 嵌入式Linux下的Socket CAN驱动理解
嵌入式Linux下的Socket CAN驱动理解
由于Socket CAN涉及到CAN总线协议、套接字、Linux网络设备驱动等。因此,为了能够全面地了解Socket CAN的原理。我们需要了解以下几个方面的知识点:
(1)CAN总线协议;
(2)Socket原理;
(3)Linux网络设备驱动;
当熟悉以下三个方面的知识点后,我们再去分析基于Linux的Socket CAN的驱动。这样的话理解起来更加容易、易懂。
(4)Socket CAN的驱动;
一、CAN总线协议
由于CAN总线协议的内容太多,作为博文来说,不适宜很详细的讲解。需要深入了解的朋友们可以Google一下。以下只是作些简要的说明。
CAN是ControllerArea Network(控制器局域网)的缩写。CAN通信协议在1986年由德国电气商博世公司所开发,主要面向汽车的通信系统。现已是ISO国际标准化的串行通信协议。根据不同的距离、不同的网络,可配置不同的速度,最高速度为1MBit/s。
CAN被细分为三个层次:
(1)CAN对象层(the object layer);
(2)CAN传输层(the transfer layer);
(3)CAN物理层(the phyical layer);
对象层和传输层包括所有由ISO/OSI模型定义的数据链路层的服务和功能。
对象层的作用范围包括:
(1)查找被发送的报文。
(2)确定由实际要使用的传输层接收哪一个报文。
(3)为应用层相关硬件提供接口。
传输层的作用主要:
(1)传送规则,也就是控制帧结构、执行仲裁、错误检测、出错标定、故障界定。
(2)总线上什么时候开始发送新报文及什么时候开始接收报文,均在传输层里确定。
(3)位定时的一些普通功能也可以看作是传输层的一部分。
(4)传输层的修改是受到限制的。
物理层的作用:
在不同节点之间根据所有的电气属性进行位信息的实际传输。当然,同一网络内,物理层对于所有的节点必须是相同的。尽管如此,在选择物理层方面还是很自由的。
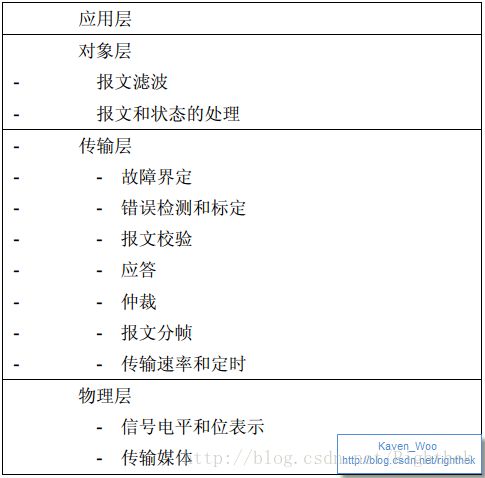
图1 CAN协议所对应的ISO模型
CAN具有以下的属性:
(1)报文(Messages):简单来说就是具有固定格式的数据包。
(2)信息路由(Information Routing):即,报文寻找结点的方式。
(3)位速率(Bit rate):数据位的传输速度。
(4)优先权(Priorities):即报文发送的优先权。
