 自主水下航行器多分支网络光学导引定位方法
自主水下航行器多分支网络光学导引定位方法
以下文章来源于中国科学信息科学,作者 SCIS
研究意义
为了提高自主水下航行器(Autonomous Underwater Vehicle, AUV)末端光学导引回收的精度,本文提出了一种可靠的导引回收方法,旨在为AUV在能源补充、数据传输和指令下达等方面提供更快的解算速度、较低的算力功耗需求以及较少的能量消耗。
本文工作
本文搭建了基于多象限测角的光学导引定位硬件系统,提出了多分支回归网络的AUV光学导引定位方法(图1)。首次将深度网络引入多象限测角的光学导引定位位置解算任务中,设计了多分支结构的位置解算回归网络,研究了数据驱动的多维度定位约束训练方法, 构建了水下光学导引定位系统的物理几何关系,实现了光学导引硬件与算法的一体化设计。通过解算多象限光电探测器采集的导引灯偏角数据,获取了AUV与导引灯的相对位置,实时输出AUV的即时位置坐标,完成了海试验证。
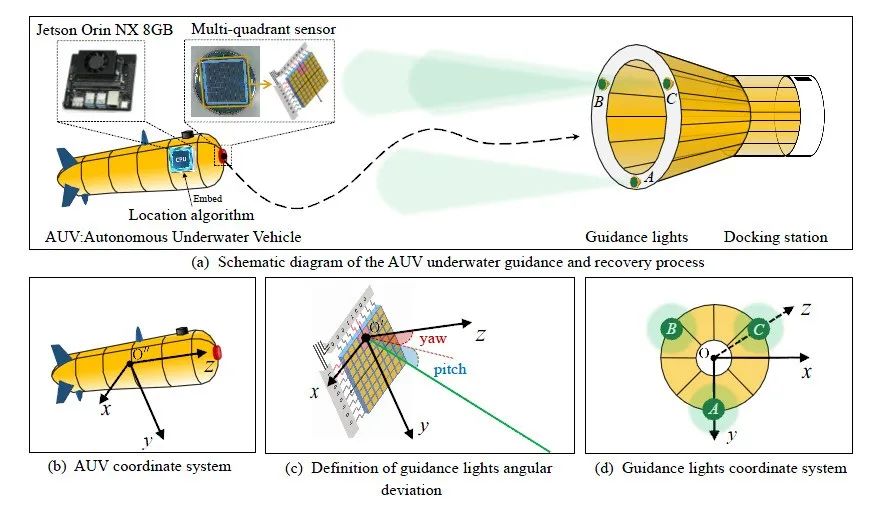
图1 AUV导引定位系统示意图
创新点:
导引硬件与算法一体化设计。为了实现水下光学导引大视角的高精度定位,本文采用了多象限光电探测器,分析导引灯组排布与AUV的物理几何关系,进而建立了光学导引偏角-位置的数学模型。从导引灯的几何排布角度出发,在理论上证明了使用三个非共线排布的导引灯可以确保导引灯偏角数据与AUV位置 (简称偏角-位置) 的一一对应关系, 是保证在算法层面产生唯一位置真值解的重要前提条件。
