 关节电机驱动,解锁智能机器人 的“灵动” 密码
关节电机驱动,解锁智能机器人 的“灵动” 密码
在智能机器人与高端设备的世界里,关节电机驱动是赋予它们灵动身姿的关键。它集成电机、减速器、传感器和驱动电路,精准控制运动。本文将深入剖析其核心技术,揭秘两款高性能驱动模块,一同探寻智能运动的奥秘。
 前言
前言
什么是关节电机?简单来说,它就好像人体的关节一样,可以精确控制机器人的运动姿态,是机器人的核心动力部件。它将电机、减速器、传感器和驱动电路集成在一起,能够实现高精度的旋转或直线运动,是四足机器狗、人形机器人、协作机械臂等设备的动力核心部件。
 关节电机:运动设备的“心脏”
关节电机:运动设备的“心脏”
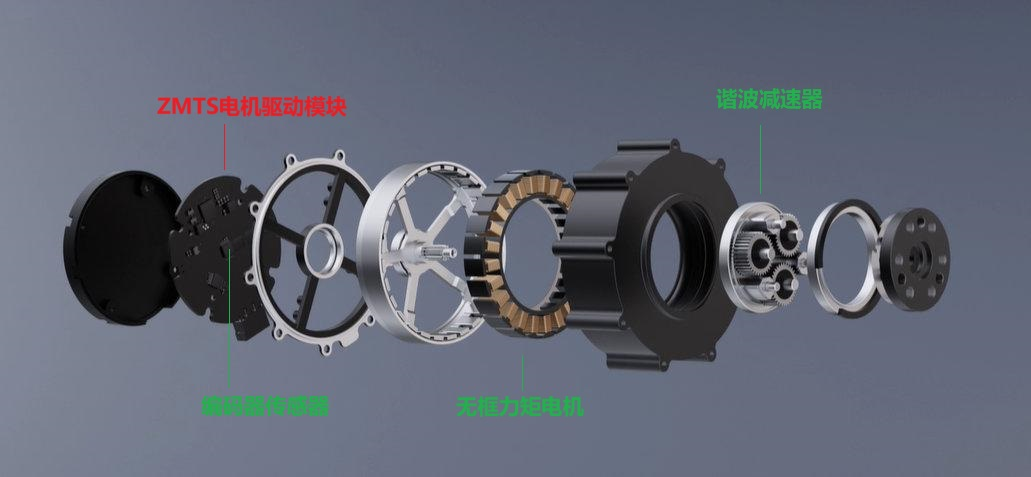
关节电机主要由以下四大核心组件构成,既保证了高扭矩密度,又实现了紧凑的空间布局:
1. 无框力矩电机
一般为外转子式无刷直流电机,电机的转子直接嵌入设备关节轴,定子与负载刚性连接,这样就可以省去了传统外壳,大幅减小体积。其扭矩密度高达35N·m/kg,非常适合仿生机器人、协作机械臂等对空间敏感场景。电机常用电压为24V~48V,功率范围为50W~1000W。
2. 谐波减速器
采用柔轮与波发生器的弹性啮合结构,减速比为30:1~160:1,传动效率超过85%,实现零背隙动力输出,重复定位精度可达1弧分以内。
3. 高精度编码器
集成17位(或更高精度)的绝对值编码器,可实时反馈位置和转速信息,为闭环控制提供精准数据。由于电机通过谐波减速器驱动负载时,电机和负载之间可能存在非线性位置误差,因此部分高精度关节电机会在电机和负载端各安装一个编码器。
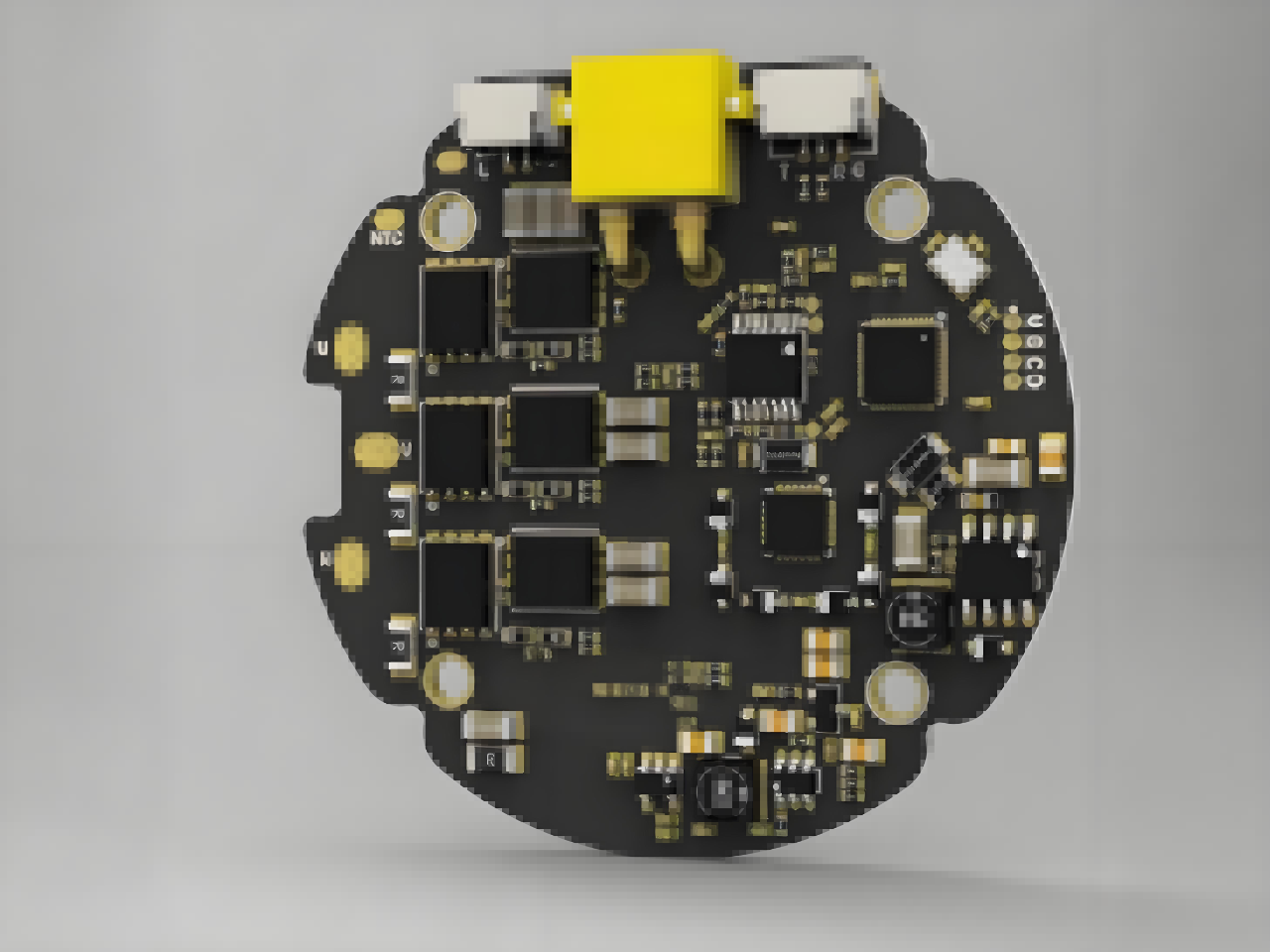
4. 电机驱动模块
关节电机一般通过EtherCAT、CAN或RS485与主站通信。对于协作机器人等对实时性要求高的应用,通常采用EtherCAT总线并执行CIA402运动控制协议;而对于机器狗和人形机器人等对响应速度要求高的场景,则常采用MIT或厂家自定义的简易通讯协议。