(5)远程数据请求(Remote Data Request):通过发送远程帧,需要数据的节点可以请求另一节点发送相应的数据帧。
(6)多主机(Multimaster):总线空闲时,任何结点都可以开始传送报文。
(7)仲裁(Arbitration):当2个及以上的单元同时开始传送报文,那么就会有总线访问冲突。仲裁是确定哪个单元的具有发送优先权。
(8)安全性(Safety):CAN的每一个节点均采取了强有力的措施以进行错误检测、错误标定及错误自检。
(9)错误检测(Error Detection):包括监视、循环冗余检查、位填充、报文格式检查。
(10)错误检测的执行(Performance of Error Detection)
(11)错误标定和恢复时间(Error Sinalling and Recovery Time):任何检测到错误的结点会标志出已损坏的报文。此报文会失效并将自动地开始重新传送。如果不再出现新的错误,从检测到错误到下一报文的传送开始为止,恢复时间最多为29个位的时间。
(12)故障界定(Fault Confinement):CAN结点能够把永久故障和短暂扰动区分开来。永久故障的结点会被关闭。
(13)连接(Connections):CAN串行通讯链路是可以连接许多结点的总线。理论上,可连接无数多的结点。但由于实际上受延迟时间或者总线线路上电气负载的影响,连接结点的数量是有限的。
(14)单通道(Single Channel):总线是由单一进行双向位信号传送的通道组成。
(15)总线值(Bus value):总线可以具有两种互补的逻辑值之一:“显性”(可表示为逻辑0)或“隐性”(可表示为逻辑1)。
(16)应答(Acknowledgment):所有的接收器检查报文的连贯性。对于连贯的报文,接收器应答;对于不连贯的报文,接收器作出标志。
(17) 睡眠模式/唤醒(Sleep Mode / Wake-up):为了减少系统电源的功率消耗,可以将CAN器件设为睡眠模式以便停止内部活动及断开与总线驱动器的连接。CAN器件可由总线激活,或系统内部状态而被唤醒。
1、CAN总线的报文格式
CAN传输的报文,可分为五种类型:
(1)数据帧:用于发送结点向接收结点传送数据的帧。
(2)远程帧:总线结点发出远程帧,请求发送具有同一识别符的数据帧。
(3)错误帧:任何结点检测到一总线错误就发出错误帧。
(4)过载帧:过载帧用以在先行的和后续的数据帧(或远程帧)之间提供一附加的延时。
(5)帧间隔:用于将数据帧及远程帧与前面的帧分离开来的帧。