多分支结构的位置解算回归网络。为了提升模型的表示能力,本文采用深度学习方法建模,设计了多分支结构的位置解算回归网络(图3)。将通过多象限光电探测器获取的导引灯偏角信息进行AUV位置解算的任务视为回归问题,采用编解码器结构,提高了位置解算精度和速度。
多维度的空间位置约束目标函数。为了更高效地指导网络模型参数优化,本文从方向、距离、坐标三个维度设计网络模型目标函数,建立了多维度空间定位精度约束,进一步提高了网络模型的解算精度和泛化能力。
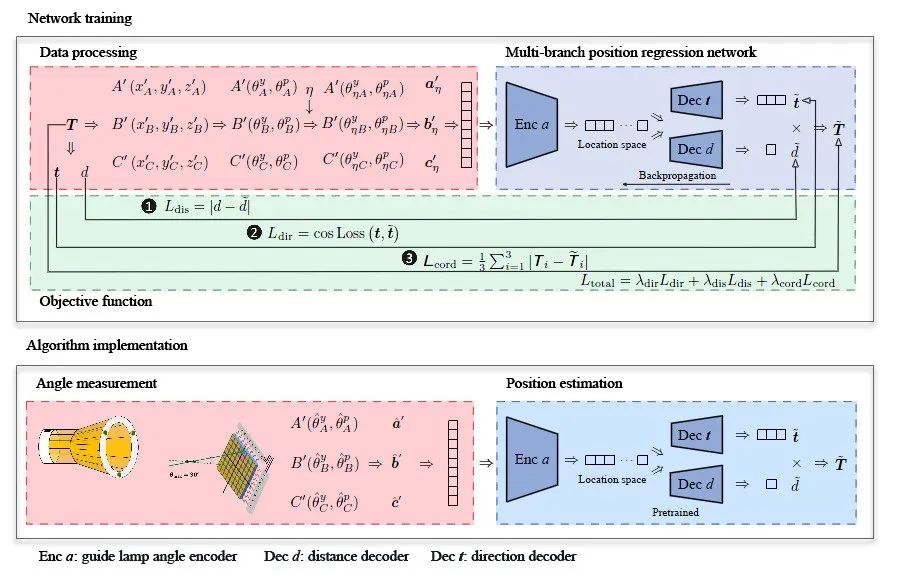
图3 AUV多分支网络光学导引定位方法技术路线图
实验结果
在导引回收任务中,全面评估定位精度对于确保方法效果至关重要,通过在不同距离的定位精度实验。展示本文研究方法在位置解算的准确性。本文方法在 0.8m 至 20m 范围内的坐标定位精度实验数据如图4所示。可以看出,绝对坐标误差随着距离的增加而增加,由统计分析可得,其均值 58.292mm@0.8 ~ 20m,标准差为 43.347mm@0.8 ~ 20m.
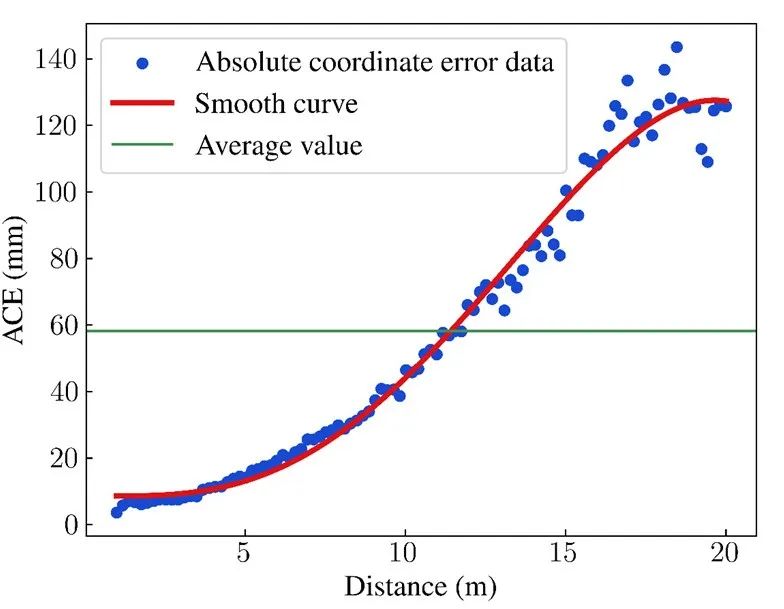
图4 不同距离的定位精度分布图
