 ElfBoard开源项目|智能消防车项目
ElfBoard开源项目|智能消防车项目
智慧城市的建设推动了城市各个领域的智能化发展,消防领域也不例外。智慧消防作为智慧城市的重要组成部分,其建设和发展与智慧城市的建设紧密相连。
在此背景下,ElfBoard团队完成了一个创新性的开源项目——利用ELF 1开发板打造的智慧消防车。该项目展现了物联网、数据处理等前沿技术在消防领域的应用潜力,下面就和各位小伙伴展示一下这个开源项目是怎样实现的。
项目简介
智能消防车通过阿里云平台实现远程控制,使得用户可以远程控制车到达指定地点进行灭火,或者通过火焰传感器检测到火焰时自动响应灭火操作。
功能特性
1、数据监测与显示:实时监测车运行状态,并直观地显示在Web界面上。
2、Web可视化界面:用户可以通过Web界面远程控制车的移动。
3、远程控制:通过阿里云物联网平台向车发送指令,实现远程操作和控制。
4、自动灭火:根据火焰传感器检测到的火焰情况,自动触发灭火操作。
环境说明
1、开发环境操作系统:Ubuntu18.04 64位版
2、交叉编译工具链:arm-poky-linux-gnueabi-gcc 5.3.0
3、开发板使用Bootloader版本:u-boot-2016.03
4、开发板内核版本:linux-4.1.15
5、开发板移植QT版本:qt5.6.2
硬件配置
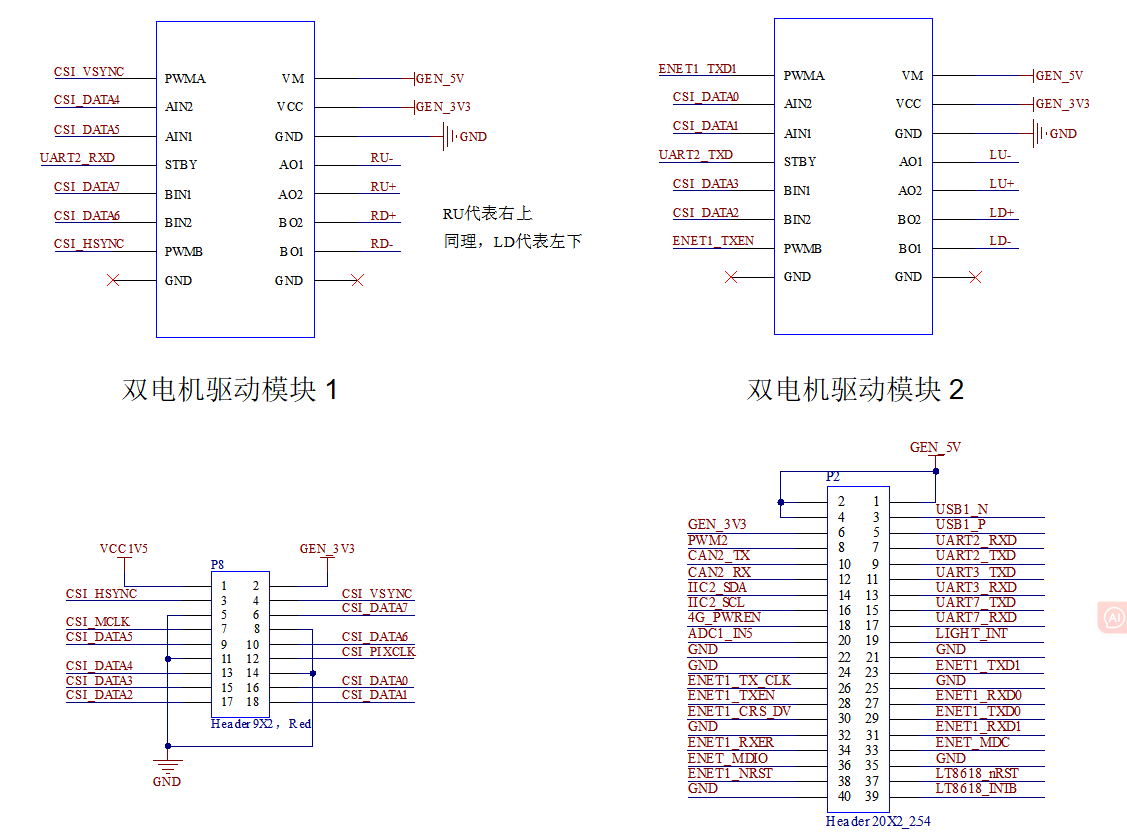
1、小车驱动装置
小车驱动装置主要由TB6612FNG双电机驱动板、TT马达、车轮等组成。
(1)TB6612FNG双电机驱动板
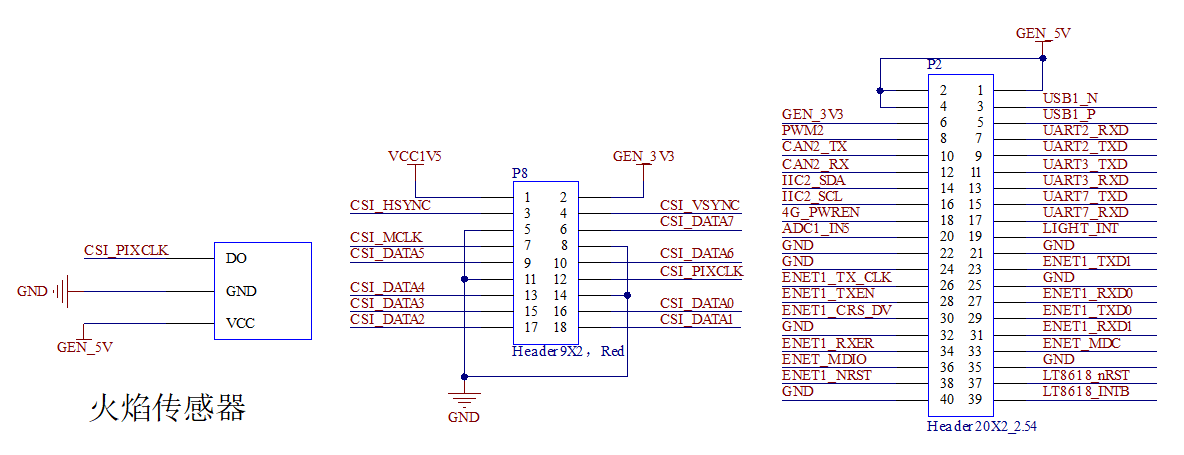
2、灭火装置
灭火装置主要由火焰传感器、继电器、水泵等组成。
(1)火焰传感器
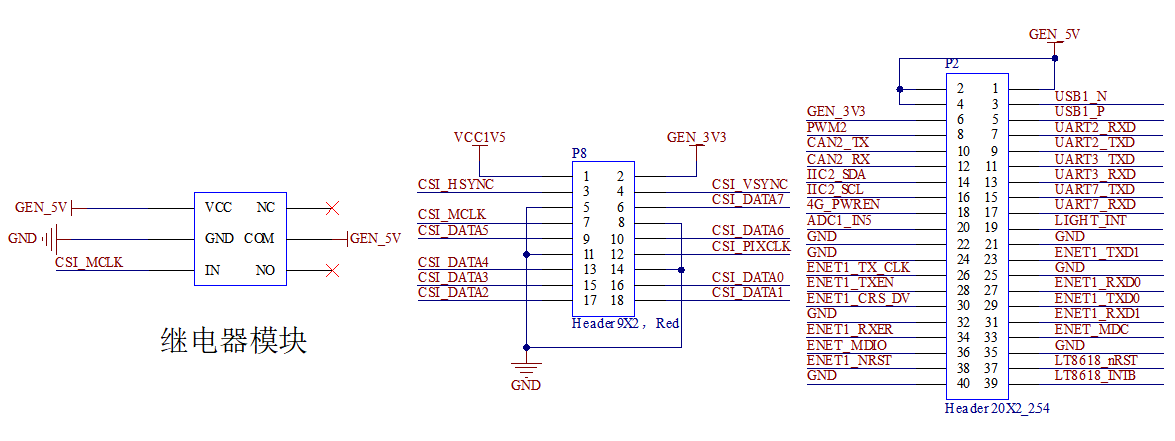
(2)继电器
(3)水泵
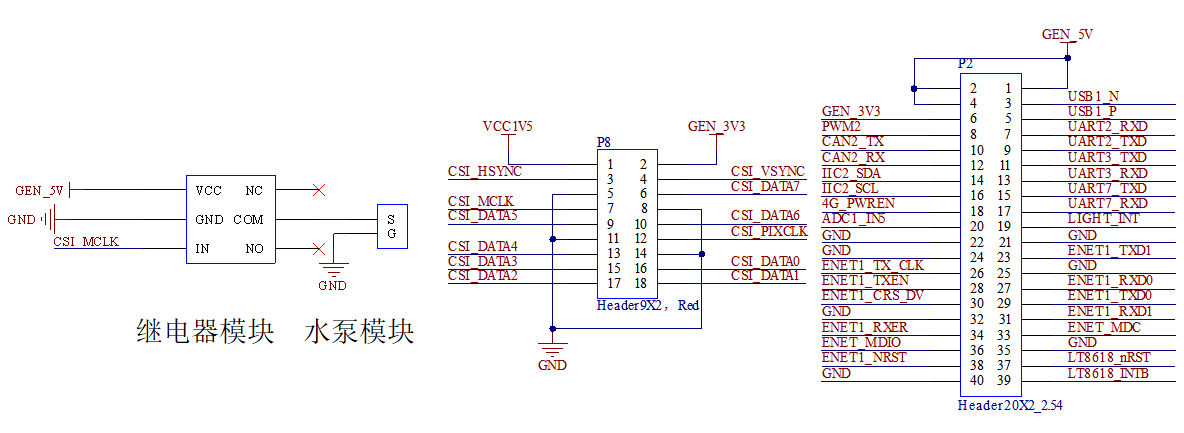
3、整体连接示意图
内核适配
1、实现正常驱动小车的功能
消防车驱动装置主要由TB6612FNG双电机驱动板,驱动板中pwm引脚接受板卡输出的pwm信号,通过调整pwm信号的占空比来控制输出电压,进而控制电机的转速,从而控制小车速度,AIN0/AIN1:连接板卡的IO端口,用于控制电机的转动方向。通过控制这两个引脚的电平状态,可以实现电机的正转、反转或停止。下面来介绍如何使用EFL 1板卡进行pwm复用以及gpio复用。
(1)复用pwm
1)拷贝
ELF1开发板资料包\02-Linux 源代码\02-0 出厂内核和uboot源码\内核源码\linux-4.1.15-elf1.tar.bz2内核源码到开发环境/home/elf/work/目录下解压。
elf@ubuntu:~/work$ tar -xvf linux-4.1.15-elf1.tar.bz2
2)修改顶层设备树文件arch/arm/boot/dts/imx6ull.dtsi。
elf@ubuntu:~/work$ cd linux-4.1.15-elf1/ elf@ubuntu:~/work/linux-4.1.15-elf1$ vi arch/arm/boot/dts/imx6ull.dtsi
3)修改设备树文件arch/arm/boot/dts/imx6ull-elf1-emmc.dts。
elf@ubuntu:~/work/linux-4.1.15-elf1$ vi arch/arm/boot/dts/imx6ull-elf1-emmc.dts
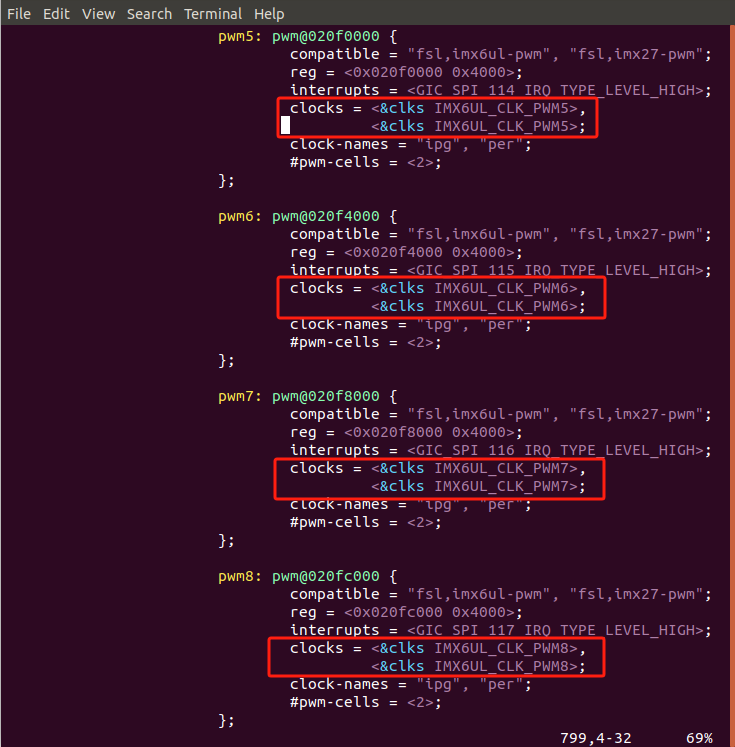
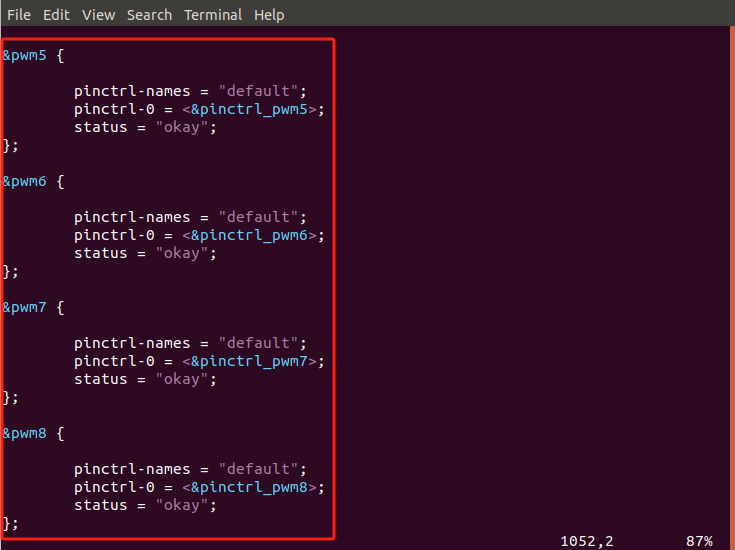
