 机器视觉运动控制一体机在视觉SCARA天地盖贴合的解决方案
机器视觉运动控制一体机在视觉SCARA天地盖贴合的解决方案
市场应用背景
纸盒天地盖是一种常见的包装形式,它是一种由更耐用、更厚的纸板或纸板材料制成的包装硬盒,经过预组装,因此结构坚固、稳定,不易折叠或凹陷,通常用于高端包装领域,如消费电子产品、食品礼盒、奢侈品、化妆品等产品硬盒包装。
包装行业近年来迅速发展,下游产业对纸盒天地盖品质和产能的需求不断增加。客户对产品外包装有多样化和高度定制化的需求,并同时面临劳动力成本上升带来的压力。
 ▲多类纸盒天地盖示意图▲
▲多类纸盒天地盖示意图▲
为应对这些挑战,纸盒天地盖生产商通过部署自动化控制解决方案来降低生产成本,简化流程,加速生产,提高效率,满足客户多样化的设计生产需求,保持市场竞争力和企业持续盈利能力。
纸盒天地盖成型的制作工序主要包括上料、折边、上胶、定位贴合和盒体成型等。其中,“天地盖定位贴合”最考验精度与速度,是最关键的一步,对最终产出的产品外观一致性和成型的品质起决定性作用。
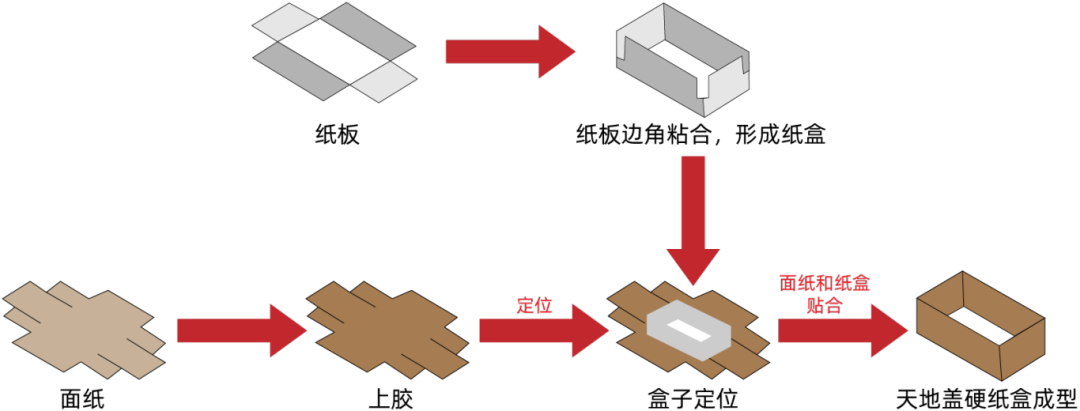 ▲纸盒天地盖成型工艺流程示意图▲
▲纸盒天地盖成型工艺流程示意图▲
市面上常见纸盒天地盖贴合方案:
早期传统的纸盒天地盖组装作业模式,主要依赖人工进行加工,工人操作强度大,工序繁琐,生产效率低,一致性和稳定性难以保证。
