 deepin 23+树莓派让小车动起来
deepin 23+树莓派让小车动起来
deepin 23 +树莓派还有啥新玩法?
前言
继我们之前发布的树莓派运行 deepin 23 系统教程后,此次我们将深入探索如何借助树莓派实现与硬件的交互,进而精准控制小车的运行。
硬件准备
以下是所需的硬件清单,看看自己都备齐了吗?
树莓派 4b
TB6612FNG 电机驱动模块
安装环境
系统:deepin 23
配置 Python 环境
sudo apt install python3-pip python3-venv python-dev-is-python3 python3 -m venv venv source venv/bin/activate pip3 install bottle rpi.gpio
安装 gpio 服务
sudo apt install pigpiod sudo systemctl enable pigpiod sudo systemctl start pigpiod
硬件安装
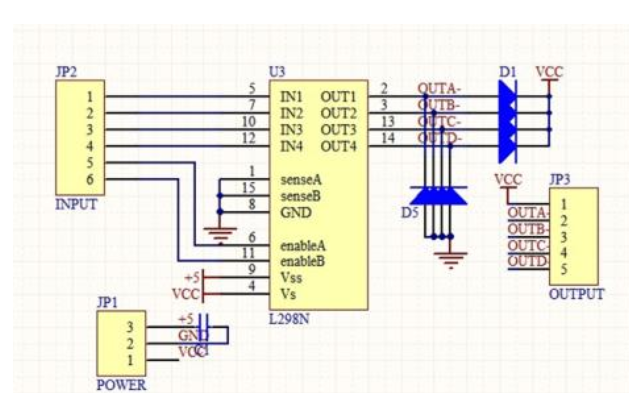
参考图如下:
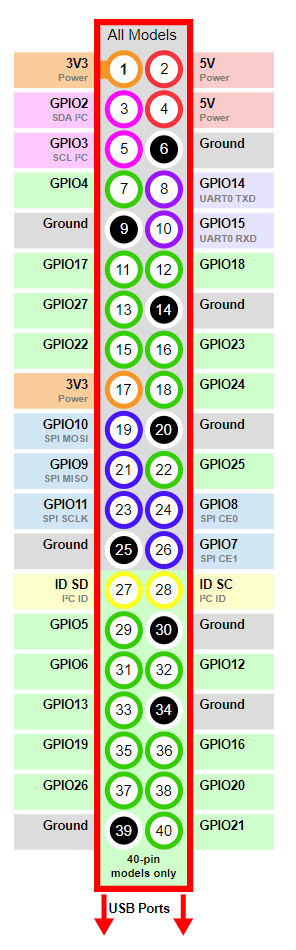
| TB6612 | 树莓派 | 电机 | 说明 |
| PWMA | 18 | A 电机控制信号输入 | |
| AIN2 | 27 | A 电机输入端 2 | |
| AIN1 | 17 | A 电机输入端 1 | |
| STBY | +3.3V | 驱动器的总开关,STBY 高电平时工作,低电平时停止。 | |
| BIN1 | 22 | B 电机输入端 1 | |
| BIN2 | 23 | B 电机输入端 2 | |
| PWMB | 19 | B 电机控制信号输入 | |
| GND | Power 接入外部电源负极 | ||
| VM | Power(电机驱动电压输入端,从外部电源正极输入) | ||
| VCC | +5V | Power(逻辑电平输入端,从树莓派接入5V) | |
| GND | GND | Power 接入树莓派 GND | |
| AO1 | A 电机输出端 1 | 电极朝外,左轮下方电极。 | |
| AO2 | A 电机输出端 2 | 电极朝外,左轮上方电极。 | |
| BO2 | B 电机输出端 2 | 电极朝外,右轮上方电极。 | |
| BO1 | B 电机输出端 1 | 电极朝外,右轮下方电极。 |
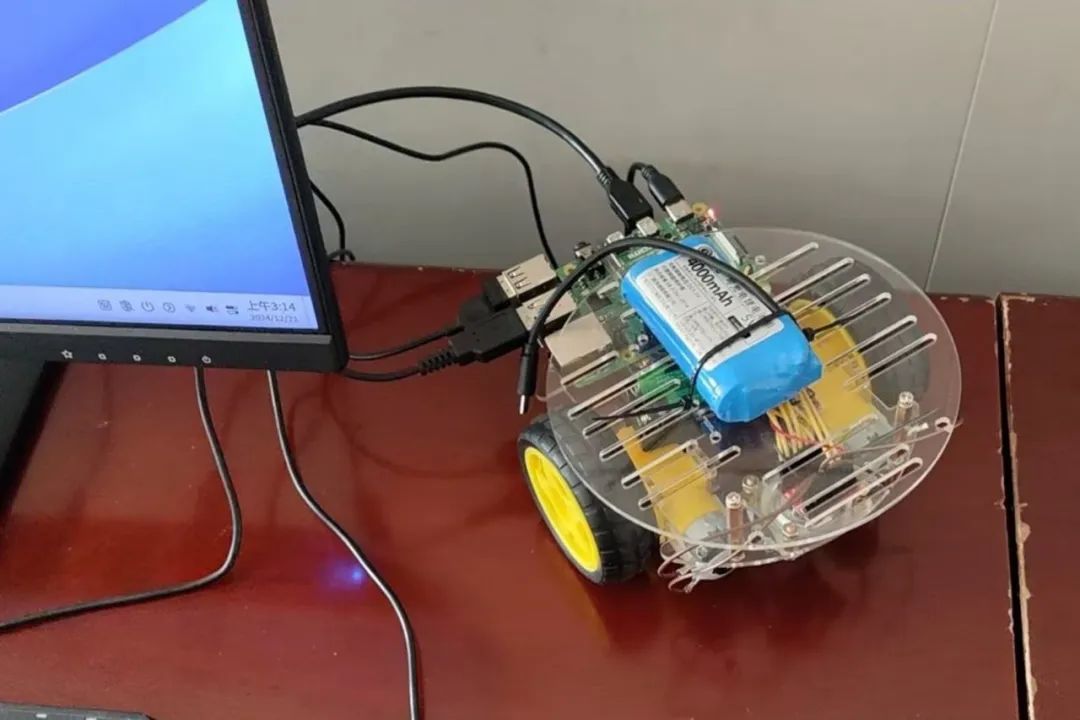
这里使用 Type-C 接口可充电的 5V 锂电池给树莓派供电,电机驱动模块使用电池盒放入 2 节 5 号电池供电。
运行程序
克隆源码
git clone git@github.com:chenchongbiao/Raspberry-Car.git
调用 gpio 需用 root 权限。这里直接切 root 用户运行程序。
sudo su source venv/bin/activate python3 Start.py
运行成功后,通过浏览器输入 http://ip:8088
这里的 ip 为树莓派的ip 地址。可以通过点击网页上的按钮操控树莓派小车。
参考资料
原作者项目:https://github.com/valieo/Raspberry-Car
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
硬件
+关注
关注
11文章
3424浏览量
66753 -
小车
+关注
关注
0文章
55浏览量
21115 -
树莓派
+关注
关注
118文章
1718浏览量
106182
原文标题:deepin 23 + 树莓派 让小车动起来!
文章出处:【微信号:linux_deepin,微信公众号:深度操作系统】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
让PMSM简单的动起来的话,需要调用哪些头文件?
让PMSM简单的动起来的话,需要调用那些头文件,最好解释下作用。手头有控制器,但代码太多是在看不明白。先谢过各位大佬了
发表于 04-26 07:34
请问怎么使无刷电机动起来,就单单动起来
本人是51单片机学习者,刚刚接触无刷电机,但是连怎么让它动起来都搞不明白,各位可以分享一下吗?不胜感激啊,我现在就想让它动起来先而已
发表于 04-24 00:55
【NanoPi M2申请】创客神器NanoPi M2各类系统以及控制GPIO端口评测
申请理由:本人是一本科毕业生研究树莓派时间有小一年了,相关的各类系统几乎玩了一遍,身边同学也有些人被带动起来,近期发现nanopi已经支持deepin系统了,我电脑装的是
发表于 04-08 14:37
【Landzo C1试用体验】+第二篇 :动起来,生活才更精彩!
经过不懈努力,终于完善了组装,现在可以上机器人小车动起来了,动起来,才有美感家成就感。下面上图,本来要上传视频的,但是不怎么到怎么弄,要先传到优酷,在链接网址好像。下次有空再搞视频上传。在这里说两个
发表于 06-02 18:55
如何让智能小车动起来?怎样去编写其程序?
如何让智能小车动起来?怎样去编写其程序?怎样去选择智能小车的硬件?智能小车的硬件是如何进行连接的?如何从零开始用51单片机去实现智能
发表于 07-14 06:48
使用树莓派设计智能小车教程之树莓派手机PC控制小车的实验免费下载
本文档的主要内容详细介绍的是使用树莓派设计智能小车教程之树莓派手机PC控制小车的实验免费下载。
发表于 06-24 08:00
•22次下载

