 如何看待电动汽车电子架构的发展?
如何看待电动汽车电子架构的发展?
接前文如何看待电动汽车电子架构的发展?
1)服务为导向的软件架构
为了面对个性化的需求,功能软件开发需要更敏捷,而基于此ServiceorientedArchitecture(SOA)是完成这项任务的关键,它能够建立动态的实时网络通信关系,把车内各个IP节点根据功能要求进行应用层服务的数据建立交互。

图 SOA架构与服务分布
在AUTOSAR中基于TCP/UDP之上定义了SOME/IP通信模块能够支持SOA架构通信的需要,当然在AUTOSAR标准中SOME/IP也是逐步部署的。
可参考http://some-ip.com对SOME/IP的roadmap的介绍
AUTOSAR4.0–basicsupportforSOME/IPmessagesalreadyexisting.
AUTOSAR4.1–supportforSOME/IP-SDandPublish/Subscribewasadded.
AUTOSAR4.2–thetransformerwasaddedforserializationaswellasotheroptimizations.
AUTOSAR4.3–fixingsometransformerbugs,addingsupportforlargeUDPmessageswithSOME/IP-TPaswellasSOME/IP-SDoptimizations.
在自动驾驶领域内,尤其是在高阶自动驾驶场景中,数据交互量要求巨大,未来基于SOME/IP构建大数据传输还有待验证,至少从AudizFAS上看到并未采用SOME/IP作为其中间件,在确定性网络内需要动态组网应用场景还比较少,但是考虑未来功能升级需求,还是需要研究实现大规模数据传输的组网协议。
2)网络通信 车内网络指的是IVN(InVehicleNetwork)
V2X/V2V需要与国家,地区通信基础设施规划同步,且DSRC非国内主流,暂时没有太多关注
国内的5G部署速度会很快,所以考虑V2X的场景还是结合中国自身情况
对于MEB这样的真正的网络开发需要包含更多的实际设计要求:
