 涂鸦运动子系统实现突破性创新!毫秒级贴边+高智商清扫重新定义移动机器人
涂鸦运动子系统实现突破性创新!毫秒级贴边+高智商清扫重新定义移动机器人

一、移动机器人的核心技术有多难?
在智能化浪潮推动下,可移动智能硬件系统的应用正从服务于家庭的清洁机器人,逐步扩展至工/商业服务领域。而要想实现这类系统在精细场景下的灵活应用,核心技术就在于能够实现自主移动与动态决策能力,对技术革新的要求不仅是多维度的融合,而且更复杂,比如:
需要通过激光雷达、视觉传感器与惯性导航模块,实现环境感知与SLAM实时定位;
基于深度学习与强化学习的路径规划算法,支持动态避障与最优路线决策;
高精度电机控制与低功耗能源管理,能够有效保障稳定续航与灵活运动;
5G、边缘计算等技术实现云端协同,赋予设备远程管理与自主进化能力。
可以说,可移动智能硬件系统正以【感知-决策-执行】的闭环能力重塑生产力边界。但由于技术难度的复杂性,传统硬件企业常面临双重困境:一方面需承担千万级研发投入与过长的开发周期,另一方面受限于因算法工程化能力薄弱导致的商业化进程迟滞。
二、涂鸦运动子系统的变革性创新
