 机器人实时TCP速度输出与写屏方法步骤
机器人实时TCP速度输出与写屏方法步骤
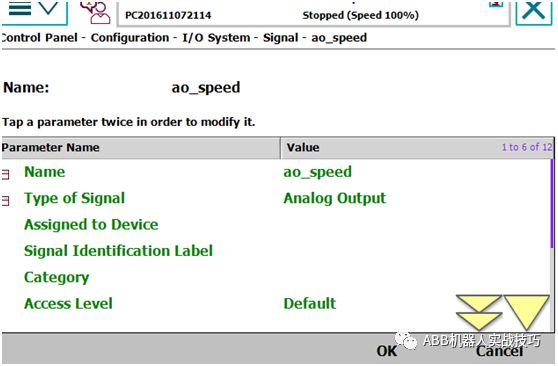
2)控制面板,配置,signal里新建模拟输出如下(举例为虚拟AO,也可以建立诸如DSQC651真实模拟输出)
3)
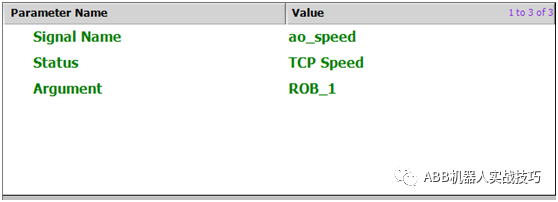
4)关联次信号到系统输出
5)在控制面板,配置的system ouput里新建,信号名为刚建立的模拟输出,status选择TCP Speed
6)
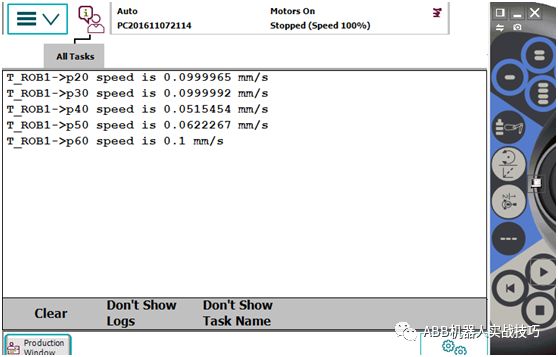
7)此时测试,可以通过模拟量ao_speed获得机器人的实时tcp速度。在一些和机器人速度有关的工艺上可以使用该信号。
8)想在机器人运行到某些位置时,也实时写屏速度,如何实现
9)可以通过MoveLSync语句来实现
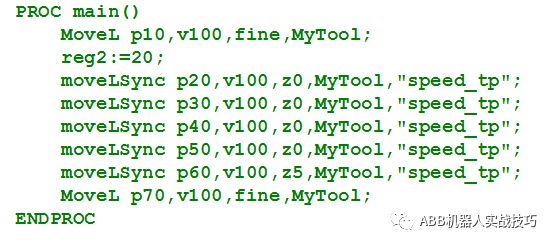
10)MoveLSync和MoveL语句相同,语句末加入机器人到达位置时调用的程序,该程序内不能有运动指令。如果使用zonedata,则机器人到达最接近设置位置时调用程序,类似triggerIO的提前距离为0.