100BaseT1与1000BaseT1的标准化使得以太网已作为主干网络的首选,而且整车需要增加冗余设计;
基于AVB/TSN以太网通信规范将成为网络核心底层协议;
确定性网络数据调度设计,保证控制系统时延要求;
CAN到现在还是车辆内部主要网络通信技术的主要原因就是能够满足控制功能的时间延迟,信号优先级抢占等要求;在现有整车电子架构框架下的网络信号路由需求也可以由通信核心的网关实现,当然在一些中高档车上已经有MOST/FlexRay子网,Ethernet主要应用于DoIP与AVB。
备注:FlexRay这个东西能坚持多久,渗透多大范围不乐观。
不久的将来TSN能够把传统以太网改造成与CAN类似的具有优先级抢占功能网络总线技术,同时基于控制功能信号流需求,实现硬件级的网络调度设计。硬件层面参考如下图所示,软件层面AUTOSAR也在逐步发布,但是核心的信号基于时间触发的调度设计需要由软件协议栈确保WorstCase场景下的时延满足功能(应用)软件需求,在现有以太网案例中都有TTTech的身影,后续从OEM核心利益出发这块的设计包括软件开发应该会由自己来掌握。
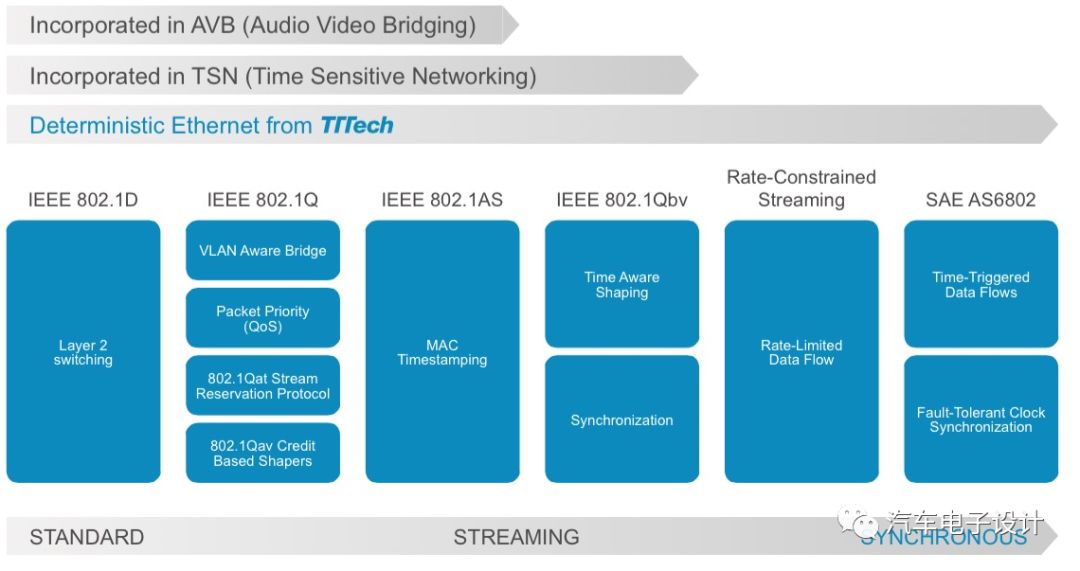
更多TSN标准的信息可以访问以下网站:https://1.ieee802.org/tsn/
以下这张是NXP以太网网关芯片选项表,可以看到大的车企对芯片供应商的要求有哪些。当然业界还有一家在车载以太网加速布局,可以看到TSN基本协议在MAC/PHY中已经部分实现。
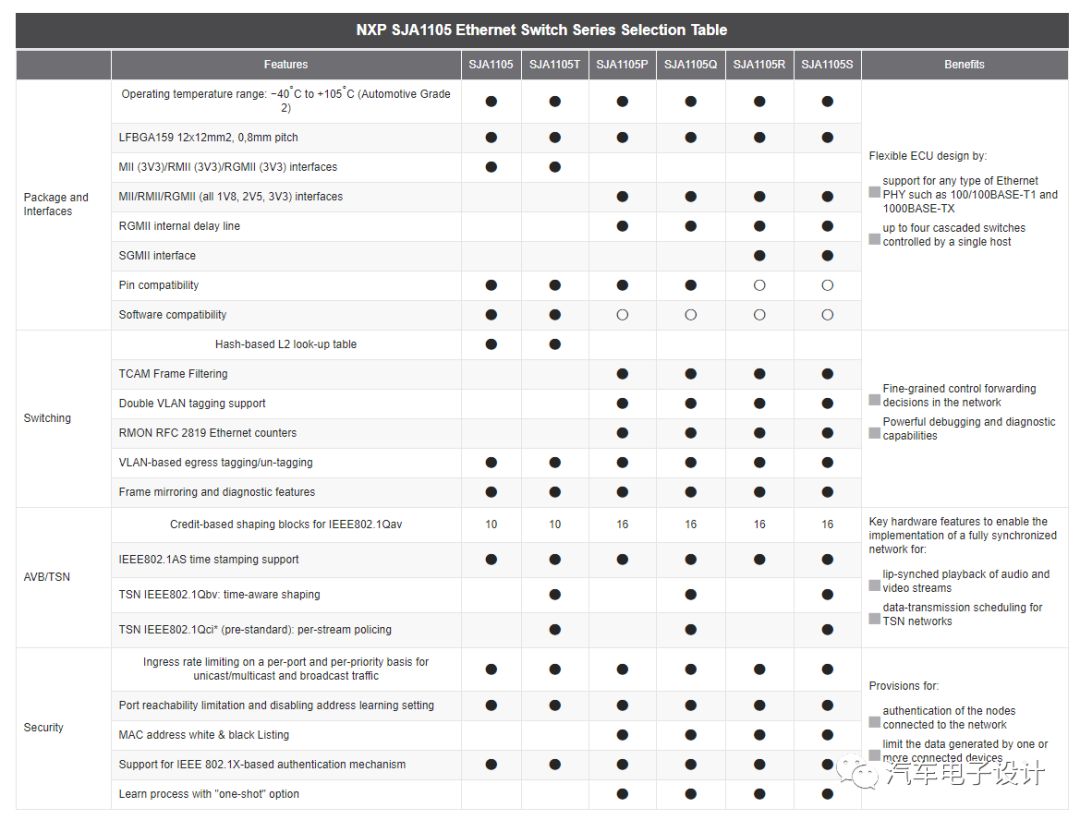
图 NXP以太网芯片摘自www.nxp.com
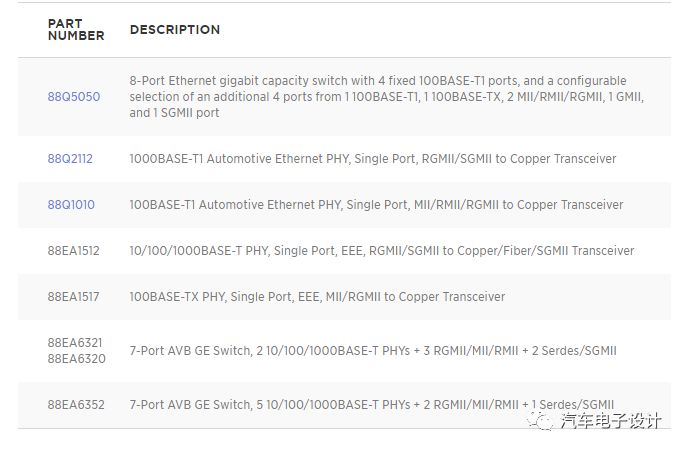
图 Maverll以太网芯片摘自www.marvell.com
在某些材料上,未来在某些应用中规划10G带宽传输。按照现在的车载以太网标准时间表,很难在2020年实现车规级的规范发布,而且底层的线束需要从UTP/STP切换成光纤,另外随着带宽提高对于主芯片的缓存/内存读写能力要求将大大提高,看到IntelGo平台已经把PCIe总线也加入进来,汽车电子发展真的是太快了!!!