随着市场对产能要求的提高,市面上普遍使用全自动纸盒天地盖成型设备。通常采用“机械手本体 + 机械手电柜 + 机器视觉”的组合方案,实现自动定位贴合操作。
受限于传统多组件集成方式,往往会面临以下问题:
配件多、接线繁琐、故障排查麻烦、开发周期长;
视觉与运动控制之间的数据交互效率不高;
软硬集成度不高,功能整合度低;
多套硬件初始成本和维护成本高。
 ▲传统方案机械手组合▲
▲传统方案机械手组合▲
正运动技术解决方案:
正运动技术根据市场需求,开发了基于VPLC系列视觉运动控制一体机和RTFuse开放式视觉运动控制解决方案所拓展的视觉SCARA天地盖贴合解决方案,实现即插即用一站式解决方案,贴合精度可达±0.15mm。
可简化SCARA天地盖贴合的“视觉+运动控制+SCARA机械手控制”项目实施过程,同时有效提升生产效率和良率,灵活应对多样化、定制化的包装需求,并降低对人工的依赖。

支持单物料定位与双物料定位,多种天地盖贴合的模式;
易学,易懂,易操作,专机专用细分行业视觉运动控制解决方案;
支持静态视觉定位与动态视觉跟随定位贴合,贴合速度更快、精度更高;
一键式视觉标定,即可快速进行等待位、取料位、贴合位等,简易示教式操作;
软硬件集成度高,VPLC7系列控制器集成SCARA机械手控制、机器视觉、工控机、输入输出控制与编码器轴控制于一体,替代传统的机械人“电柜箱+工控机+PLC”等,可降低软硬件初始采购和维护成本,提高数据交互速率。