驱动模块,精准定位
ZLG致远电子推出了两款关节电机驱动模块,专为高端运动控制设计,兼容性强、稳定性高,适用于工业和消费级场景,可轻松嵌入关节电机。
1.ZMTS-EB1200-JM(EtherCAT版)
适合高实时性、高位置精度的应用,如协作机器人。
宽压动力:24V~48V输入,7A输出,直径58mm,适配非穿孔电机。
双编码器:内置21位绝对值编码器,可扩展SSI或正交编码器。
实时通信:工业级EtherCAT总线,同步时间≤256μs。
协议兼容:支持CIA402标准协议(CSP/CSV/CST/PP/PV/HM模式)。
运动黑科技:双环ADRC位置控制,结合“前馈+反馈”纠偏,显著提升抗干扰能力和定位精度。
2.ZMTS-CB1200-JM(CAN版)适合响应速度快、位置精度要求不高的应用,如机器狗、人形机器人、摄影云台等。
- 宽压动力:12V~48V输入,7A输出,直径58mm,适配非穿孔电机。
- 单编码器:内置21位绝对值编码器。
- 可靠通信:基于CAN总线,同步时间≤2ms,适应复杂电磁环境。
- 协议兼容:无缝适配MIT机器狗协议,支持运控/位置/速度/扭矩模式。
- 温控黑科技:通过电流和电阻实时估算电机温度,响应快、精度高,有效防止电机过热。
- 两款驱动模块各具特色,满足不同场景需求,助力机器人运动控制更高效、更智能。
应用场景,解锁智能未来
1. 工业协作臂 — 转矩模式下的安全交互
ZMTS-EB1200-JM(EtherCAT版),在CIA402的转矩模式(CST)下,驱动模块实时感知外部阻力,遇碰撞时自动降低输出力矩,保护人员与设备安全,适用于精密装配、医疗辅助等场景。
2. 四足机器狗 — 速度模式下的动态适应