添加设备节点
&pwm5 { pinctrl-names = "default"; pinctrl-0 = <&pinctrl_pwm5>; status = "okay"; }; &pwm6 { pinctrl-names = "default"; pinctrl-0 = <&pinctrl_pwm6>; status = "okay"; }; &pwm7 { pinctrl-names = "default"; pinctrl-0 = <&pinctrl_pwm7>; status = "okay"; }; &pwm8 { pinctrl-names = "default"; pinctrl-0 = <&pinctrl_pwm8>; status = "okay"; };
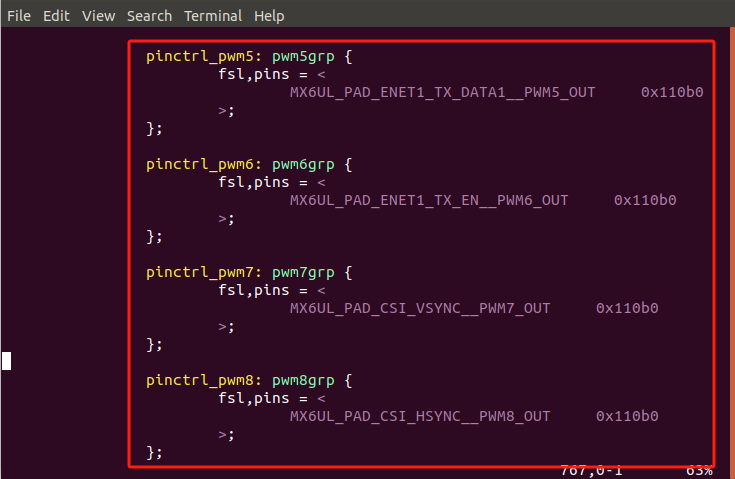
在iomux节点下面添加引脚复用
pinctrl_pwm5: pwm5grp { fsl,pins = < MX6UL_PAD_ENET1_TX_DATA1__PWM5_OUT 0x110b0 >; }; pinctrl_pwm6: pwm6grp { fsl,pins = < MX6UL_PAD_ENET1_TX_EN__PWM6_OUT 0x110b0 >; }; pinctrl_pwm7: pwm7grp { fsl,pins = < MX6UL_PAD_CSI_VSYNC__PWM7_OUT 0x110b0 >; }; pinctrl_pwm8: pwm8grp { fsl,pins = < MX6UL_PAD_CSI_HSYNC__PWM8_OUT 0x110b0 >; };
取消其它用到csi、enet1功能的地方
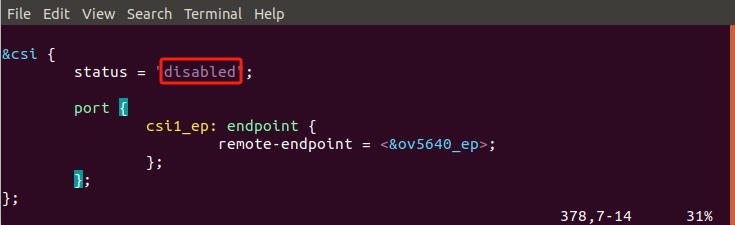
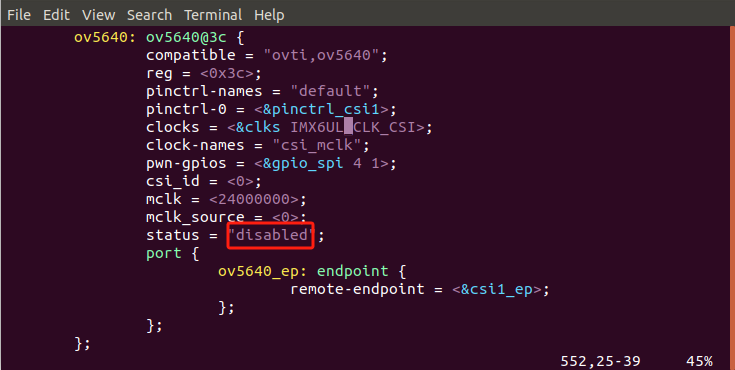
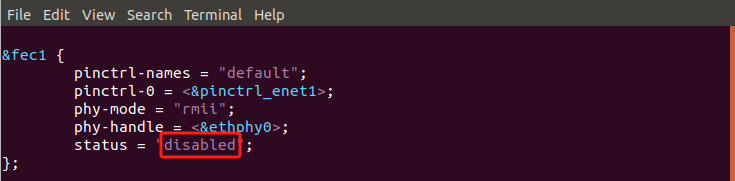
至此pwm已经复用完成。
(2)复用gpio
1)修改设备树文件arch/arm/boot/dts/imx6ull-elf1-emmc.dts
elf@ubuntu:~/work$ cd linux-4.1.15-elf1/ elf@ubuntu:~/work/linux-4.1.15-elf1$ vi arch/arm/boot/dts/imx6ull-elf1-emmc.dts
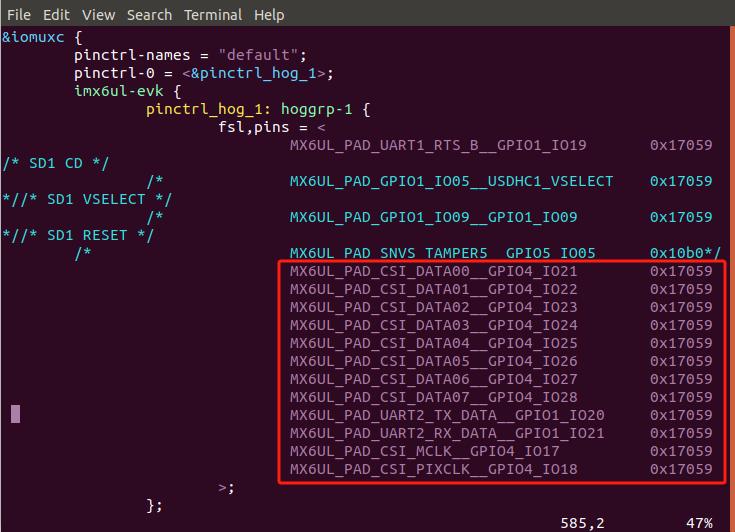
在iomux节点下面添加引脚复用
MX6UL_PAD_CSI_DATA00__GPIO4_IO21 0x17059 MX6UL_PAD_CSI_DATA01__GPIO4_IO22 0x17059 MX6UL_PAD_CSI_DATA02__GPIO4_IO23 0x17059 MX6UL_PAD_CSI_DATA03__GPIO4_IO24 0x17059 MX6UL_PAD_CSI_DATA04__GPIO4_IO25 0x17059 MX6UL_PAD_CSI_DATA05__GPIO4_IO26 0x17059 MX6UL_PAD_CSI_DATA06__GPIO4_IO27 0x17059 MX6UL_PAD_CSI_DATA07__GPIO4_IO28 0x17059 MX6UL_PAD_UART2_TX_DATA__GPIO1_IO20 0x17059 MX6UL_PAD_UART2_RX_DATA__GPIO1_IO21 0x17059 MX6UL_PAD_CSI_MCLK__GPIO4_IO17 0x17059 MX6UL_PAD_CSI_PIXCLK__GPIO4_IO18 0x17059