01 机器视觉运动控制一体机在视觉SCARA天地盖贴合的解决方案
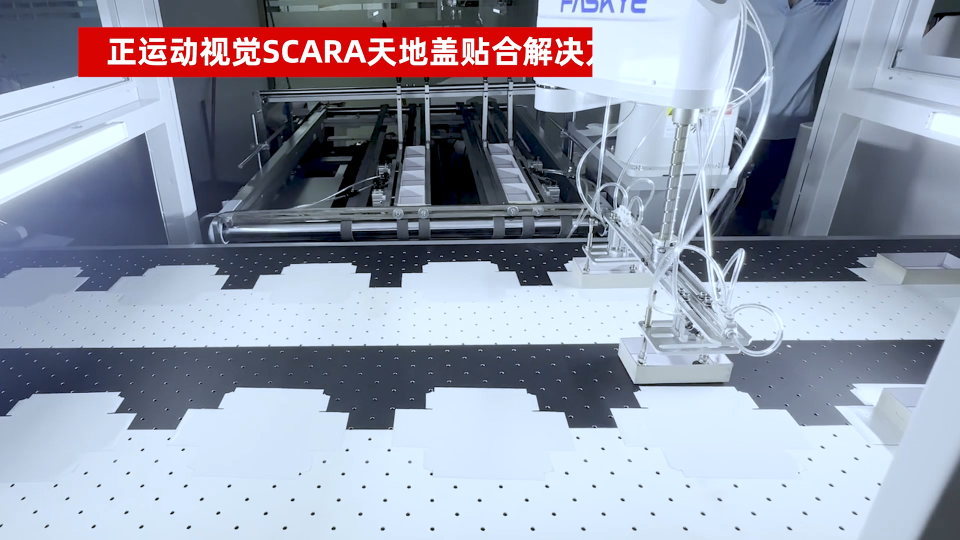
视觉SCARA天地盖贴合运行视频可点击→“视觉SCARA天地盖贴合解决方案”查看。
正运动视觉SCARA天地盖贴合解决方案设计
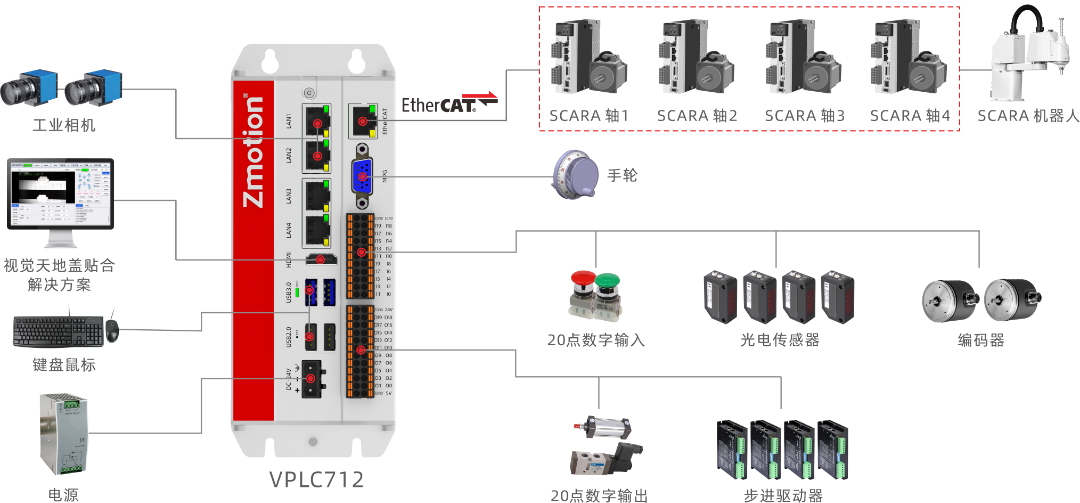
20DO:吸气、吹气、铲刀、压盒、夹盒,三色灯蜂鸣器等;
EtherCAT接口:接EtherCAT总线驱动器,控制SCRAR机械手,等其它控制轴;
4路单端脉冲输出、2路本地差分脉冲轴:接步进/脉冲驱动器;
RS232通讯接口:第三方产品通讯;
EtherNET接口:千兆网口,接Gige面阵相机,实现视觉定位贴合应用。
机器视觉与运动控制实现过程
▌机器视觉
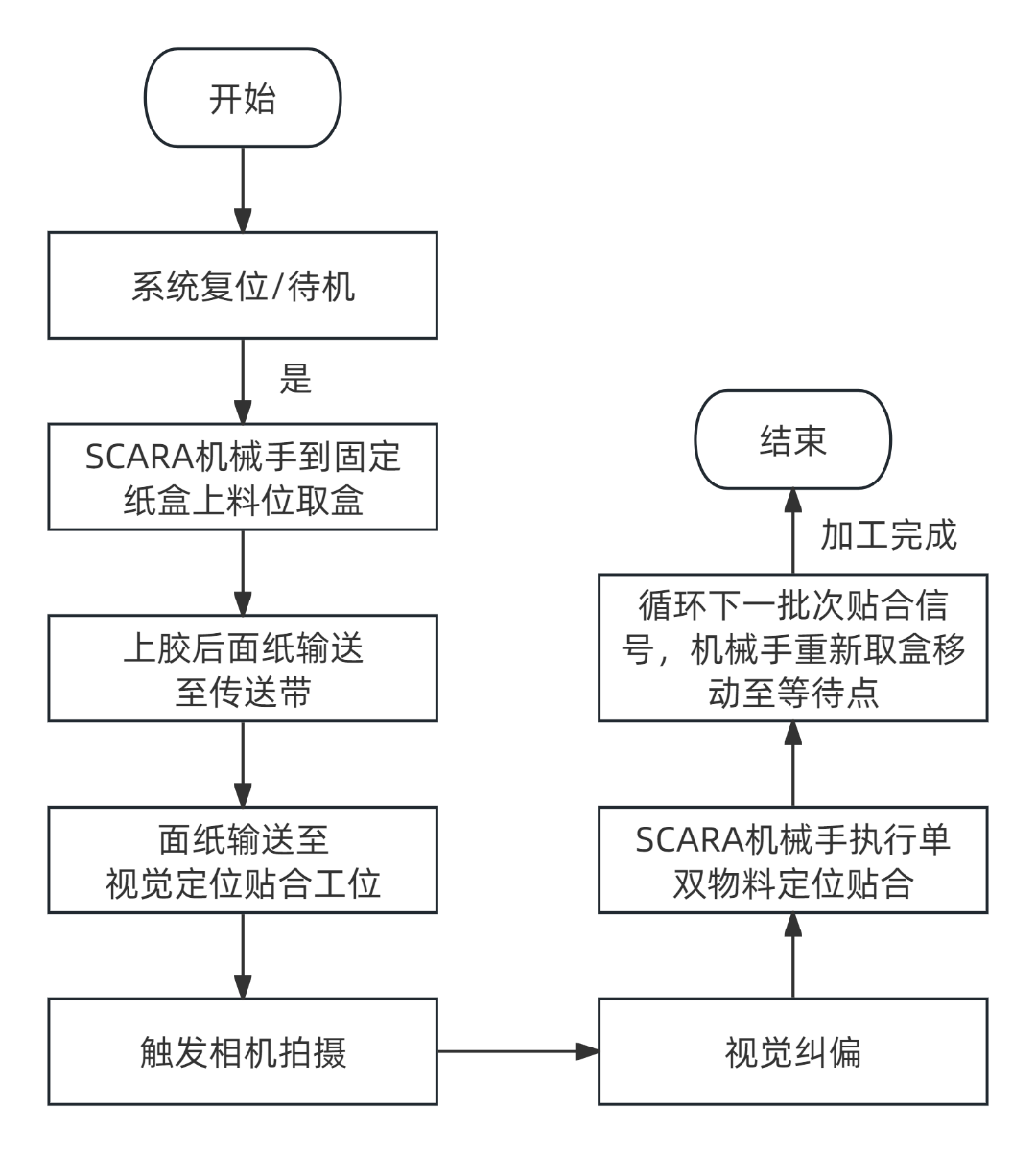
经过上胶的面纸随着传送带输送至相机下方,触发相机拍照,进行视觉拍照定位,获取面纸位置坐标和角度信息,并在坐标系数校准完成后,向SCARA机械手输出面纸的实际坐标信息。随后,机械手从固定的纸盒上料位抓取纸盒,并引导机械手执行高精度的纸盒天地盖定位贴合作业。
▌运动控制
上胶后的面纸经传送带输送至指定天地盖定位贴合工位时,控制器通过IO信号触发相机进行拍摄,相机完成面纸的拍摄和处理后,SCARA机械手根据视觉坐标数据,沿预设加工轨迹移动。