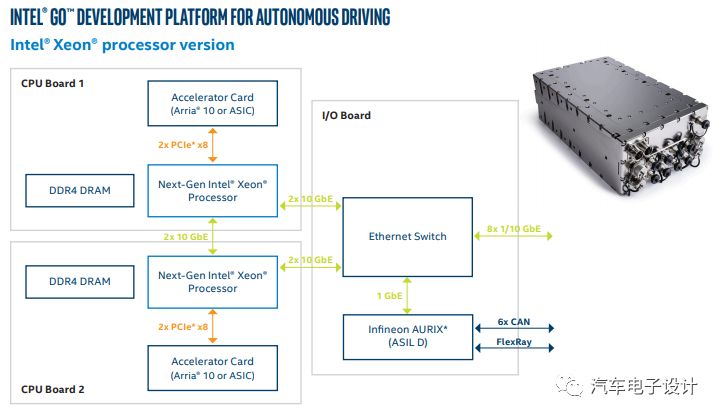
图 Intel自动驾驶平台系统结构图(包含主要总线技术)
3)功能分配
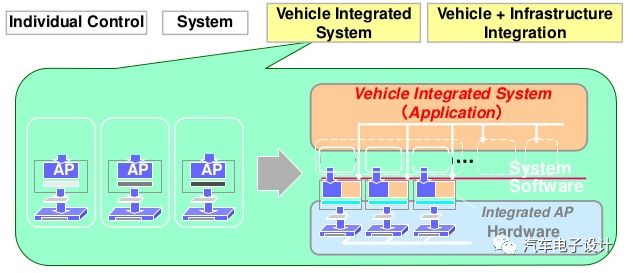
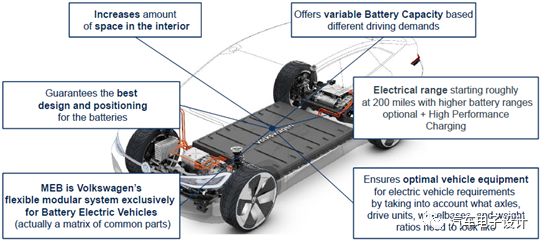
域控制器因为有强大的硬件计算能力与丰富的软件接口支持,使得更多核心功能模块集中于域控制器内,系统功能集成度大大提高,这样对于功能的感知与执行的硬件要求降低,加之数据交互的接口标准化/网络化,会让这些零部件变成标准零件,从而降低这部分零部件开发/制造成本。简而言之,外围零件只关注本身基本功能,而中央(域)控制器关注系统级功能实现。
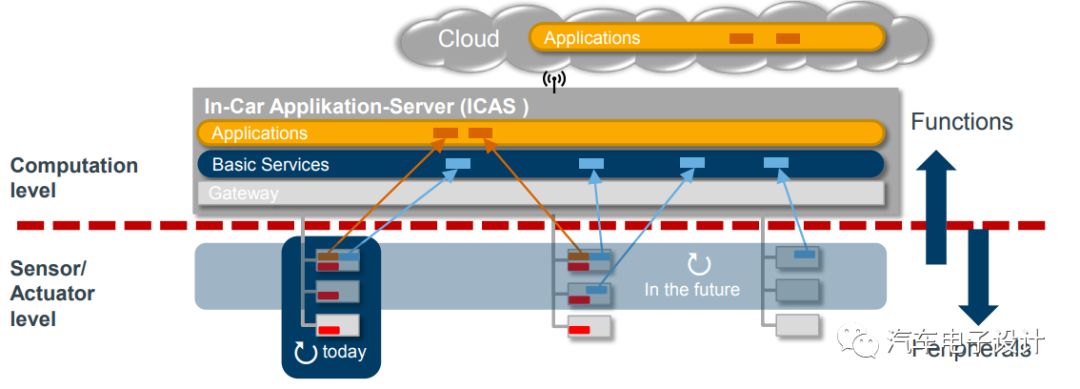
图 大众MEBICAS软件功能规划策略摘自VectorCongress2016
由于大众一向是分布式系统模块化的倡导者,以后哪些ECU合并,算法合并还有哪些功能简化降级,在接下来的信息发布过程中非常值得关注
4)开发模式
上层应用程序可能来自不同的供应商,那么软件开发流程以及后期的集成测试验证也会带来更大的挑战,传统的供应商与OEM的合作模式已经发生变化,Tier1不再是大包大揽,OEM以及第三方软件供应商会更多参与进来,如果硬件开发由另外的合作方负责,那么后续的软件/系统集成将是一个非常复杂的工作。作为最终的负责方,OEM在系统开发中会担当越来越重要的角色,未来的成功将来自于全产业链的核心技术整合