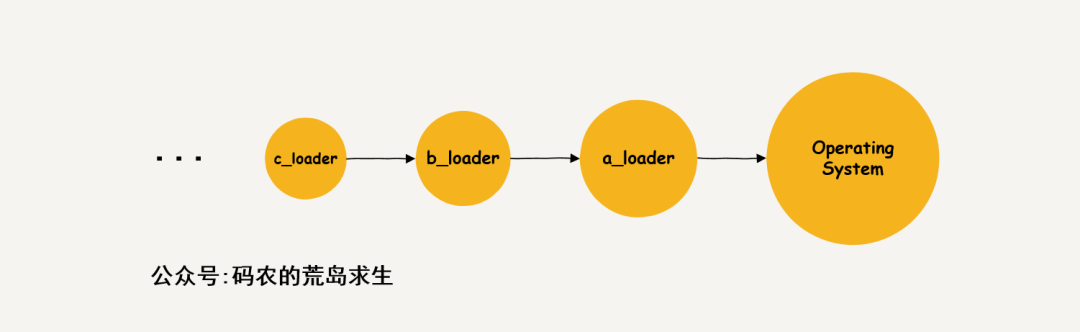
你知道操作系统是如何启动起来的吗
操作系统被称为“第一个程序”,the first programme,原因很简单,只有当操作系统启动起来后才能运行我们编写的程序,那么你有没有想过这个问题:操作系统是怎样启动起来的呢? 实际上这个过程就像发射火箭一样有趣 ,看完这篇你就明白啦。
BeagleBone AI-64、Servo Cape和让电机动起来
电子发烧友网站提供《BeagleBone AI-64、Servo Cape和让电机动起来.zip》资料免费下载
发表于 07-12 10:51
•0次下载

步进电机如何让动起来?步进电机转动原理
42步进电机的步距角为1.8°,是由定子和转子的齿数共同决定的,定子有48齿,转子有50齿,具体是怎么算的,感兴趣的同学可以自行学习,今天的重点是让步进电机如何让动起来。
发表于 04-01 10:40
•3170次阅读





 工商网监
工商网监
评论