ZMTS-CB1200-JM(CAN版)在废墟救援等复杂环境中表现出色。在运控模式下,机器狗能够快速调整步频,轻松跨越碎石、斜坡等地形。相比传统的三环位置控制,其稳定性大幅提升,让机器狗在复杂环境中行动自如。
3. 超稳云台 — 平顺且灵活
ZMTS-CB1200-JM(CAN版)在摄影稳拍器中也有出色表现。在运控模式下,它可以灵活配置响应速度和位置精度的关系,确保画面始终保持稳定输出。无论是在连续拍摄还是复杂运动场景中,都能让画面平滑流畅,满足专业影视创作的需求。
技术赋能,驱动无限想象
从工业生产线到家庭服务,从极限救援到影视创作,关节电机驱动板正在不断突破“智能运动”的边界。我们以算法创新为核心,以可靠性为基石,为开发者提供“开箱即用”的解决方案。无论是科研机构、机器人厂商,还是创客团队,都能在这里找到最适合自己的动力驱动方案。
-
电机驱动
+关注
关注
60文章
1247浏览量
87137 -
智能机器人
+关注
关注
17文章
880浏览量
83451 -
机器人关节
+关注
关注
0文章
9浏览量
141
发布评论请先 登录
相关推荐
人形机器人设计中,哪些关键部位需要功率器件?典型电压/电流参数如何设计?
中科本原推出面向人形机器人的关节电机解决方案
人形机器人深度解析
富临精工拟投1.1亿建机器人智能电关节模组研发基地
伺服电动缸在人形机器人中的应用
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
【「具身智能机器人系统」阅读体验】1.初步理解具身智能
机器人关节的灵动之源:揭秘舵机的技术奥秘
【「具身智能机器人系统」阅读体验】+初品的体验
“0元购”智元灵犀X1机器人,软硬件全套图纸和代码全公开!资料免费下载!
机器人关节模组为何选择双编码器设计?

专为人形机器人应用打造,助力具身智能行业发展,泰科机器人关节模组持续升级!

泰科机器人携新款行星滚柱丝杠线性关节模组和双臂协作机器人亮相2024年ITES深圳工业展






 工商网监
工商网监
评论