取消其它用到csi、uart2功能的地方
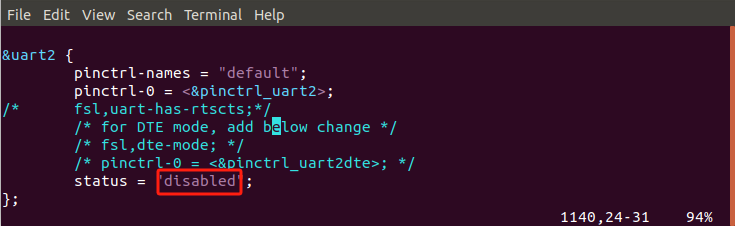
至此gpio已经复用完成
(3)编译并替换设备树
1)执行环境变量
elf@ubuntu:~/work/linux-4.1.15-elf1$ . /opt/fsl-imx-x11/4.1.15-2.0.0/environment-setup-cortexa7hf-neon-poky-linux-gnueabi
2)编译设备树和内核
elf@ubuntu:~/work/linux-4.1.15-elf1$ make imx6ull_elf1_defconfig elf@ubuntu:~/work/linux-4.1.15-elf1$ make dtbs
3)将arch/arm/boot/dts/路径下的imx6ull-elf1-emmc.dtb放到U盘,通过U盘拷贝到开发板
root@ELF1:~# cp /run/media/sda1/imx6ull-elf1-emmc.dtb /run/media/mmcblk1p1/
4)保存并重启开发板
root@ELF1:~# sync root@ELF1:~# reboot
配基于云平台的远程数据监测和设备控制
1、配置阿里云物联网平台
(1)注册并登录阿里云账号(2)开通物联网平台服务(3)开通公共实例(4)创建产品(5)添加设备(6)发布产品
2、配置IoT Stdio
(1)领取IoT Stdio体验版免费试用机会(2)新建项目(3)关联物联网平台产品、设备(4)新建Web应用(5)配置Web显示界面(6)发布应用
3、程序设计
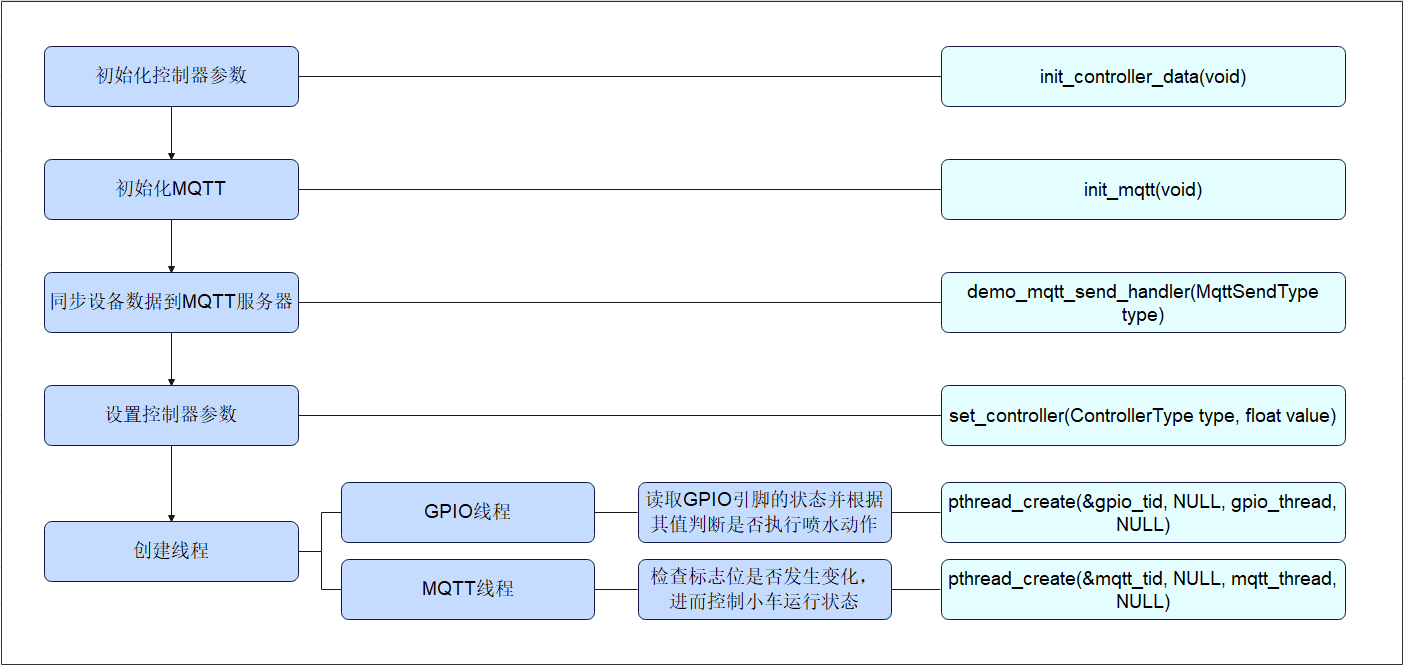
主函数的实现main.cpp
int main(int argc, char *argv[]) { pthread_t gpio_tid, mqtt_tid; // 信号处理 signal(SIGTERM, SignHandler); signal(SIGINT, SignHandler); // 初始化控制参数 if (-1 == init_controller_data()) goto to_end; // 初始化MQTT并建立连接 init_mqtt(); // 将设备数据同步到MQTT服务器 demo_mqtt_send_handler(SET_STRAIGHT_TO_SEND); demo_mqtt_send_handler(SET_LEFT_TO_SEND); demo_mqtt_send_handler(SET_RIGHT_TO_SEND); demo_mqtt_send_handler(SET_BACK_TO_SEND); demo_mqtt_send_handler(SET_STOP_TO_SEND); demo_mqtt_send_handler(SET_WATER_TO_SEND); set_controller(Upperleft, 5.0); set_controller(Lowerleft, 5.0); set_controller(Upperright, 5.0); set_controller(Lowerright, 5.0); set_controller(left, 1.0); set_controller(right, 1.0); set_controller(c8, 1.0); demo_mqtt_send_handler(SET_UPPERLEFT_TO_SEND); demo_mqtt_send_handler(SET_LOWERLEFT_TO_SEND); demo_mqtt_send_handler(SET_UPPERRIGHT_TO_SEND); demo_mqtt_send_handler(SET_LOWERRIGHT_TO_SEND); // 