为突破行业共性技术瓶颈,涂鸦智能基于 TuyaOS 架构打造了运动控制子系统,帮助开发者降低移动智能硬件的开发门槛。它继承了 TuyaOS 的一系列优点,如强大的跨平台兼容、低代码开发硬件传感以及电机驱动等,不仅提高了开发效率,而且成功构建覆盖感知-决策-执行的全栈式机器人技术矩阵。开发者可直接进行一站式应用,目前已成功帮助各品牌客户实现多品类移动智能机器人的规模化落地。
该方案的最大优势就在于,涂鸦在最小芯片资源中,利用运动子系统的跨平台性能,实现了核心技术的突破,包括低成本的移动定位算法、规划算法、控制算法:
涂鸦在 SLAM 实时定位软件工程中做了创新改进,通过强化多线程并行计算能力,大大提升建图定位的核心算法性能,完美解决了低特征场景(如纯色墙面、重复结构空间等)的建图定位与重定位问题;
利用强化学习策略,涂鸦成功突破传统规则系统的局限,解决了难以泛化的各类复杂场景脱困问题;
改进并解决了最优覆盖路径规划问题。
最终经过实际应用后的可靠反复测验,搭载涂鸦运动子系统的移动机器人产品,在定位精度、任务完成率、能效比等关键算法性能指标上,较主流友商方案实现 10%~20% 的显著提升!
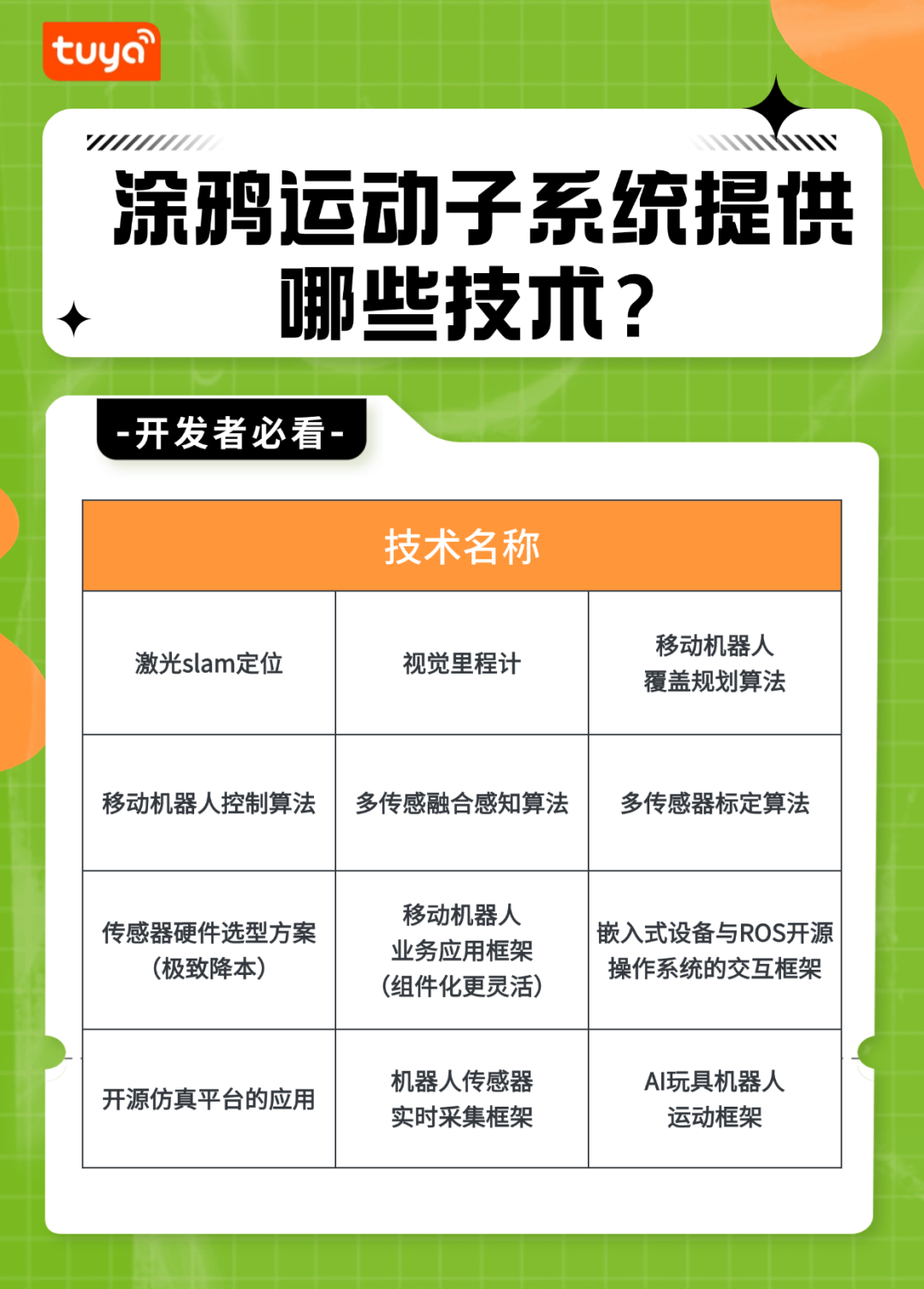
