 PID属于无模型控制,调节三个环节的参数会产生什么影响?
PID属于无模型控制,调节三个环节的参数会产生什么影响?
由于PID属于无模型控制,调节三个环节的参数会产生什么影响根据控制对象的不同也会有很大差别。你提到的这些结论其实都是根据经验总结出来的。既然你说是从来没有接触过PID,那我就举例尽量说明一下PID控制是怎么一回事。
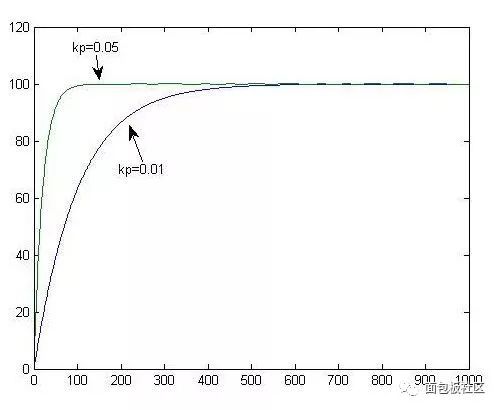
1)假设我们面对的系统是一个简单的水箱的液位,要从空箱开始注水直到达到某个高度,而你能控制的变量是注水笼头的开关大小。那么这个简单的数学模型就是