创建GPIO线程 if (pthread_create(&gpio_tid, NULL, gpio_thread, NULL) != 0) { perror("pthread_create for gpio_thread"); goto to_end; } // 创建MQTT线程 if (pthread_create(&mqtt_tid, NULL, mqtt_thread, NULL) != 0) { perror("pthread_create for mqtt_thread"); goto to_end; } pthread_join(gpio_tid, NULL); pthread_join(mqtt_tid, NULL); to_end: // 遇到异常,退出进程前,回收资源 release_mqtt(); release_controller_devices(); sleep(1); exit(1); }
int init_controller_data(void) { controller.left.value = 0; controller.right.value = 0;
controller.Upperleft.value = 0; controller.Upperright.value = 0;
controller.Lowerleft.value = 0; controller.Lowerright.value = 0;
controller.go_straight.value = 0; controller.turn_left.value = 0;
controller.turn_right.value = 0;
controller.go_back.value = 0; controller.go_stop.value = 0;
controller.spray_water.value = 0; controller.left.flag = 0;
controller.right.flag = 0; controller.Upperleft.flag = 0;
controller.Upperright.flag = 0; controller.Lowerleft.flag = 0; controller.Lowerright.flag = 0; controller.go_straight.flag = 0;
controller.turn_left.flag = 0; controller.turn_right.flag = 0;
controller.go_back.flag = 0; controller.go_stop.flag = 0;
controller.spray_water.flag = 0; return 0; }
初始化MQTT
/* init_mqtt, 初始化,跟mqtt服务器建立链接,设置订阅,创建通道管理线程,创建接收处理线程 */ int init_mqtt(void)
{ int32_t res = STATE_SUCCESS; uint16_t port = 443; /* 无论设备是否使用TLS连接阿里云平台, 目的端口都是443 */
aiot_sysdep_network_cred_t cred; /* 安全凭据结构体, 如果要用TLS, 这个结构体中配置CA证书等参数 */ char sub_topic[100] = {0}; /* 配置SDK的底层依赖 */
aiot_sysdep_set_portfile(&g_aiot_sysdep_portfile); /* 配置SDK的日志输出 */