1.现阶段,我们将逐步为开发者提供多种技术支持:
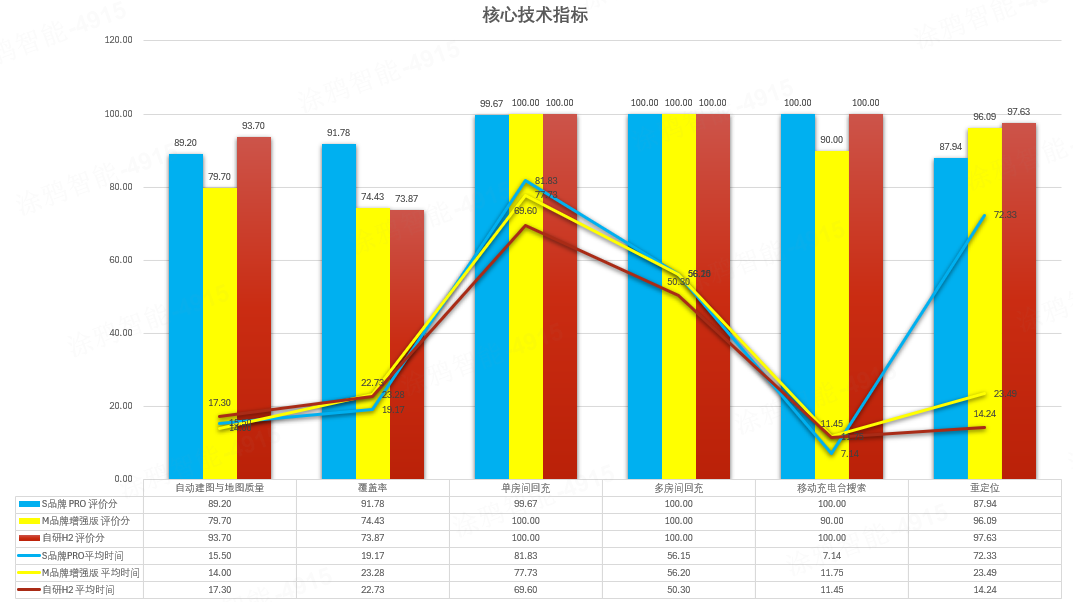
2. 该系统在移动机器人中的能力水平
以扫地机器人的应用为例。目前相较于市面上同等规格的家用清洁机器人产品,涂鸦在部分关键指标上都有领先优势:
2.1 高效的智能规划清扫能力
相较于业界同等水平的清洁机器人,涂鸦提供的家居清扫规划算法,在技术实现与性能优化层面展现了多重差异化优势,包括清扫效率和清洁覆盖率都呈现大幅度领先,而这也是长期打磨和优化后的最优策略。
2.2 鲁棒的定位能力
市面上有不少以激光雷达为定位方案的移动机器人,这种技术方案的弊端就在于移动机器人很容易在非平整地板( 如门槛、吧台椅等场景)出现叠图的现象,导致用户经常抱怨需要重新建图、体验感差。
而涂鸦运动子系统提供的定位方案,经过大量的算法工程优化和传感器处理优化,能在任意工况下,实现完全不叠图,保证稳定的定位输出。

2.3 高效的重定位能力
涂鸦运动子系统精心集成多种环境适配算法,为用户提供了快速重定位的能力。通过该系统,移动机器人可根据实时采集的几何结构、光照强度等参数,动态切换最优定位方案。