软件的开发计划与硬件的开发计划相互独立,软件将会是全生命周期内迭代持续,且软件可能横跨更多不同硬件设备。而以往的开发都是以零件SOP节点作为软件开发计划的参考时间,同时硬件方案是同步确定的。
未来隐藏在这个电动平台下面的软件整合工作,值得期待。
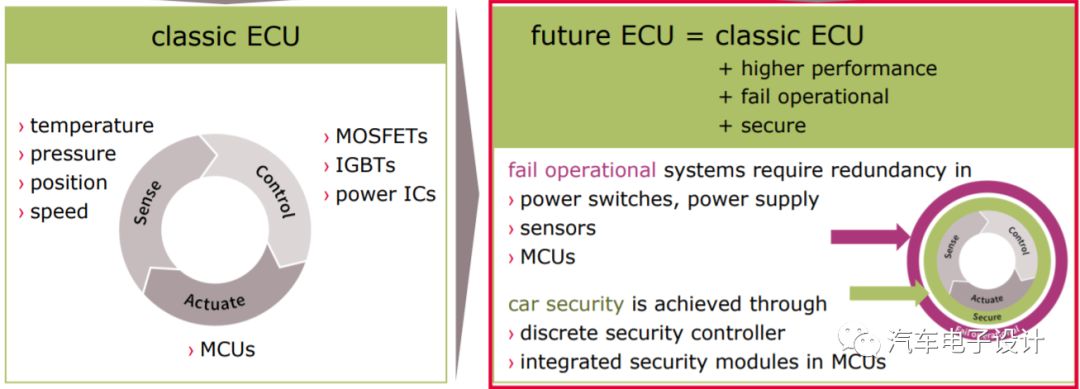
5)控制器硬件
传统主控制器主要还是基于32位Tricore,PowerPC以及850等架构的微处理器,而对于海量计算,高速数据传输,传统架构体系已经无法满足上述应用需求,这也是为什么新架构内核芯片在积极进入汽车电子行业,
可以看看这两家最新的车载芯片都从已有的芯片平台往ARM上转移
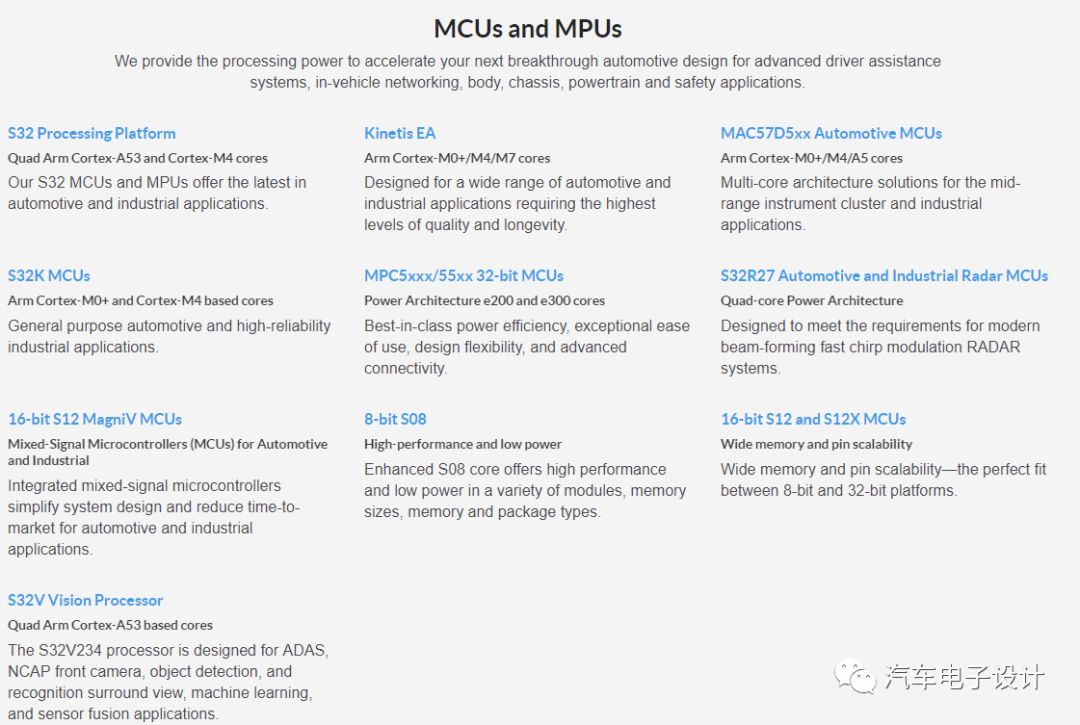
https://www.nxp.com/products/automotive-products:MC_50802?tid=sbmenu#MCUMPU
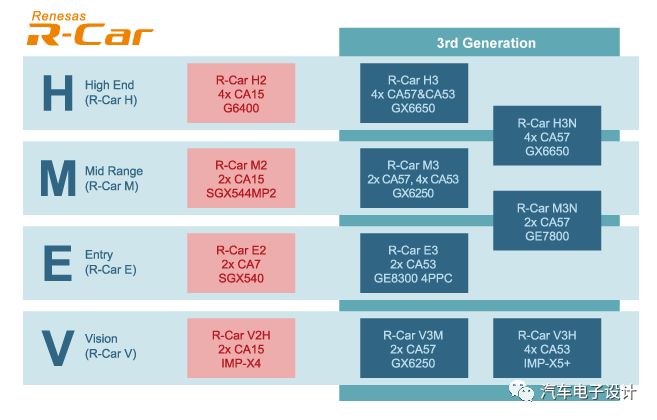
https://www2.renesas.cn/zh-cn/products/automotive-lsis/r-car.html
对于MachineLearning,DeepLearning等技术在自动驾驶的场景的应用, 需要提供额外的软硬件支持.这也是为什么AI芯片,GPU等非汽车行业的计算硬件在汽车行业内受到重视.未来对于域控制器内部的硬件必定要根据功能安全等级划分为Performance,Safety等不同类型的功能,根据不同类型的功能分配进入不同功能安全支持的芯片内.从现有控制器硬件架构看多颗/多核芯片以及冗余架构是域控制器设计主流设计, 虽然MEB还没有提供官方硬件控制器信息,但是借鉴AudizFAS自动驾驶控制器ZFAS,未来域控制器只会在此基础上增加更多高性能,可靠性的设计。