aiot_state_set_logcb(demo_state_logcb); /* 创建SDK的安全凭据, 用于建立TLS连接 */ memset(&cred, 0, sizeof(aiot_sysdep_network_cred_t)); cred.option = AIOT_SYSDEP_NETWORK_CRED_SVRCERT_CA; /* 使用RSA证书校验MQTT服务端 */ cred.max_tls_fragment = 16384; /* 最大的分片长度为16K, 其它可选值还有4K, 2K, 1K, 0.5K */
cred.sni_enabled = 1; /* TLS建连时, 支持Server Name Indicator */ cred.x509_server_cert = ali_ca_cert; /* 用来验证MQTT服务端的RSA根证书 */ cred.x509_server_cert_len = strlen(ali_ca_cert);
/* 用来验证MQTT服务端的RSA根证书长度 */ /* 创建1个MQTT客户端实例并内部初始化默认参数 */
mqtt_handle = aiot_mqtt_init(); if (mqtt_handle == NULL) { printf("aiot_mqtt_init failed\n"); return -1; } /* TODO: 如果以下代码不被注释, 则例程会用TCP而不是TLS连接云平台 */
{ memset(&cred, 0, sizeof(aiot_sysdep_network_cred_t)); cred.option = AIOT_SYSDEP_NETWORK_CRED_NONE; } /* 配置MQTT服务器地址 */ aiot_mqtt_setopt(mqtt_handle, AIOT_MQTTOPT_HOST, (void *)mqtt_host); /* 配置MQTT服务器端口 */ aiot_mqtt_setopt(mqtt_handle, AIOT_MQTTOPT_PORT, (void *)&port); /* 配置设备productKey */
aiot_mqtt_setopt(mqtt_handle, AIOT_MQTTOPT_PRODUCT_KEY, (void *)product_key);
/* 配置设备deviceName */
aiot_mqtt_setopt(mqtt_handle, AIOT_MQTTOPT_DEVICE_NAME, (void *)device_name);
/* 配置设备deviceSecret */ aiot_mqtt_setopt(mqtt_handle, AIOT_MQTTOPT_DEVICE_SECRET, (void *)device_secret); /* 配置网络连接的安全凭据, 上面已经创建好了 */
aiot_mqtt_setopt(mqtt_handle, AIOT_MQTTOPT_NETWORK_CRED, (void *)&cred); /* 配置MQTT默认消息接收回调函数 */ aiot_mqtt_setopt(mqtt_handle, AIOT_MQTTOPT_RECV_HANDLER, (void *)demo_mqtt_default_recv_handler); /* 配置MQTT事件回调函数 */
aiot_mqtt_setopt(mqtt_handle, AIOT_MQTTOPT_EVENT_HANDLER, (void *)demo_mqtt_event_handler);
/* 与服务器建立MQTT连接 */
res = aiot_mqtt_connect(mqtt_handle);
