 昱感微创始人&CEO蒋宏受邀出席“聚焦多模态雷视融合感知技术”学术沙龙,共探AI机器视觉未来
昱感微创始人&CEO蒋宏受邀出席“聚焦多模态雷视融合感知技术”学术沙龙,共探AI机器视觉未来
2025年1月7日,由中新广州知识城开发建设办公室、西安电子科技大学广州研究院以及海丝产教融合协同创新中心共同组织的“聚焦多模态雷视融合感知技术”的学术沙龙在西安电子科技大学广州研究院成功举办。昱感微创始人&CEO蒋宏受邀出席演讲,与广研院师生分享了《“多维像素”多模态雷视融合感知技术——赋能AI机器视觉超级感知能力》主旨报告。

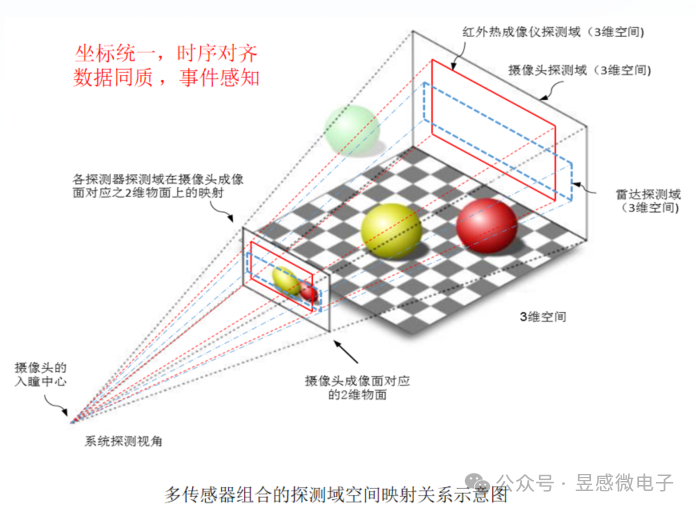
昱感微采用最前沿的多维像素多模态前融合技术,将可见光摄像头、红外摄像头、4D毫米波雷达/激光雷达的探测数据在前端(数据获取时)融合,并将各传感器的探测数据“坐标统一、时序对齐”,最后以“多维像素”的数据格式输出;昱感微的核心技术创新——“多维像素”,它是指在可见光摄像头像素信息上加上其它传感器对于同源目标感知的信息:图像数据+雷达探测数据+红外传感器探测数据叠加,以摄像头像素为颗粒度组合全部感知数据,形成多模态融合感知数据组合。在高分辨率宽动态的可见光摄像头感知基础上,雷达提供目标的距离、速度维度的精准感知还可以帮助可见光摄像头克服天气光线的影响,摄像头的图像又为雷达增添了语义信息,进一步提高雷达点云的置信度以及感知信息量;远红外摄像头有针对性的目标热辐射图像感知则赋予了自动驾驶系统卓越的夜视能力。昱感微“多维像素”超级摄像头就像是一双比人眼更敏锐的眼睛,看到的不仅仅是一幅幅二维的图像,还有更多维度的精确信息(目标的距离/速度/3D空间位置/温度/材质等),形成完整的多模态“视觉语言”,令自动驾驶系统可以精确全面地感知道路上各种状况。(详情可参见昱感微“多维像素”多模态融合感知展示)
分享结束后,与会师生积极提问,现场气氛热烈而有序。未来,随着AI技术的不断进步和应用场景的不断拓展,多模态感知技术将在AI机器视觉领域发挥更加重要的作用。昱感微很荣幸能成为多模态感知技术的先行者,也期待有更多的合作伙伴加入到这一领域来,一起构建合作共赢的生态链,为客户和彼此创造更高价值。

审核编辑 黄宇
-
AI
+关注
关注
87文章
31153浏览量
269479 -
自动驾驶
+关注
关注
784文章
13877浏览量
166611
发布评论请先 登录
相关推荐
“多维像素”多模态雷视融合技术构建自动驾驶超级感知能力 上海昱感微电子创始人蒋宏GADS演讲预告
超越人类视觉!昱感微“多维像素”多模态超级摄像头方案产品赋能超凡感知力

名单公布!【书籍评测活动NO.51】具身智能机器人系统 | 了解AI的下一个浪潮!


澎峰科技受邀出席国家超算互联网生态沙龙
中微公司受邀出席第十八届全国MOCVD学术会议
强强联合!深视智能携手Zebra公司成功举办“3D机器视觉+AI融合技术”研讨会
银牛微电子3D视觉感知方案赋能小米CyberDog系列仿生四足机器人
机器人基于开源的多模态语言视觉大模型






 工商网监
工商网监
评论