELSIF #MAN_ON THEN //手动值输入时的积分量计算,用于手动切换自动无扰切换
#Ianteil := #sLmn - #Panteil - #DISV;
#sRestlnt := 0.0;
ELSE //积分计算
#Iant := (#rCYcle / #rTi) * (#ErKp + #sInvAlt) * 0.5 + #sRestlnt;
IF ((#Iant>0.0 AND #sbArwHLmOn) OR #INT_HOLD) OR (#Iant<0.0 AND #sbArwLLmOn) THEN
#Iant := 0.0;
END_IF;
#Ianteil := #sIanteilAlt + #Iant;//当前积分值:=上时刻积分值+本次积分量
#sRestlnt := #sIanteilAlt - #Ianteil + #Iant;
END_IF;
ELSE
#Ianteil := 0.0;
#sRestlnt := 0.0;
END_IF;
#Diff := #ErKp;
IF NOT #MAN_ON AND #D_SEL THEN //如果微分投入作用
#Verstaerk := #rTd / (#rCYcle * 0.5 + #rTmLag);
#Danteil := (#Diff - #sRueck) * #Verstaerk;
#RueckAlt := #sRueck;
#RueckDiff := #rCYcle / #rTd * #Danteil + #sRestDif;
#sRueck := #RueckDiff + #RueckAlt;
#sRestDif := #RueckAlt - #sRueck + #RueckDiff; //同积分一样计算微分误差量
ELSE
#Danteil := 0.0;
#sRestDif := 0.0;
#Verstaerk := 0.0;
#RueckAlt := 0.0;
#RueckDiff := 0.0;
#sRueck := 0.0;
END_IF;
IF #MAN_ON THEN //如果PID手动值打开
#dLmn := #MAN;
ELSE
IF NOT #I_ITL_ON AND #I_SEL THEN //干扰量处理
IF #Ianteil> #LMN_HLM-#DISV AND #dLmn > #LMN_HLM AND #dLmn-#LMN_D>#LMN_HLM THEN
#rVal := #LMN_HLM - #DISV;
#gf := #dLmn - #LMN_HLM;
#rVal := #Ianteil - #rVal;
IF #rVal >#gf THEN
#rVal := #gf;
END_IF;
#Ianteil := #Ianteil - #rVal;
ELSIF #Ianteil<#LMN_LLM-#DISV AND #dLmn <#LMN_LLM AND #dLmn -#LMN_D<#LMN_HLM THEN
#rVal := #LMN_LLM - #DISV;
#gf := #dLmn - #LMN_LLM;
#rVal := #Ianteil - #rVal;
IF #rVal<#gf THEN
#rVal := #gf;
END_IF;
#Ianteil := #Ianteil - #rVal;
END_IF;
END_IF;
END_IF;
#LMN_P := #Panteil;
#LMN_I := #Ianteil;
#LMN_D := #Danteil;
#sInvAlt := #ErKp;
#sIanteilAlt := #Ianteil;
#sbArwHLmOn := FALSE;
#sbArwLLmOn := FALSE;
IF #dLmn >= #LMN_HLM THEN //如果到达调节量上限
#QLMN_HLM := TRUE;
#QLMN_LLM := FALSE;
#dLmn := #LMN_HLM;
#sbArwHLmOn := TRUE;
ELSE
#QLMN_HLM := FALSE;
IF #dLmn<=#LMN_LLM THEN //如果到达调节量下限
#QLMN_LLM := TRUE;
#dLmn := #LMN_LLM;
#sbArwLLmOn := TRUE;
ELSE
#QLMN_LLM := FALSE;
END_IF;
END_IF;
#sLmn := #dLmn;
#dLmn := #dLmn * #LMN_FAC + #LMN_OFF;
#LMN := #dLmn;
#dLmn := #dLmn * 276.48;
IF #dLmn >=32512.0 THEN
#dLmn := 32512.0;
ELSIF #dLmn <= -32512.0 THEN
#dLmn := -32512.0;
END_IF;
#LMN_PER := INT_TO_WORD(DINT_TO_INT(REAL_TO_DINT(#dLmn)));
END_IF;
 西门子PID控制算法-FB块封装
西门子PID控制算法-FB块封装








 工商网监
工商网监
评论