if (res < STATE_SUCCESS) { /* 尝试建立连接失败, 销毁MQTT实例, 回收资源 */ aiot_mqtt_deinit(&mqtt_handle); printf("aiot_mqtt_connect failed: -0x%04X\n\r\n", -res); printf("please check variables like mqtt_host, produt_key, device_name, device_secret in demo\r\n"); return -1; }
/* MQTT 订阅topic功能示例, 请根据自己的业务需求进行使用 */
{ strcpy(sub_topic, "/sys/k1l0mrfjkHG/control_unit_1/thing/service/property/set"); res = aiot_mqtt_sub(mqtt_handle, sub_topic, NULL, 1, NULL); if (res < 0) { printf("aiot_mqtt_sub failed, res: -0x%04X\n", -res); return -1; } }
/* 创建一个单独的线程, 专用于执行aiot_mqtt_process, 它会自动发送心跳保活, 以及重发QoS1的未应答报文 */
g_mqtt_process_thread_running = 1; res = pthread_create(&g_mqtt_process_thread, NULL, demo_mqtt_process_thread, mqtt_handle); if (res < 0) { printf("pthread_create demo_mqtt_process_thread failed: %d\n", res); return -1; } /* 创建一个单独的线程用于执行aiot_mqtt_recv, 它会循环收取服务器下发的MQTT消息, 并在断线时自动重连 */ g_mqtt_recv_thread_running = 1; res = pthread_create(&g_mqtt_recv_thread, NULL, demo_mqtt_recv_thread, mqtt_handle); if (res < 0) { printf("pthread_create demo_mqtt_recv_thread failed: %d\n", res); return -1; } return 0; }
同步设备数据到MQTT服务器
demo_mqtt_send_handler(SET_STRAIGHT_TO_SEND); demo_mqtt_send_handler(SET_LEFT_TO_SEND); demo_mqtt_send_handler(SET_RIGHT_TO_SEND); demo_mqtt_send_handler(SET_BACK_TO_SEND); demo_mqtt_send_handler(SET_STOP_TO_SEND); demo_mqtt_send_handler(SET_WATER_TO_SEND); demo_mqtt_send_handler(SET_UPPERLEFT_TO_SEND); demo_mqtt_send_handler(SET_LOWERLEFT_TO_SEND); demo_mqtt_send_handler(SET_UPPERRIGHT_TO_SEND); demo_mqtt_send_handler(SET_LOWERRIGHT_TO_SEND);
设置控制器参数
