 爱普生M-G366PDG适用于商用车自动驾驶领域
爱普生M-G366PDG适用于商用车自动驾驶领域
商用车行业正在经历由自动驾驶技术驱动的革命性变化。因为具有工作环境路况单一、路线固定、司机工作强度高、商业价值大的特点,商用车自动驾驶被预测将率先实现商用化落地。自动驾驶定位要求车辆对自车位姿的估计足够精准,精准意味着需要在厘米级别上测量位置。
在商用车自动驾驶领域,IMU的性能直接关系到车辆导航的准确性和系统的稳定性。如果IMU的分辨率不足,将无法捕捉到车辆微小的运动变化,导致导航误差累积过大,影响车辆的定位精度。而稳定性差的IMU在面对温度变化、振动等外界干扰时,其测量结果容易出现波动,这不仅会影响车辆的行驶安全,还可能导致自动驾驶系统频繁退出,严重影响驾驶员的使用感受。
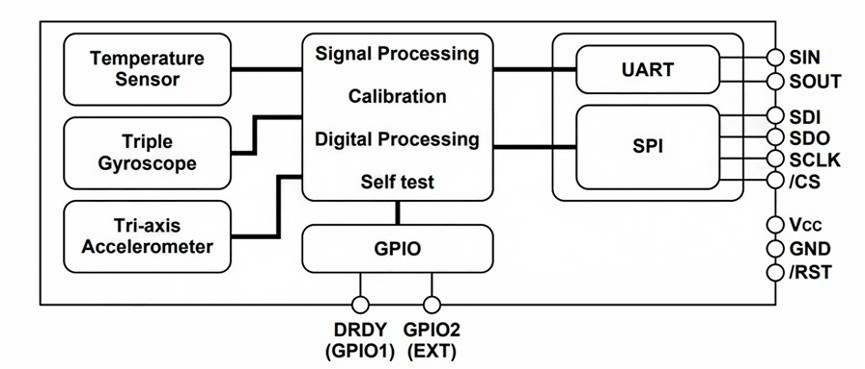
EPSON的惯性测量单元M-G366PDG0,以其高分辨率和高稳定性的特点,为商用车自动驾驶提供了一个理想的解决方案。该IMU的六自由度设计,使其能够全面捕捉车辆的姿态和运动信息。三轴陀螺仪达到了战术级陀螺仪标准,量程可达到 ±450 °/s,零偏稳定性低至1.2°/h,角随机游走仅为0.08°/√h,这意味着它即使在长时间的运行中,也能保持极高的测量稳定性。三轴加速度计满足的最大量程可达±16 G,标称带宽达到333Hz,完全可以满足车辆自动驾驶的定位需求,能够在各种复杂环境下保持高精度的测量。
该惯性测量单元还支持SPI和UART接口,便于与车辆的其他系统集成,实现高效的数据通信;也配备了自检功能,可以检查陀螺仪和加速度计的输出是否在预定的范围内正常工作。这不仅增强了系统的可靠性,也使得维护更为简单。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
爱普生
+关注
关注
0文章
324浏览量
22174 -
IMU
+关注
关注
6文章
316浏览量
45805 -
自动驾驶
+关注
关注
784文章
13877浏览量
166615
发布评论请先 登录
相关推荐
中科慧眼再获多家头部商用车主机厂量产定点
近日,中科慧眼高阶辅助驾驶解决方案再获多家头部商用车主机厂量产定点。这不仅标志着中科慧眼智驾解决方案牢牢占据了轻卡轻客智能化转型高地,同时进一步抢滩重卡优化升级的战略风口,位居商用车智驾领域
爱普生M-G366PDG惯性测量模块选型
爱普生M-G366PDG是一款高性能的惯性测量单元(IMU),13位PN码位X2G0001910001。标准包装的15位编码是X2G000191000100。具有小尺寸、轻重量、低
发表于 09-20 17:14
•0次下载
爱普生M-G330PDG0惯性测量模块选型
爱普生M-G330PDG0是一款高性能的惯性测量单元(IMU),完整型号为M-G330PDG0,产品编码为:X2G000201000100。爱普生

智驾科技MAXIEYE宣布成立商用车智驾子品牌「阡途」
2024年7月30日,AI驱动的自动驾驶服务商——智驾科技MAXIEYE宣布成立商用车智驾子品牌「阡途」,定位MAXIEYE旗下商用车自动驾驶创新单元,致力于成为
FPGA在自动驾驶领域有哪些优势?
FPGA(Field-Programmable Gate Array,现场可编程门阵列)在自动驾驶领域具有显著的优势,这些优势使得FPGA成为自动驾驶技术中不可或缺的一部分。以下是FPGA在自
发表于 07-29 17:11
中科慧眼智能驾驶技术获市场高度认可,引领商用车智驾新趋势
近日,智能驾驶技术领域的佼佼者中科慧眼再次获得知名商用车主机厂的项目量产定点,标志着其在智能驾驶技术领域的实力得到了市场的广泛认可。作为一级
爱普生IMU系列新品——M-G366PDG和M-G330PDG
自2011年首次推出以来,爱普生的IMU已用于一系列客户应用,从精准农业(GNSS2)和无人机到相机和天线平台的振动控制和稳定性,卓越的性能和质量为其赢得了良好的口碑。我们之前也介绍过IMU系列

阜时科技近期签订商用车自动驾驶全固态激光雷达批量订单
阜时科技战略合作的某头部激光雷达(LiDAR)公司,签订商用车自动驾驶全固态激光雷达批量订单,近期将陆续交付。
东软睿驰李源:商用车自动驾驶产品转型升级之路
近日,由中国汽车工业协会主办的2024中国商用车论坛在湖北省十堰市隆重举办,本届论坛以“新步伐•新成效•新提高,助力商用车产业高质量发展”为主题,聚集主管部委领导、行业专家、主流商用车企高层、供应链企业代表,共商共研共话中国

东风公司实施商用车“跃升工程”,打造世界一流的商用车企业
3月28日,东风公司宣布实施商用车“跃升工程”,成立商用车事业部,推动商用车业务一体化运营,集中优势资源,做强做优做大商用车业务,打造世界一流的商用
爱普生M-G365/M-G366 MEMS六轴陀螺仪替代光纤陀螺仪
爱普生M-G365/M-G366是一款性能达到光纤陀仪(FOG)级别的高性能性测量装置,作为新一代IMU标准,安装简单,具有新的姿态角输出功能并支持各种应用,并且具有扩展卡尔曼滤波器的高速DSP能以

爱普生(EPSON)拓展其G系列IMU产品线,开发M-G366PDG和M-G330PDG
M-G366PDG和M-G330PDG两款新的标准型号和基础型号。爱普生已经在2023年春季开始量产。就让南山电子小编通过本文来带大家一起了解一下M-G366PDG和

M-G366PDG0规格书
°C至+85°C、电源电压:3.3 V等特点。适用于自动驾驶车辆导航系统、振动控制和稳定、指向和跟踪系统等场景,为各种应用场景提供了更加精确的控制和稳定性。体积小
发表于 01-12 09:32
•0次下载





 工商网监
工商网监
评论