在整个过程中,控制器对SCARA机械手各关节轴进行实时位置、速度、加速度、吸力等参数的同步控制,防止抓取过程中产生滑移或偏移,并实现更平滑的运动轨迹,完成高精度贴合动作。
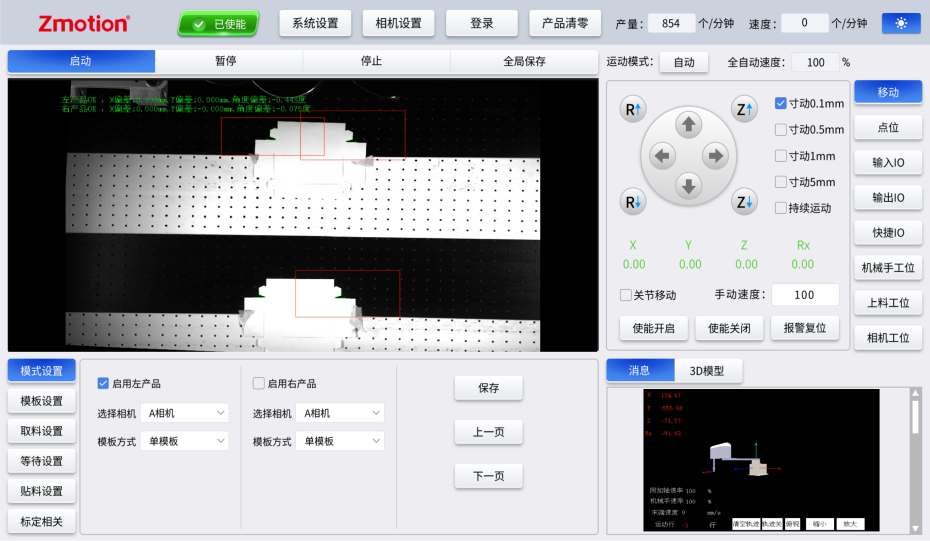
视觉SCARA天地盖贴合工艺流程
方案应用优势
成本效益与空间优化:高度集成机械手、运动控制、机器视觉、IO控制等,无需额外配置工控机,节约成本并减少安装空间,缩短项目周期与提高技术难度处理速度;
高精度贴合:配合高精度视觉采集系统,贴合精度可达±0.15mm,避免因人工操作导致的贴合偏差或返工,提高效率和良品率;
自动化程度高,降低用人成本:人机交互界面简单易用,拖拽式编程和可视化设置降低培训难度,减少对操作人员的依赖;
柔性生产,快速换线:可覆盖不同纸盒或面纸尺寸规格的贴合作业,满足多样化、定制化生产。当工艺要求变化时,仅需调整参数程序,无需更换硬件等。
解决方案硬件配置
| 产品类型 | 产品型号 | 厂家 | 数量 |
| 机器视觉运动控制一体机 | VPLC712 | 正运动 | 1 |
| 运动控制实时内核 | MotionRT7 | 正运动 | 1 |
| 上相机 | 2000W像素 | - | 1 |
| 上相机光源 | 两侧条光 | - | 1 |
| 光源控制器 | - | - | 1 |
| SCARA机械手本体 | - | - | 1 |
