 CANopen转EtherCAT网关连接伺服驱动
CANopen转EtherCAT网关连接伺服驱动

在现代工业自动化领域,CANopen和EtherCAT是两种常见的通信协议,各自在不同的应用场景中发挥着重要作用。然而,随着工业自动化系统的日益复杂化,不同设备间的通信需求也变得多样化。因此,如何实现不同协议设备之间的无缝连接成为工程师们面临的一个关键问题。本文将探讨开疆智能CANopen转EtherCAT网关KJ-ECAT-CANP的应用,以及其在伺服驱动控制中的应用案例。

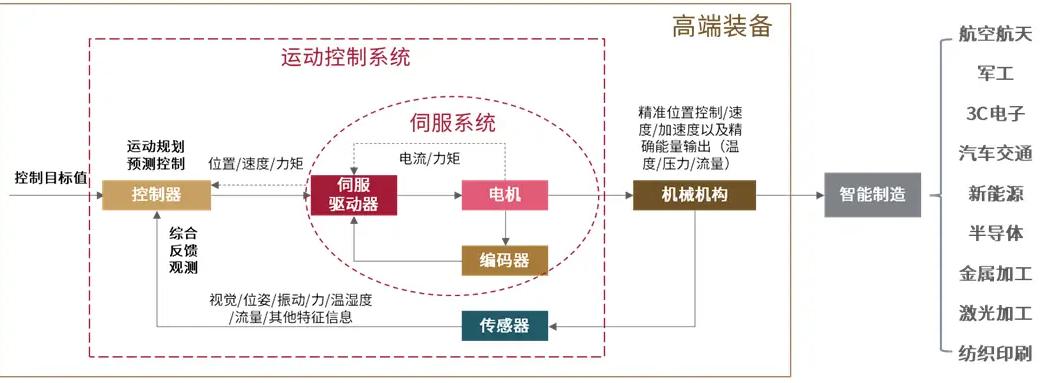
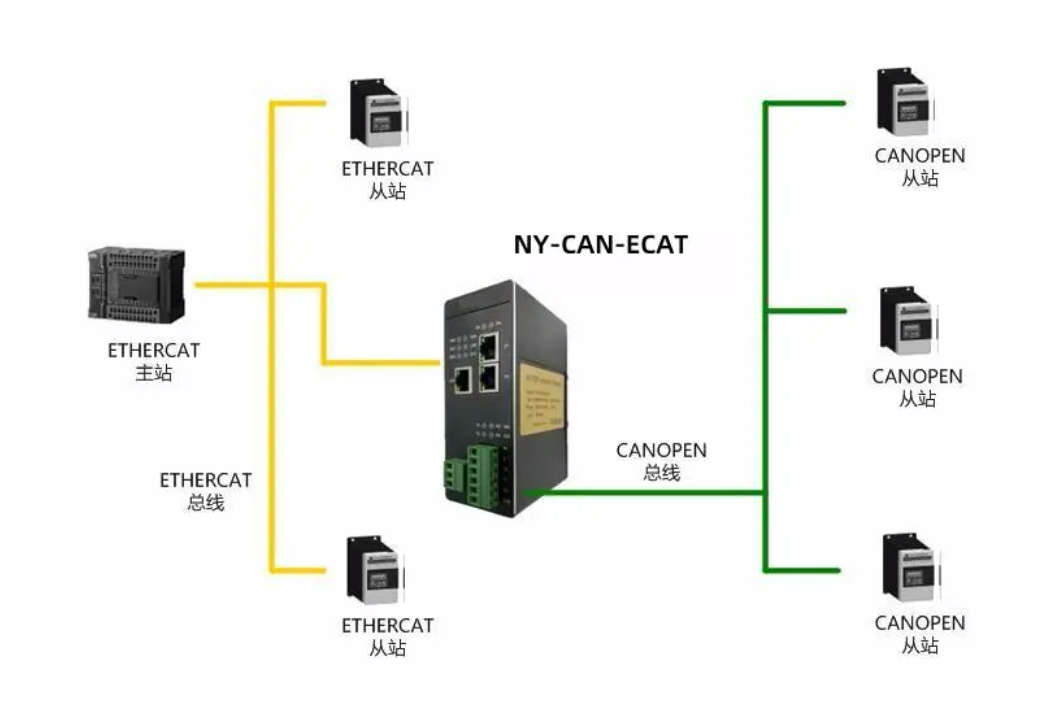
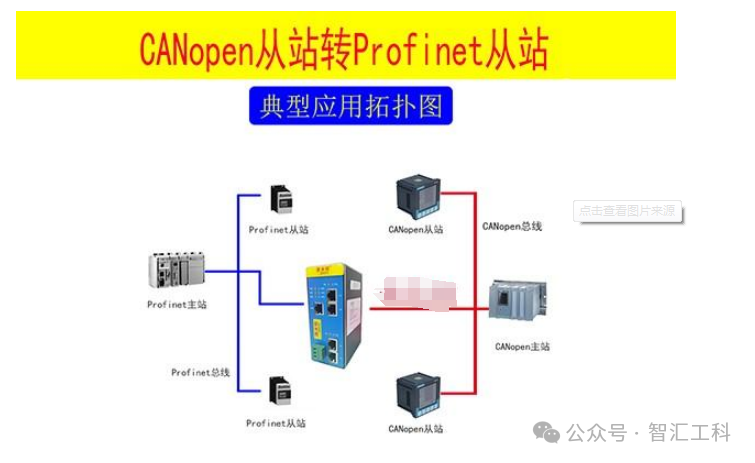
在工业自动化系统中,CANopen是一种基于串行总线的通信协议,广泛应用于伺服驱动器等设备的控制中。它具有开放性、可扩展性和灵活性的特点,能够满足伺服系统对实时性和可靠性的要求。而EtherCAT作为一种基于以太网的高速通信协议,以其优异的性能和广泛的应用前景受到越来越多企业的青睐。它不仅支持长距离通信,还能通过标准以太网接口与各种设备进行连接。为了解决CANopen设备与EtherCAT网络的互操作性问题,市场上推出了CANopen转EtherCAT协议转换网关。这种网关能够将CANopen接口设备连接到EtherCAT网络系统中,作为EtherCAT网络的一个从站,实现两种不同协议设备之间的数据交换和控制信号传递。
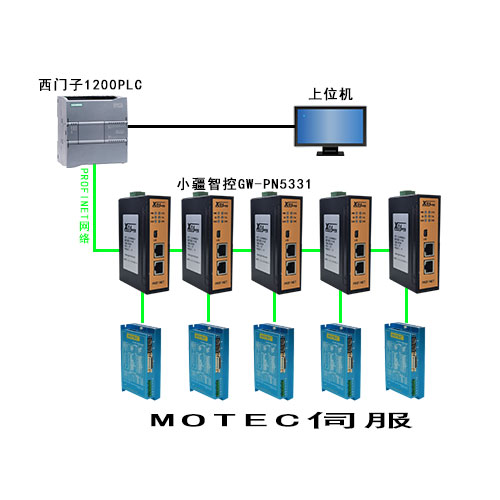
