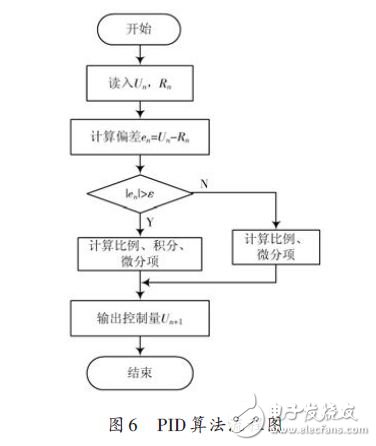
 最简单的单片机PID控制算法程序
最简单的单片机PID控制算法程序
/*************定义全局变量*****************/
uchar Kp,TI,Td
int Set_speed;
/*************PID初始化函数***************/
void PID_init(void){
Serror=0;
FError=0;
Kp=30;
TI=500;
Td=10;
}
int PID_control(int Now_speed)
{
int Error,Serror,result;
Error=Now_speed-Set_speed;
Serror=Serror+Error;
result=(Kp*Error+Kp*0.05/TI*Serror+Kp*Td/0.05*(Error-FError));
FError=Error;
//对占空比进行限幅处理
if(result《10)
{result=0;} else
if(result》1000)
{result=1000;}
return result;
}
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
单片机
+关注
关注
6044文章
44632浏览量
639394 -
PID
+关注
关注
36文章
1473浏览量
85941
原文标题:最简单的单片机PID控制算法程序
文章出处:【微信号:changxuemcu,微信公众号:畅学单片机】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
单片机的PID控制算法
我国提出了中国制造2025。目前企业工业自动化的水平已经成为现代化水平的一个主要衡量指标。PID控制器的特点是结构简单、应用广泛、完全摆脱了精确模型的限制,这样就能解决在工业过程中需要精确建模的困难。那么,基于
发表于 01-27 11:04
•3次下载
基于单片机的水温控制系统设计的合集包括程序PID控制算法和参数整定
本系统设计采用基于PID算法的单片机控制来实现水温的调控。单片机控制部分采用AT89C51
发表于 06-08 08:00
•140次下载
使用单片机和Arduino实现增量式PID位置式PID算法和PID库免费下载
本文档的主要内容详细介绍的是使用单片机和Arduino实现增量式PID位置式PID算法和PID库免费下载。
发表于 05-28 16:30
•69次下载





 工商网监
工商网监
评论