set_controller(Upperleft, 5.0); set_controller(Lowerleft, 5.0); set_controller(Upperright, 5.0); set_controller(Lowerright, 5.0); set_controller(left, 1.0); set_controller(right, 1.0); set_controller(c8, 1.0);
GPIO线程
// GPIO线程函数 void *gpio_thread(void *arg) { while (1) { int value = 0; set_gpio(c9, 114); value = read_gpio_value(c9_GPIO_VALUE); pthread_mutex_lock(&gpio_mutex); printf("Value: %d\n", value); if (value == -1) { printf("Error occurred while reading file: %s\n", c9_GPIO_VALUE); } if (value == 0) { cspray_water(); } pthread_mutex_unlock(&gpio_mutex); usleep(100000); } return NULL; } // 创建GPIO线程 if (pthread_create(&gpio_tid, NULL, gpio_thread, NULL) != 0) { perror("pthread_create for gpio_thread"); goto to_end; }
MQTT线程
// MQTT线程函数 void *mqtt_thread(void *arg) { while (1) { pthread_mutex_lock(&mqtt_mutex); if (controller.Upperleft.flag == 1) { demo_mqtt_send_handler(SET_UPPERLEFT_TO_SEND); controller.Upperleft.flag = 0; } if (controller.Lowerleft.flag == 1) { demo_mqtt_send_handler(SET_LOWERLEFT_TO_SEND); controller.Lowerleft.flag = 0; } if (controller.Upperright.flag == 1)
{ demo_mqtt_send_handler(SET_UPPERRIGHT_TO_SEND); controller.Upperright.flag = 0; } if (controller.Lowerright.flag == 1) { demo_mqtt_send_handler(SET_LOWERRIGHT_TO_SEND); controller.Lowerright.flag = 0; } if (controller.go_straight.flag == 1)
{ demo_mqtt_send_handler(SET_STRAIGHT_TO_SEND); controller.go_straight.flag = 0;
} if (controller.turn_left.flag == 1) { demo_mqtt_send_handler(SET_LEFT_TO_SEND);
controller.turn_left.flag = 0; } if (controller.turn_right.flag == 1) { demo_mqtt_send_handler(SET_RIGHT_TO_SEND); controller.turn_right.flag = 0;