使用开疆智能CANopen转EtherCAT网关的好处在于,它可以简化系统集成的过程,使得原本不支持EtherCAT协议的设备也能够轻松接入到EtherCAT网络中。这不仅提高了系统的灵活性和兼容性,还能够减少因更换设备而产生的额外成本,此外,网关的使用还可以提高数据传输的速度和稳定性,为工业生产提供更加可靠的保障。在实际应用中,例如在一个自动化生产线上,我们需要将多个伺服驱动器通过CANopen协议进行精确控制。这些伺服驱动器分别负责不同的工序,如物料搬运、加工定位等。为了将这些伺服驱动器集成到一个统一的EtherCAT网络中,我们可以使用CANopen转EtherCAT网关来实现这一目标。
我们需要根据项目需求选择合适的硬件设备,包括伺服驱动器、网关、控制器等。在选择过程中,我们需要注意设备的兼容性和性能指标,以确保系统的稳定运行。接着需要准备相应的接线图和参数设置表,以便在安装和调试过程中参考。这些资料通常由设备供应商提供,用户可以根据实际需要进行调整。接下来,我们需要编写PLC程序来控制伺服驱动器的运动。在这个过程中,我们可以利用工具来简化编程工作。
我们需要对整个系统进行测试和优化。这包括检查硬件连接是否正确、软件配置是否合理、系统运行是否稳定等方面。只有当所有环节都经过严格测试并满足设计要求时,才能确保系统的正常运行和生产效率的提升。开疆智能CANopen转EtherCAT网关的应用为工业自动化领域提供了一种灵活的解决方案。它不仅简化了系统集成的过程,还提高了系统的性能和可靠性。随着工业自动化技术的不断发展和完善,相信这类产品将会在未来发挥更加重要的作用。
-
CANopen
+关注
关注
8文章
521浏览量
49876 -
伺服驱动
+关注
关注
4文章
103浏览量
18342 -
ethercat
+关注
关注
20文章
1582浏览量
46266
发布评论请先 登录