对于这个简单的系统,我们甚至只需要一个比例环节

就能将其控制住。说白了,也就是水箱液位离预定高度远的时候就开大点,离的近的时候就开小点,随着液位逐步接近预定高度逐渐关掉水龙头。

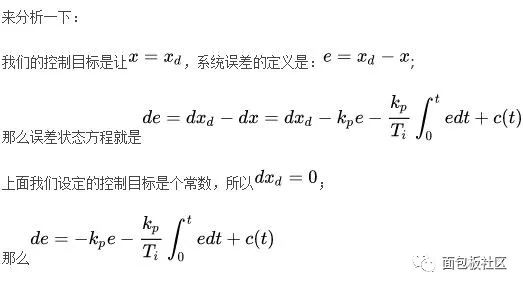
2)假设咱们这个水箱不仅仅是装水的容器了,还需要持续稳定的给用户供水。
然后有人就想到,第二小节里头那个水箱跟第一小节的相比,不就是多了一个漏水的窟窿么。它漏多少我给它补多少,那不就成了第一小节里的简单系统了么。靠谁补呢?积分环节这时候就派上用场了。我们把之前的控制器变成比例环节+积分环节:
积分环节的意义就相当于你增加了一个水龙头,这个水龙头的开关规则是水位比预定高度低就一直往大了拧,比预定高度高就往小了拧。如果漏水速度不变,那么总有一天这个水龙头出水的速度恰好跟漏水的速度相等了,系统就和第一小节的那个一样了。那时,静差就没有了。这就是所谓的积分环节可以消除系统静差。4)啥叫积分时间常数呢?
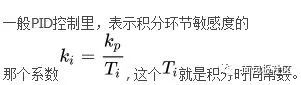
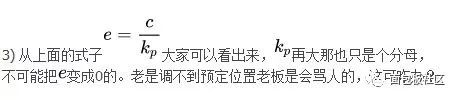
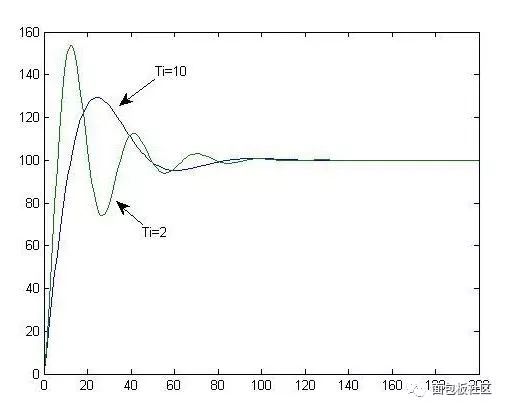
从这个式子我们可以看出,积分时间常数越大,积分环节系数就越小,积分环节就越不敏感(也就是第二个水龙头越细)。当咱们只有一个比例环节的水龙头注水的时候,是不会注水注多的,因为离得越近水龙头关的越小啊。但是当咱们用俩水龙头注水的时候,在没到预定高度前第二个积分环节的水龙头可以一直在往大了拧的,那当到达预定高度的时候它恰好拧到最大,自然而然就会注水注多了。而多出去的这部分水就叫做“超调”。第二个水龙头越粗,多注的水就会越多,它调到恰好等于漏水速度的时间就会越快,但同时会多更多波折。于是,老师告诉我们增大积分时间I有利于减小超调,减小振荡,使系统的稳定性增加,但是系统静差消除时间变长。如下图:
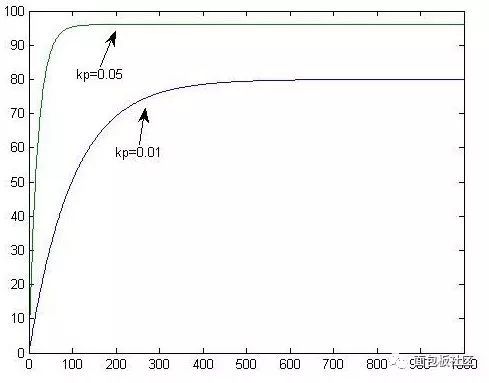
5)接下来我们来看点有意思的东西。还是上面这个系统,假如我们选用相同的积分时间常数,但是选择不同的比例系数会如何呢?
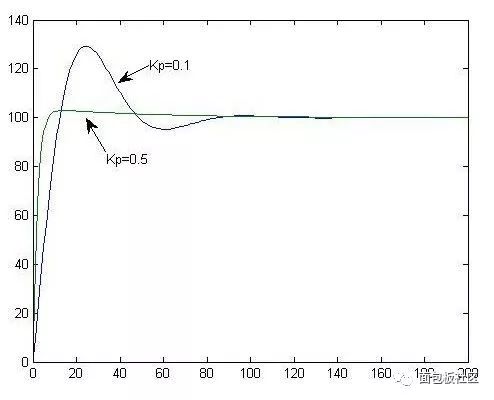
看到上面这幅图,一些记性好的童鞋可能就有疑问了。因为老师明明说过”过大的比例系数会使系统有比较大的超调,并产生振荡,使稳定性变坏“,但是上面这幅图里怎么比例大的反而超调小呢?其实上面这幅图很好解释,小节4里我们说明了PI控制器超调出现原因是积分这个水龙头在到达目标液位时也恰好开到了最大。而比例这个水龙头越粗,那么它在超出目标液位时对超调的抑制也就越明显。这里,我想再强调的是:PID参数整定的结论是根据普遍经验总结的,但是针对某个具体的系统不一定完全适用。6) 在上面的系统中,我们假设用户用水的固定的一个值,但是实际情况中用户的用水量往往是变化的。假如我们的系统呢?

“微分环节主要作用是在响应过程中抑制偏差向任何方向的变化”“微分常数不能过大,否则会使响应过程提前制动,延长调节时间”而至于“微分环节会降低系统的抗干扰性能”, 微分环节相对于PI环节更容易收到这些细微噪声的影响。
微分环节相对于PI环节更容易收到这些细微噪声的影响。 从这里,我们可以看到PID控制的局限。—————————————————微分环节想了很久,最后还是觉得想到的例子都不够清楚准确,还是用式子更顺手一些。
从这里,我们可以看到PID控制的局限。—————————————————微分环节想了很久,最后还是觉得想到的例子都不够清楚准确,还是用式子更顺手一些。
-
PID
+关注
关注
35文章
1472浏览量
85480 -
PID参数
+关注
关注
0文章
19浏览量
8686
原文标题:通俗讲讲 PID 参数整定
文章出处:【微信号:gh_bee81f890fc1,微信公众号:面包板社区】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论