} if (controller.go_back.flag == 1) { demo_mqtt_send_handler(SET_BACK_TO_SEND);
controller.go_back.flag = 0; } if (controller.go_stop.flag == 1) { demo_mqtt_send_handler(SET_STOP_TO_SEND);
controller.go_stop.flag = 0; } if (controller.spray_water.flag == 1) { demo_mqtt_send_handler(SET_WATER_TO_SEND); controller.spray_water.flag = 0; } pthread_mutex_unlock(&mqtt_mutex); usleep(100000); } return NULL; } // 创建MQTT线程 if (pthread_create(&mqtt_tid, NULL, mqtt_thread, NULL) != 0) { perror("pthread_create for mqtt_thread"); goto to_end; }
4、应用编译
(1)拷贝car.tar.bz2到开发环境/home/elf/work目录下解压
elf@ubuntu:~/work$ tar xvf car.tar.bz2
(2)执行环境变量
elf@ubuntu:~/work$ . /opt/fsl-imx-x11/4.1.15-2.0.0/environment-setup-cortexa7hf-neon-poky-linux-gnueabi
(3)编译
elf@ubuntu:~/work$ cd car/ elf@ubuntu:~/work/car$ make
(4)拷贝mqtt_test到开发板/home/root路径下
root@ELF1:~# cp /run/media/sda1/mqtt_test ./
设项目测试
1、设置Wi-Fi连接
root@ELF1:~# elf1_cmd_wifi.sh -i 8723 -s 账号 -p 密码
2、执行应用
root@ELF1:~# ./mqtt_test

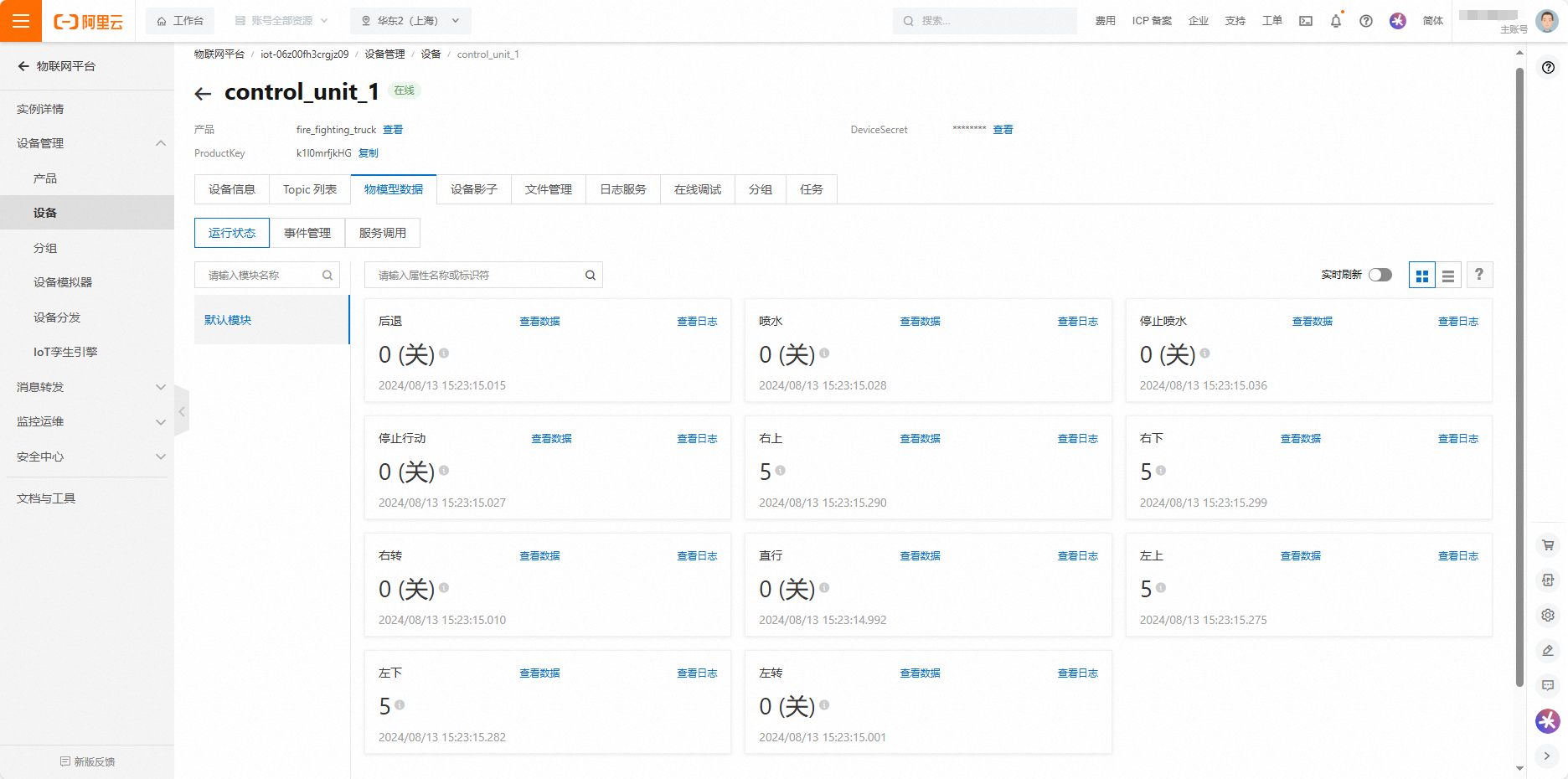
此时可以通过Web界面下发指令控制小车运行
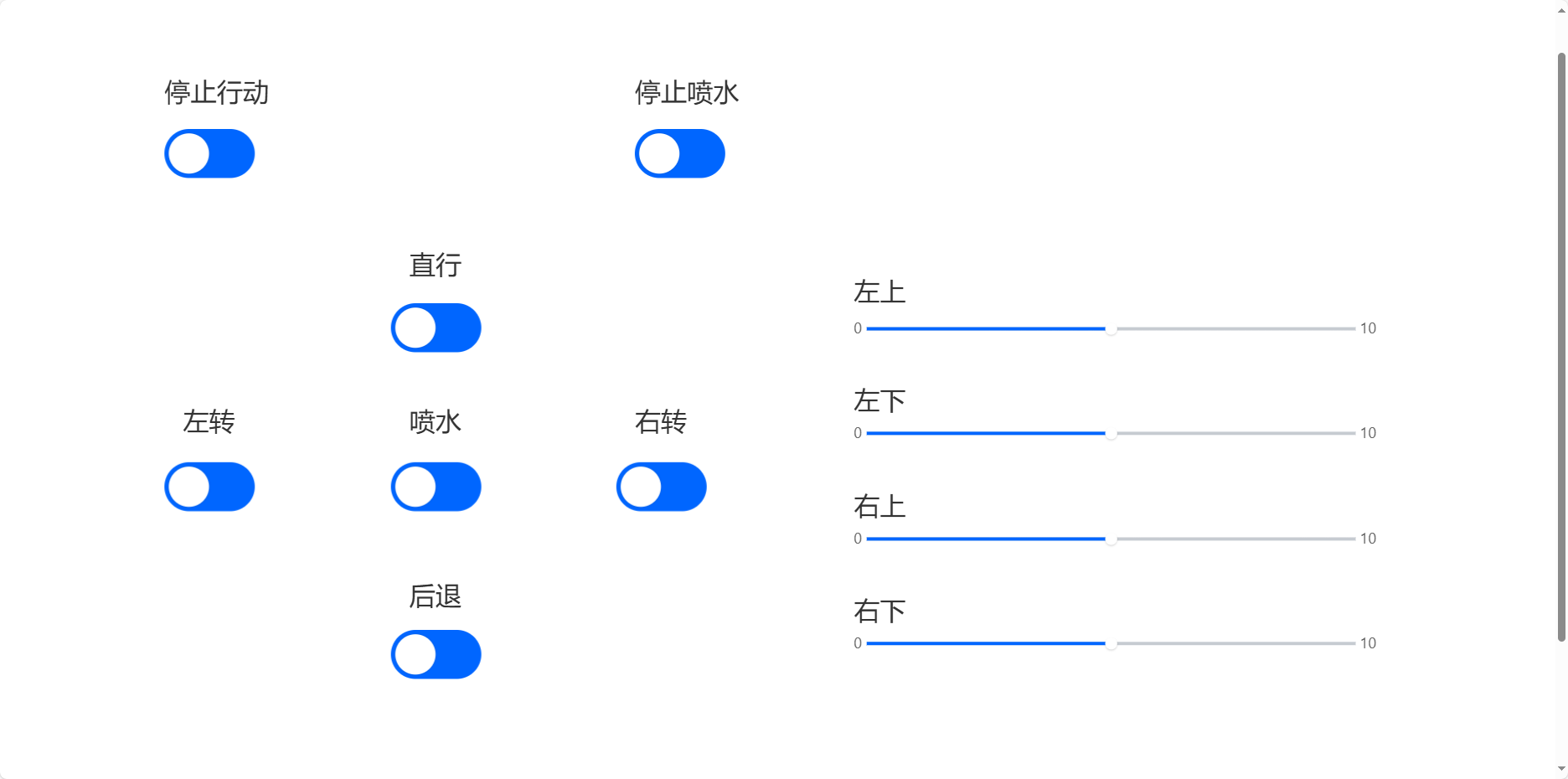
Web界面将实时显示小车的运行状态
至此,就已完成了对智能消防车这一开源项目的详细介绍。衷心希望这份指南能为有志于学习嵌入式技术的小伙伴们提供实质性的帮助与启发。
-
单片机
+关注
关注
6037文章
44569浏览量
636186 -
嵌入式
+关注
关注
5086文章
19141浏览量
305975 -
开发板
+关注
关注
25文章
5074浏览量
97661 -
智慧城市
+关注
关注
21文章
4269浏览量
97436 -
开源项目
+关注
关注
0文章
38浏览量
7208
发布评论请先 登录
相关推荐
基于单片机的新型消防车的研究
毕业设计:新型消防车研究
基于JetsoN Nano开发套件的开源智能车项目
基于EPC2000的消防车控制系统
简析倾角传感器在消防车的云梯的作用
特斯拉的驾驶系统看不到消防车?
特斯拉再次撞上消防车,自动驾驶系统就这么的不安全吗?
国产特种消防车是否可以采用国产底盘
世界上第一辆电动消防车,奥地利声称价值600万美元

用于诊断皮尔斯消防车的消防梯
泡沫消防车电控系统方案

ElfBoard开源项目|“智慧光伏”开源项目技术文档
5G 车联网赋能消防车调度,推动高效智能消防救援






 工商网监
工商网监
评论