比如:用户可以在多个房间、办公楼、医院、商场等任意环境中启动机器人,无需指定机器人初始位置或初始楼层,就能自适应无缝衔接、匹配多楼层地图。即使在低特征的长廊退化环境下(指线性狭长地理空间),定位效率与准确率也能达到 100%。
(涂鸦重定位能力展示)
2.4 快速自主建图
该系统还提供了高效的自主建图能力,摆脱传统的手动建图或者全屋覆盖建图,可帮助提高移动机器人的环境构建与部署效率。
2.5 突破性实现毫米级贴边能力
相对于市面上的机器人,要达到 1 厘米以内的贴边清扫能力,往往需要搭配昂贵的线激光模组。而涂鸦提供的移动能力,可以脱离线激光模组,单纯使用 5HZ 的导航激光,就能利用算法补足激光测量频率与精度问题,实现毫米级贴边清扫能力。

3. 提供二次开发能力
除了基础的规划、定位、控制能力,该系统还提供一系列的二次开发能力,为开发者提供灵活的产品功能模块化开发流程。
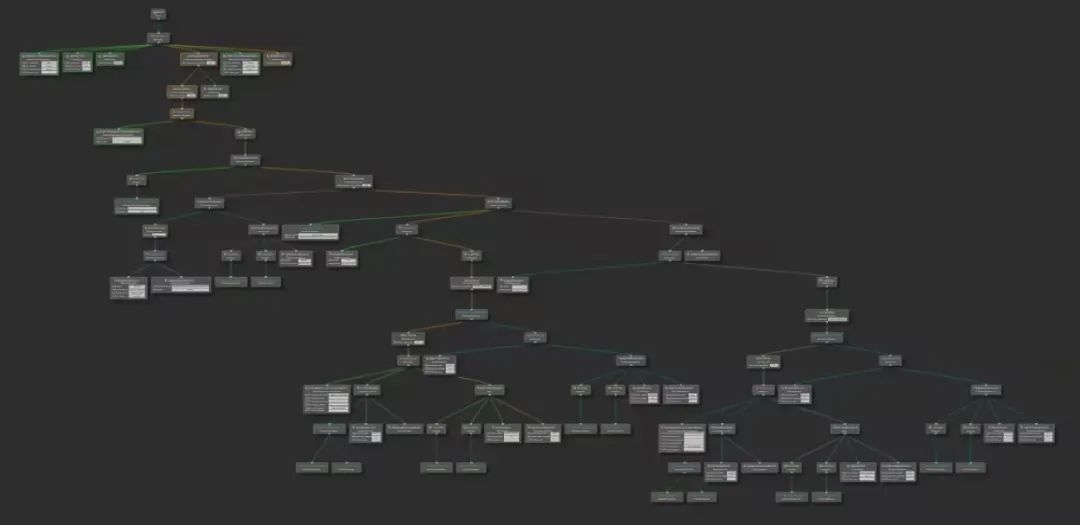
3.1 自定义机器人行为
针对多形态机器人开发者及高阶算法定制需求,涂鸦运动子系统突破传统扫地机开发框架桎梏,为开发者额外提供一系列默认的行为框架:在行为框架中,开发者可任意添加并定制属于自己的控制动作。