数据帧由7个不同的位场组成:

数据帧有标准格式和和远程格式,以下是其格式表示:
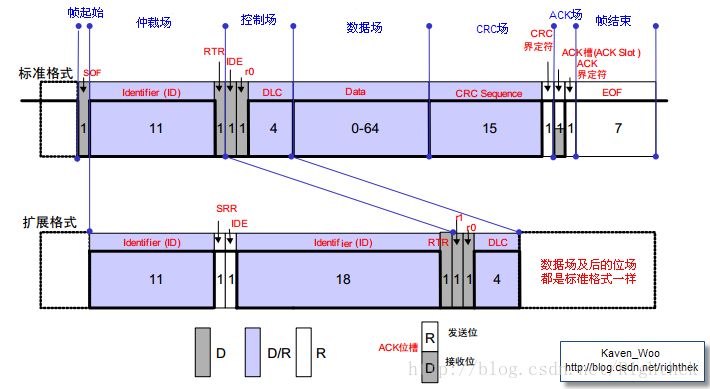
图2 数据帧格式
远程帧由6个不同的位场组成:

远程帧没有数据帧的数据场,以下是其格式表示:
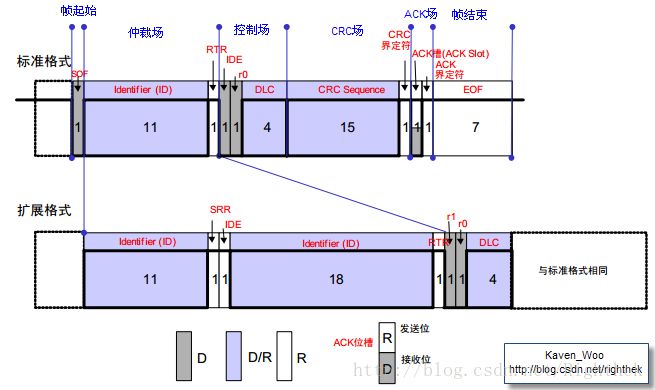
图3 远程帧格式
错误帧用于在接收和发送消息时检测出错误,通知错误的帧。错误帧由错误标志和错误界定符构成。
错误标志包括主动错误标志和被动错误标志两种。
主动错误标志:6个位的显性位,处于主动错误状态的单元检测出错误时输出的错误标志。
被动错误标志:6个位的隐性位,处于被动错误状态的单元检测出错误时输出的错误标志。
错误界定符由8个位的隐性位构成。
错误帧格式如下表示:
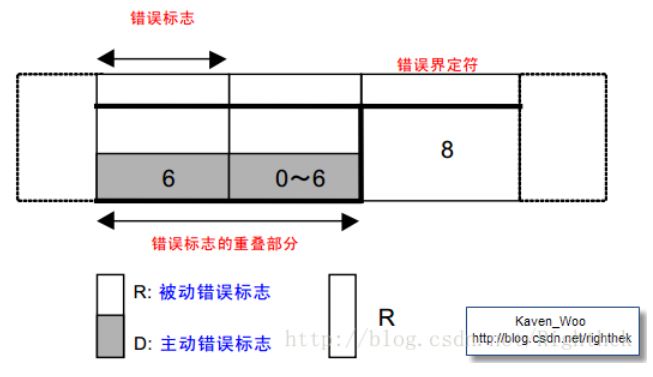
图4 错误帧格式
过载帧是用于接收单元通知其尚未完成接收准备的帧。过载帧由过载标志和过载界定符构成。过载帧格式如下表示:
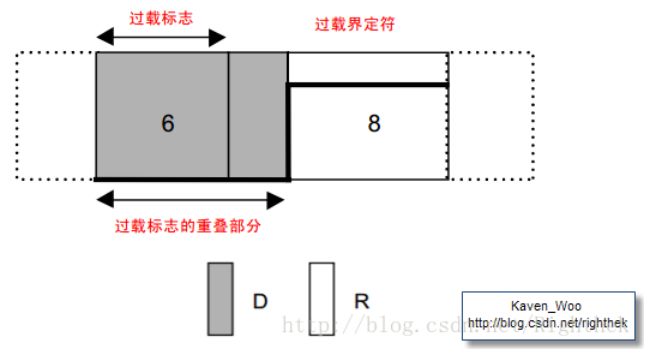
图5 过载帧格式
帧间隔是用于分隔数据帧和远程帧的帧。数据帧和远程帧可通过插入帧间隔将本帧与前面的任何帧(数据帧、远程帧、错误帧、过载帧)分开。过载帧和错误帧前不能插入帧间隔。帧间隔如下图所示:
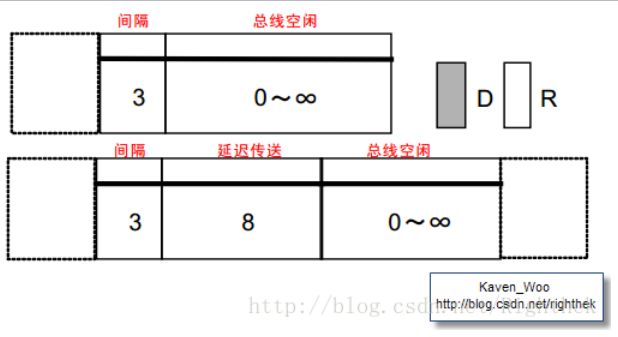
图6 帧间隔格式
2、CAN总线的仲裁方式
在总线空闲态,最先开始发送消息的单元获得发送权。多个单元同时开始发送时,各发送单元从仲裁段的第一位开始进行仲裁。连续输出显性电平最多的单元可继续发送。即逐位地对比各个结点发出的报文ID。由于线与的关系,显示位“0”可以覆盖隐性位“1”,因此ID最小的节点赢得仲裁,总线上表现为该结点的报文,其他结点失去仲裁,退出发送,转为接收状态。
标准格式ID与具有相同ID的远程帧或者扩展格式的数据帧在总线上竞争时,标准格式的RTR位为显性位的具有优先权,可继续发送。
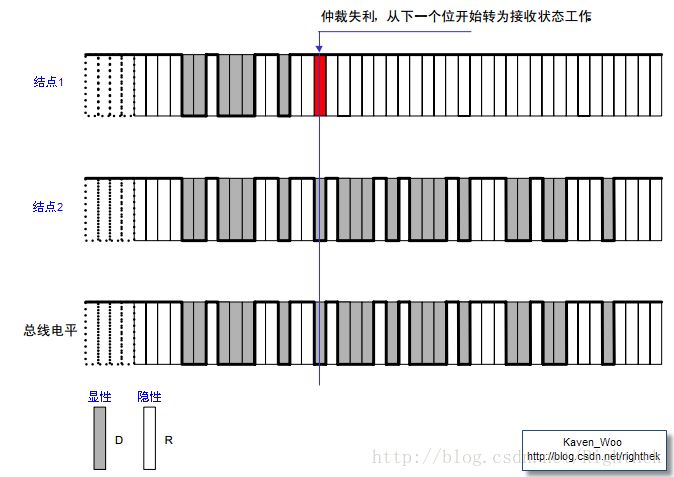
图7 仲裁方式
3、位填充(BitStuffing)
位填充是为了防止突发错误而设定的功能。位填充的规则如下:
(1)5位连续相同电平之后,必须填充一位反向位,即不允许有6个连续相同位;
(2)SOF之前为总线空闲状态,不需要同步,因此不需要位填充;