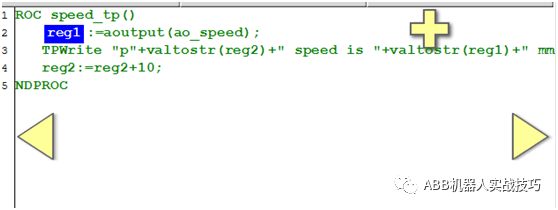
11)Speed_tp程序如下。即先获得实时速度,然后写屏。
12)
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
210文章
28189浏览量
206454 -
TCP
+关注
关注
8文章
1348浏览量
78981
原文标题:机器人实时TCP速度输出与写屏
文章出处:【微信号:GKYXT1508,微信公众号:工控云学堂】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
水下机器人便携式遥控单元设计
电气有限公司的EView MT4200型触摸屏为例,分别介绍水下机器人水面遥控单元的硬件组成结构,单片机与触摸屏之间的通信方法以及遥控单元软件框架。
发表于 03-08 14:21
创意机器人的教程
://www.wifi-robots.com/thread-1258-1-1.html 【机器人创意工作室教程五】高级应用:驱动板程序的烧写http://www.wifi-robots.com
发表于 10-11 17:41
工业机器人的基本结构
工具(如焊枪、喷嘴、机加工刀具、夹爪)与主构架的连接机构,它具有3个自由度。 驱动系统为机器人各运动部件提供力、力矩、速度、加速度。 测量系统用于机器人运动部件的位移、
发表于 01-19 10:36
机器人视觉——机器人的“眼睛”
为主,尽管机器人开始有搭载摄像头的趋势,但对视觉的理解仍然较低,往往需要有明显的特征点作为辅助,同时抗干扰能力弱,对光照条件,部分遮挡等常见题目不能找到可靠的方法。 机器人技术对图像理解的要求是迫切
发表于 01-23 15:02
美国机器人送快递啦
两个购物袋的货物,运送时间范围为5到30分钟,因此此类机器人仅服务于小范围快递的运送。这样可使用户得到更精准的运送服务,使用手机呼叫运送服务后,20分钟内货物就能送至家门口。此外,在运送速度提高的同时
发表于 12-31 11:32
如何保障桁架机器人的安全
工作结束后用以停放机器人;4.低压报警装置:当气源工作异常时,实时侦测并及时给予安全警示信号,提醒操作者迅速采取措施;5.误操作保护装置:监控机械臂运动速度,防止误操作时机械臂快速上升或下降时引起意
发表于 09-29 12:08
焊缝跟踪:自动化机器人实时焊缝跟踪寻位
焊缝跟踪:自动化机器人实时焊缝跟踪寻位自动化机器人焊接过程中会出现工件夹偏、钣金件热变形、机器人焊接后再进行人工补焊等情况频繁发生,非但没有节省人工成本而且增长了产品返修率。自动化
发表于 04-19 10:48
安川机器人伺服电机维修,常见机器人伺故障服电机和维修方法
安川机器人伺服电机维修,常见机器人伺服电机故障和维修方法1、安川机器人伺服电机在很低的速度运行时,时快时慢,象爬行 一样,怎么办? 伺服电机
发表于 06-30 17:54
如何实现移动机器人的设计?
移动机器人利用导航技术,获得机器人的目前所处的位置,结合传感器技术对周围外界环境(障碍物等)作实时探测,并根据环境提供的信息规划一条可行路径完成达到目标点的任务。移动机器人技术涉及到
发表于 11-23 15:08
Profinet转Modbus TCP网关连接搬运机器人配置案例
本案例是西门子1200PLC通过Profinet转Modbus TCP网关连接搬运机器人配置案例,所需设备为西门子1200PLC,耐用通信技术Profinet转ModbusTCP网关,搬运机器人
发表于 06-07 11:16
深刻理解机器人TCP
2017-06-21 16:00 发布于 技术干货转自:指南车机器人学院工业机器人使用的途径就是要装上工具(TOOL)来操作对象,那么如何描述工具在空间的位姿呢,显然,方法就是在工具上绑定(定义)一
发表于 09-29 16:48
•3次下载
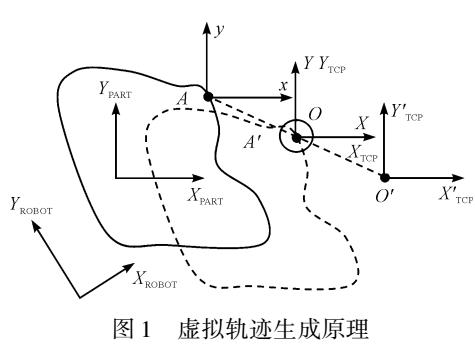
机器人虚拟TCP的设置及其在加工中的应用
针对机器人末端抓持工件时,无法利用生成在工件上的轮廓点进行去毛边加工的问题,对机器人末端抓持工件在工具固定的情况下去毛边加工的方法进行研究,提出在确定工件加工轮廓与机器人末端
发表于 03-08 09:27
•0次下载





 工商网监
工商网监
评论