| 总线伺服驱动器 | - | - | 4 |
| 其他配件 | - | - | - |
02 VPLC7系列机器视觉运动控制一体机
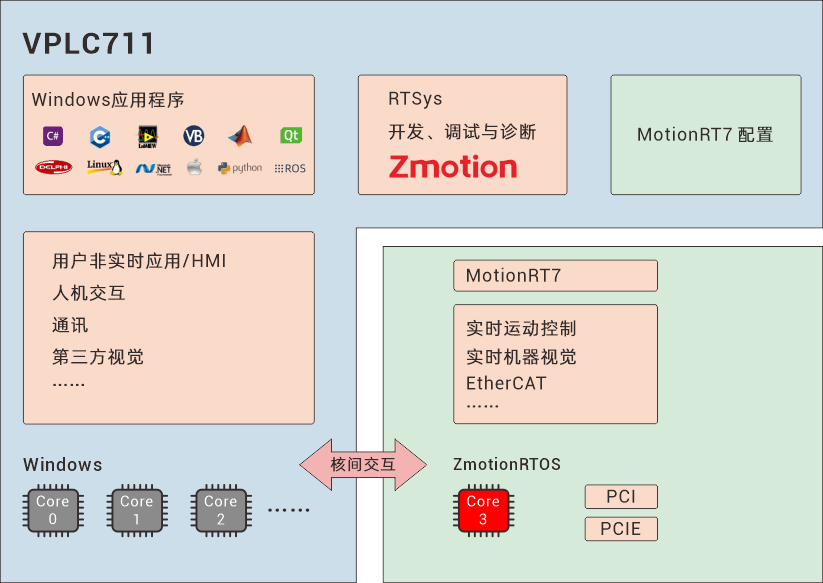
基于x86架构的EtherCAT总线视觉运动控制器,跨平台部署,支持脱机运行,内置丰富的视觉和运动控制功能,大幅简化配置流程。核内数据交互速度快,显著降低时间和成本投入,提高项目实施效率。
安装与拆卸过程便捷,占地空间小,能与其他控制单元部件(如伺服驱动器、传感器、编码器、控制阀等)和MES系统无缝集成。提供一体化开放式IPC形态的实时软控制器/软PLC集成的机器视觉+运动控制解决方案。

可选6-64轴运动控制(脉冲+EtherCAT总线),EtherCAT周期最快可达250us;
支持多种通讯接口,方便客户集成现有系统中;
搭载MotionRT7,内核交互,指令调用快至us级,支持第三方视觉软件;
多核并行运算,能够高效处理运动控制,机器视觉等自动化设备核心任务;
板载20路通用输入(其中10路为高速输入),20路高速输出;
支持EtherCAT冗余功能,解决单点故障停机,自动诊断并持续运行,增强系统可靠性,简化维护工作。
VPLC712产品宣传视频可点击→“【紧凑型机器视觉运动控制一体机】x86平台实时Windows机器视觉EtherCAT运动控制器VPLC712”查看。
03 RTFuse开放式视觉运动控制解决方案