为了直观展示多分支网络光学导引定位方法的位置坐标解算精度,设计仿真轨迹以进一步测试,AUV 坐标预测轨迹的可视化结果(图6)。轨迹仿真实验中采样了 80 个点,其坐标解算的绝对坐标误差均值为 41.256mm@0.8 ~ 20m,绝对坐标误差最大值为 143.847mm@0.8 ~ 20m,绝对坐标误差最小值为 3.276mm@0.8~20m。
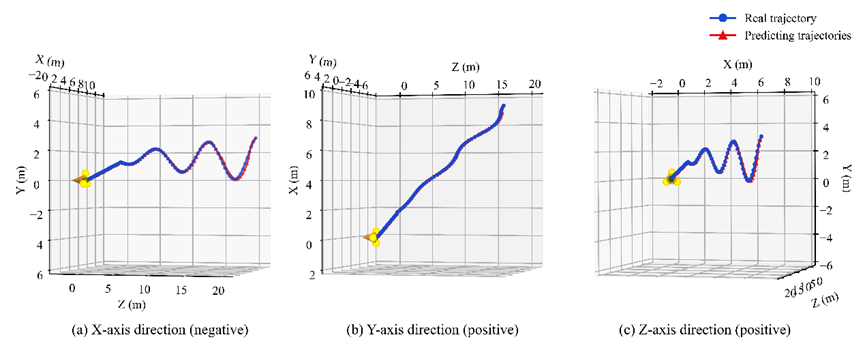
图6 轨迹预测结果图
在相同的验证条件下,同样使用物理仿真随机生成的 10 万组偏角-位置数据,使用多项式回归算法、支持向量回归算法、决策树算法和随机森林回归算法,与多分支结构的位置解算回归网络算法在 0.8~20m 的导引范围内对定位坐标精度进行比较。与传统回归算法相比,多分支结构的位置解算回归网络的绝对坐标误差均值仅为58.292mm,展现出更高的定位精度。这一结果表明了多分支回归网络在特征提取和非线性建模上的优势, 尤其在处理复杂定位任务时,表现出了更高的定位精度。
为了验证多分支网络光学导引定位方法的位置解算精度,本研究团队在自然资源部北海海洋技术中心海港港池开展了海试验证。三条轨迹的坐标真实值和预测值结果如图9所示。
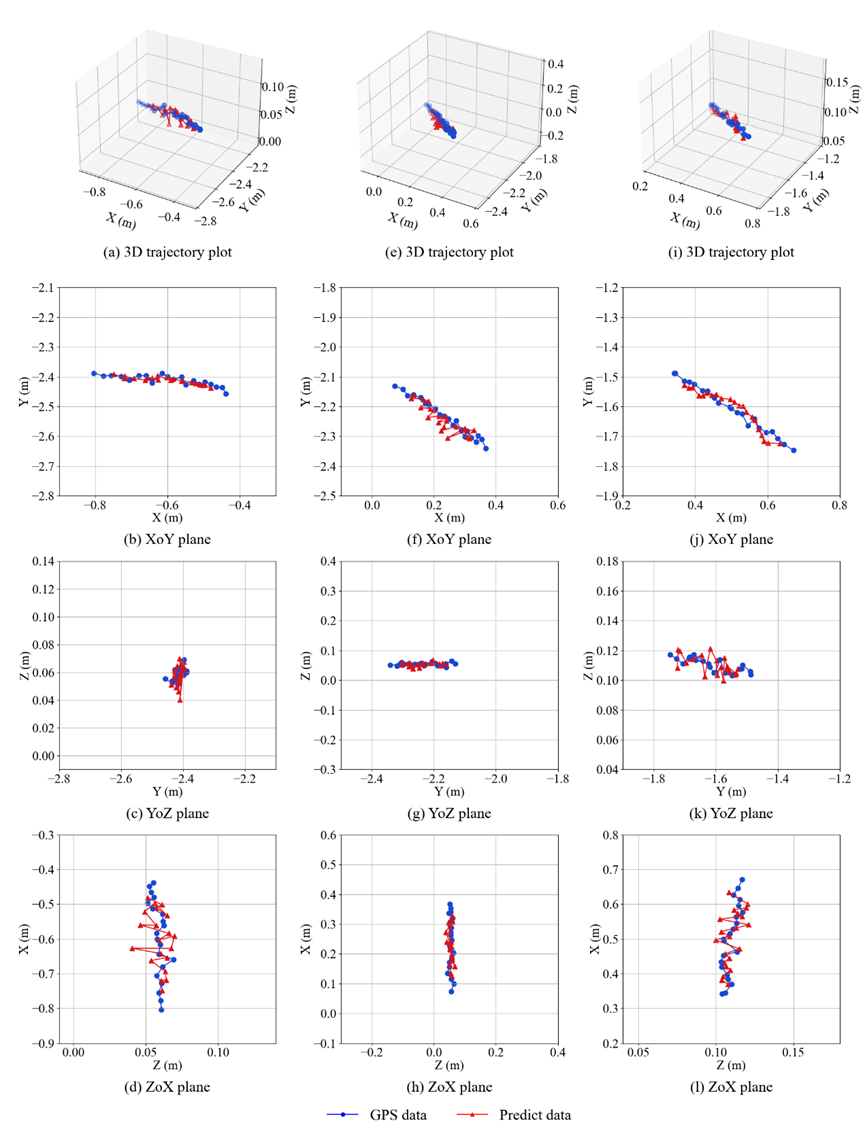
图9 海试实验轨迹预测结果图
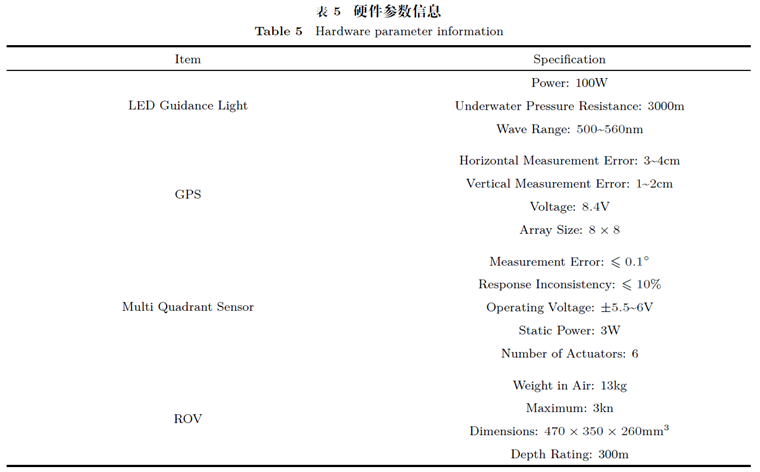