结束语
数字生活在国内已经由"互联网+","共享经济"的风口下比欧美发到国家领先了许多,但是汽车行业也正乘着这股热潮借由各种题材来展现美好的前景。围绕个人的数字化应用入口已经由几家互联网巨头所把控,新的公司想成为其中一极越发困难。而在个人数字生活中由一件硬件与两个账号是至关重要的,手机+微信/支付宝。国内大部分人的数字生活有这3样东西构建,剩下的服务或者工具都可以在3样东西下授权与操控。所以不知道MEB来到国内如何定位自己的数字生活中的角色。
对于手机行业,下面是2007年与2017年全球销量前5排行榜,在智能化以及中国品牌崛起的10年间原来4位领跑者已经退出了。那么汽车行业的洗牌是否也在这股电动化,智能化风潮中已经到来?
| 2007年全球销量 | 2017年全球销量 |
| 诺基亚 | 三星 |
| 摩托罗拉 | 苹果 |
| 三星 | 华为 |
| 索爱 | OPPO |
| LG | 小米 |
-
汽车电子
+关注
关注
3027文章
7985浏览量
167353 -
网络通信
+关注
关注
4文章
809浏览量
29851 -
自动驾驶
+关注
关注
784文章
13877浏览量
166638
原文标题:MEB新一代的汽车电子架构展望
文章出处:【微信号:QCDZSJ,微信公众号:汽车电子设计】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论