(3)CRC之后为固定格式,不允许填充;
(4)由CAN控制器自动实现;
4、CAN的错误处理
CAN控制器检测错误共有以下5种:
(1)位填充错误;
在使用位填充的帧场内,结点如果检测到6个连续相同的位值,则产生位填充错误,在下一位开始时,该结点将发送一个错误帧。
(2)位错误;
在发送期间,结点检测到总线的位值与自身发送的位值不一致时,则产生位错误,在下一位开始时,该结点将发送一个错误帧。
(3)CRC错误;
接收结点计算的CRC码与数据帧本身自带的CRC码不一致,接收结点将丢弃该帧,并在ACK界定符之后发送一个错误帧。
(4)应答错误;
发送结点在ACK Slot位会发送隐性位,同时监听总线是否为显性位,如果是显性位,则表明至少一个节点正确收到该帧;如果是隐性位,将产生ACK错误,发送结点发送一个错误帧。
(5)格式错误;
发送结节在(CRC界定符、ACK界定符、帧结束EOF)固定格式的位置检测到显性位时,将发生格式错误,并发送一个错误帧。
5、CAN总线同步
CAN总线的通信方式为NRZ方式。各个位的开关或者结尾都没有附加同步信号。发送结点以与位时序同步的方式开始发送数据。另外,接收结点根据总线上电平的变化进行同步并进行接收工作。
但是,发送结点和接收结点存在的时钟频率误差及传输路径上的(电缆、驱动器等)相位延迟会引进同步偏差。因此接收结点需要通过同步的方式调整时序进行接收。
同步的作用是尽量使本地位时序与总结信号的位时序一致(本地同步段与总结信号边沿同步)。只有接收结点需要同步;同步只会发生在隐性到显性电平的跳沿。
同步的方式为硬件同步和再同步。
-
CAN
+关注
关注
57文章
2757浏览量
463939 -
Linux
+关注
关注
87文章
11322浏览量
209867 -
Socket
+关注
关注
0文章
212浏览量
34748
原文标题:嵌入式Linux下的Socket CAN驱动理解
文章出处:【微信号:gh_c472c2199c88,微信公众号:嵌入式微处理器】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
嵌入式Linux下的USB设备驱动技术
基于嵌入式LINUX下CAN设备驱动程序设计
嵌入式Linux字符设备驱动的设计与应用
嵌入式Linux字符设备驱动的设计与应用

嵌入式Linux系统和驱动开发
嵌入式Linux下CAN接口调试
嵌入式linux报警,嵌入式Linux下LED报警灯驱动设计及编程.doc






 工商网监
工商网监
评论