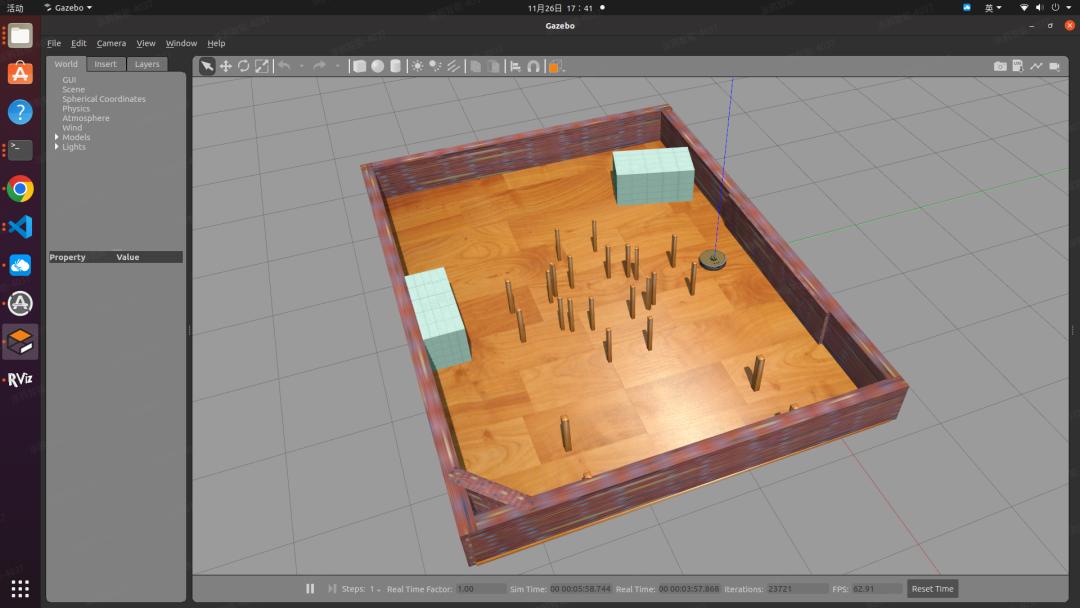
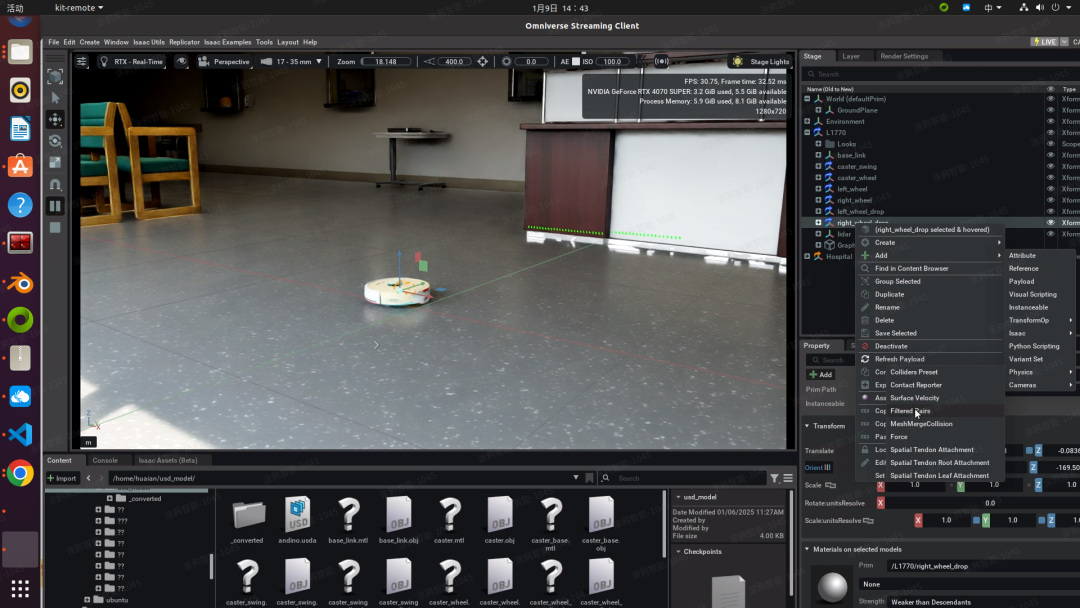
3.2 机器人仿真框架
针对还不想投入硬件开发、只想先验证算法原型的开发者,涂鸦提供基于主流 gazebo、isaac sim 等仿真环境的调试和桥接入口,开发者们可基于此先行调试,最后再部署算法到生产环境中,大大降低试错成本和时间。
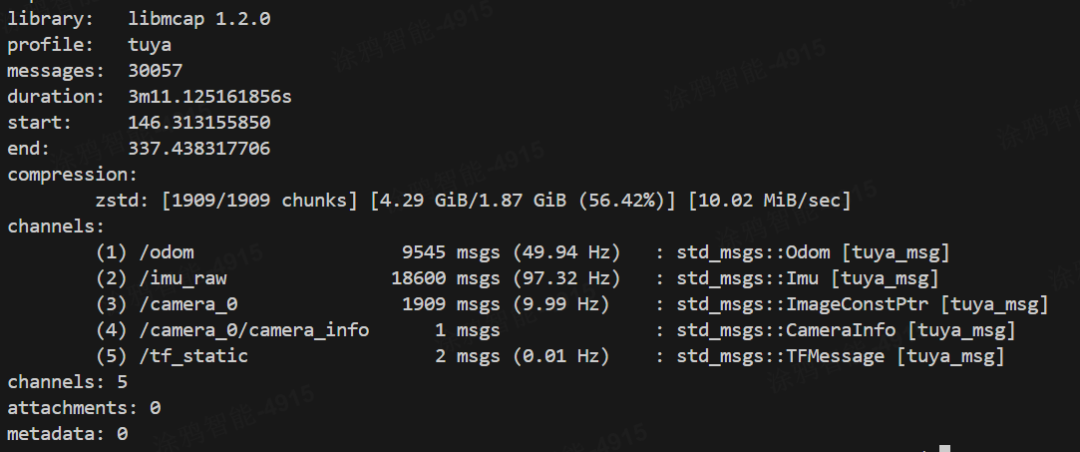
3.3 传感器信息录取与回放应用
为了方便开发者对还处于运行中的移动机器人进行故障分析,涂鸦贴心提供相关信息的实时记录和回放功能,助力开发者完成离线调试。
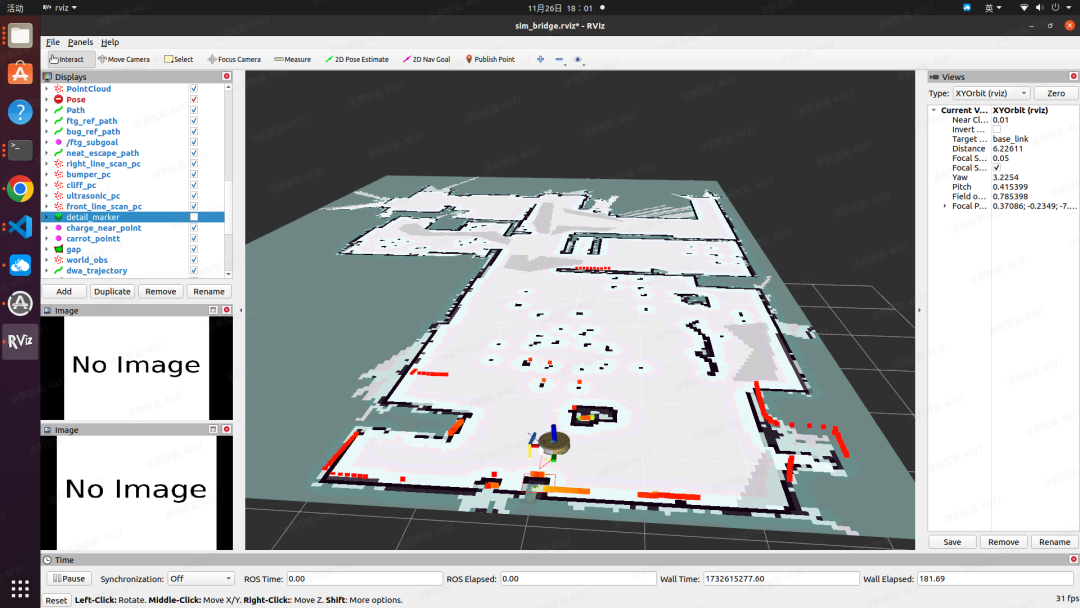
3.4 与 ROS 开源社区的桥接与实时可视化调试
通过涂鸦运动子系统开发平台,开发者也可以使用 ROS1/ROS2 平台的桥接功能,在设备运行时,就能在 ROS 开源软件中进行可视化调试。
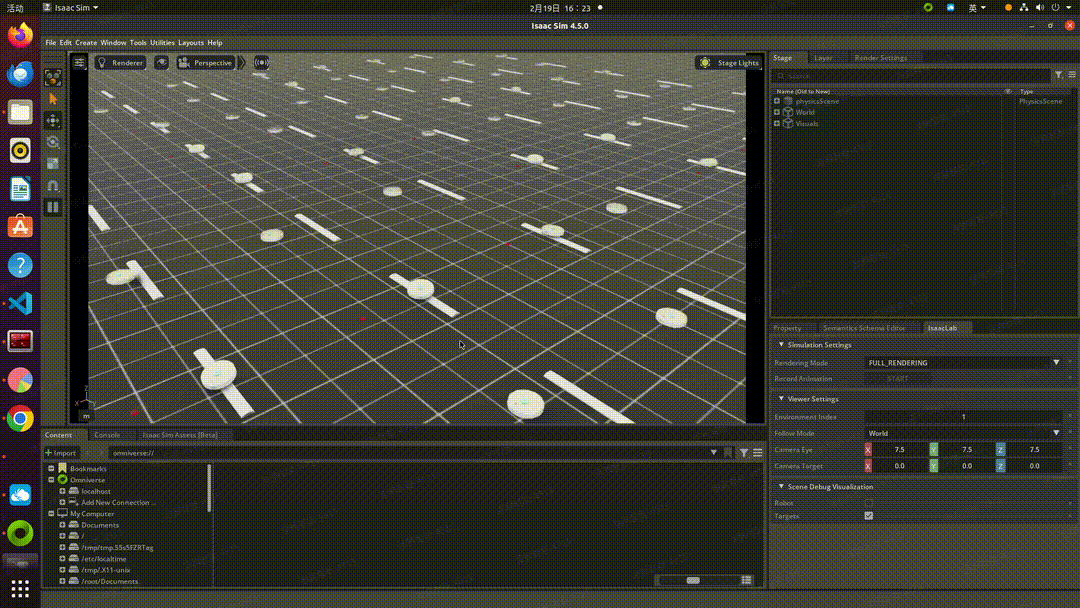
3.5 AI 强化学习部署流程
基于涂鸦 issac lab 的强化学习功能,用户可以自定义学习任务,并结合涂鸦提供的运动子系统行为树框架,快速部署预训练模型。
3.6 更多的算法与功能开源
我们不局限于上述描述的二次开发功能,还可以针对不同的开发者释放更多源码。
-
机器人
+关注
关注
213文章
31391浏览量
223549 -
移动机器人
+关注
关注
2文章
819浏览量
34928 -
涂鸦智能
+关注
关注
7文章
319浏览量
20761
发布评论请先 登录
为移动机器人量身定制的RK3588工控机,保障AGV与AMR稳定运行

电压放大器在四足压电移动机器人运动输出特性实验中的应用

探索 NXP MR - CANHUBK344 评估板:为移动机器人应用赋能
MR-BMS771参考设计:适用于移动机器人的电池管理系统
Infineon移动机器人电机控制方案深度解析
Infineon DEMO_IMR_BMSPWR_V1:移动机器人电池管理系统的卓越之选
Infineon DEMO_IMR_BMSCTRL_V1:助力移动机器人电池管理的创新方案
移动机器人“芯”引擎爆发,禾赛、海思新品逆袭

移动机器人技术的发展历程
恩智浦自主移动机器人设计要点




评论