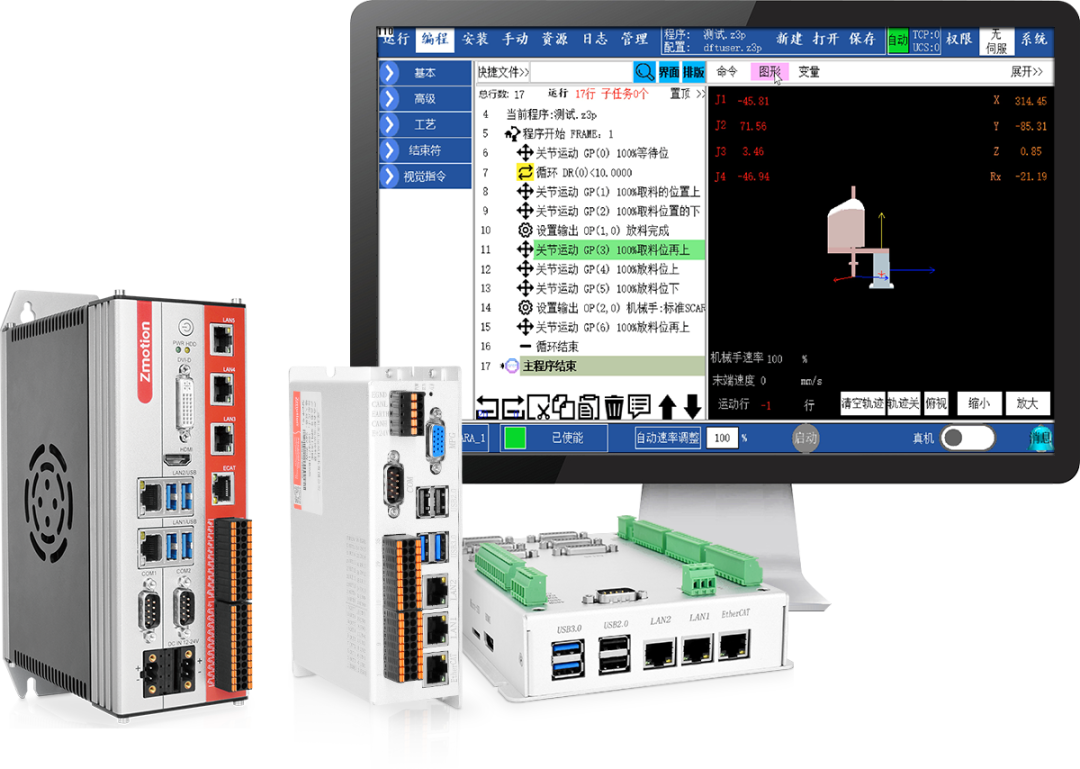
RTFuse开放式视觉运动控制解决方案是一款基于VPLC视觉运动控制一体机为基础,所研发的可拖拽式视觉运动控制简易编程平台与各细分行业所拓展相应的视觉运动控制工艺包。
在降低用户使用门槛的同时,也能够满足技术要求较高的行业应用工艺需求,为客户提供一站式的视觉运动控制的解决方案。
▌技术门槛低
可视化界面,拖拉拽中文组态编程,经培训轻松上手可视化界面。
▌项目开发周期快
流程图化编程,无需编写大量代码,从上至下执行项目控制流程。
▌软硬件集成度高
集成EtherCAT总线、脉冲混合控制,机器视觉、运动控制、集软硬于一体易于设备调试与排除问题,同时支持工具功能拓展。
▌支持30+机械手类型
4轴模组、SCARA机械手、DELTA机械手、直角坐标机械手、6关节等。
审核编辑 黄宇
-
运动控制器
+关注
关注
2文章
405浏览量
24758 -
机器视觉
+关注
关注
162文章
4387浏览量
120427 -
一体机
+关注
关注
0文章
905浏览量
32747 -
运动控制
+关注
关注
4文章
584浏览量
32899 -
SCARA
+关注
关注
0文章
51浏览量
13338
发布评论请先 登录
相关推荐



基于VPLC711的曲面外观检测XYR运动控制解决方案
水肥一体机远程监控解决方案





 工商网监
工商网监
评论