通过对绝对坐标误差进行计算和统计,得到预测轨迹点与采集的 GPS 轨迹点平均绝对坐标误差在 35.102mm@1 ~ 3m,而仿真实验的平均误差仅为6.646mm@1~3m,与海试数据存在差距。这是由于海试误差除了算法本身存在的误差以外,主要是由 GPS 的测量误差和多象限光电探测器的测量误差造成,如表5中所示。因此,海试中的误差积累难以避免导致了仿真和实验存在定位误差差异。同时,综合 GPS 和多象限光电探测器的测量误差来看,海洋试验的误差仍在合理范围内,验证了该方法在海洋环境中仍可以实现预期的精确定位。
-
光学
+关注
关注
4文章
762浏览量
36488 -
定位
+关注
关注
5文章
1349浏览量
35533 -
水下航行器
+关注
关注
0文章
16浏览量
8668
原文标题:TeleAI提出自主水下航行器光学导引定位新方法
文章出处:【微信号:晓说通信,微信公众号:晓说通信】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
水下航行器模拟平台系统的总体架构是什么?
运载平台怎么实验水下航行器的功能?

基于Vega Prime实时视景仿真水下航行器应用
使用无人驾驶船部署自主水下航行器的新系统
水下航行器自主巡航的路径规划算法实现


DARPA引领无人水下航行器(UUV)电源技术的进步
PyTorch教程8.4之多分支网络(GoogLeNet)

水下航行器电机的SiC MOSFET逆变器设计






 工商网监
工商网监
评论