应用案例丨伺服驱动器连接Ethercat转profinet网关
Profinet转Canopen网关连接MOTEC伺服
Profinet转Canopen网关连接MOTEC伺服配置案例
应用案例丨伺服驱动器连接Ethercat转profinet网关
CanOpen转Profinet网关连接SD100伺服驱动器与PLC配置案例
伺服驱动器连接Ethercat转profinet网关应用

耐用通信Ethercat转canopen网关在钢铁行业的应用案例
3步轻松实现Canopen转EtherCAT网关连接伺服驱动!
CANopen转EtherCAT网关连接伺服驱动
CANOpen转PROFINET网关连接低压伺服系统
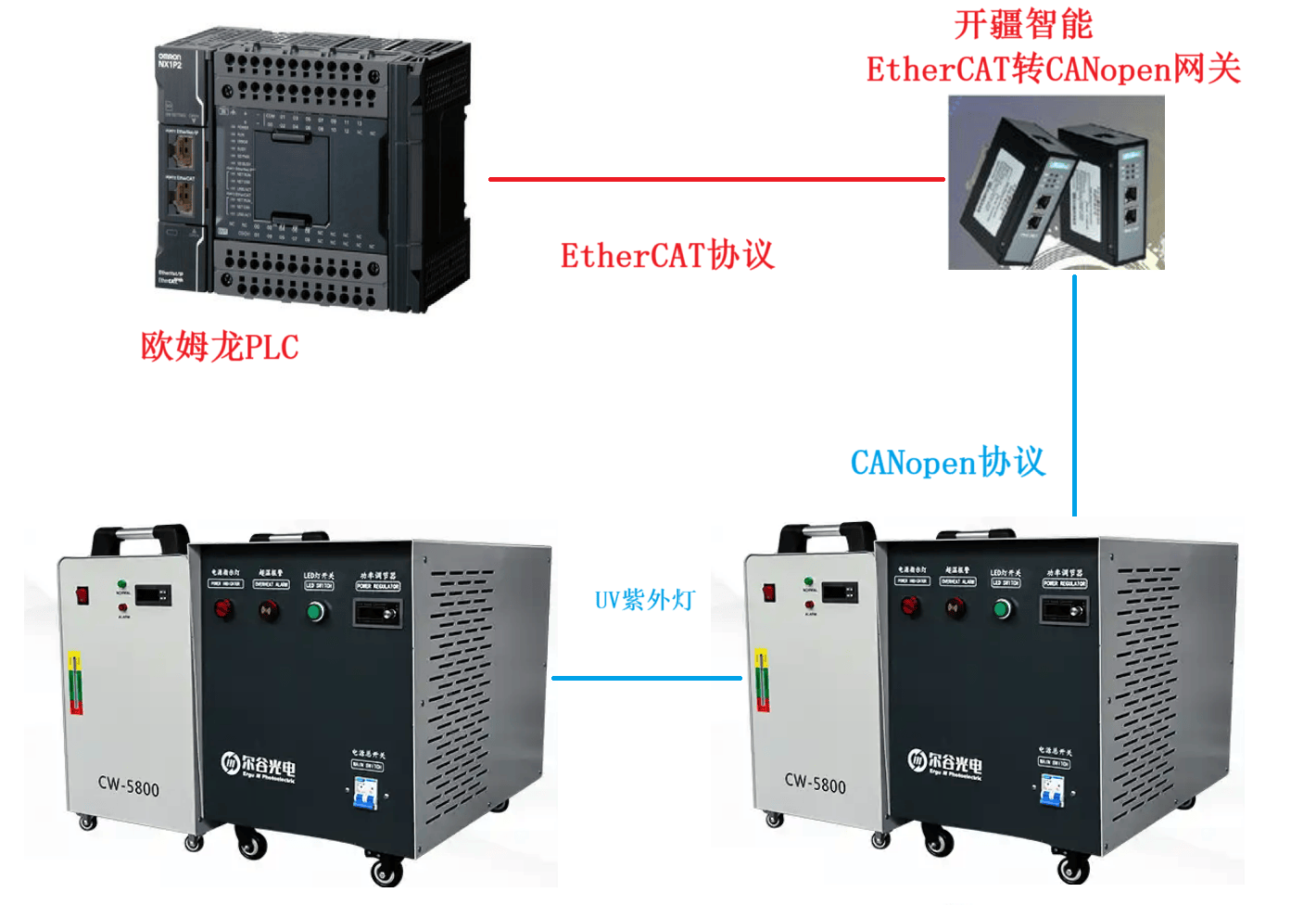
开疆智能EtherCAT转CANopen网关连接UV灯配置案例



评论