 基于FMCW环扫SAR雷达体制成像系统的设计及其测试方法
基于FMCW环扫SAR雷达体制成像系统的设计及其测试方法
合成孔径雷达(SAR)的成像受天气影响较小,且不受白天黑夜的制约,所以在航海、军事等领域有着广阔的应用前景。环扫SAR的概念于1990年由KLAUSING H等人提出[1],与传统直线SAR相比,具有360°的成像视野,高方位向的分辨率和扫描速度以及实现短时间内获得大范围成像效果的优势[2-4],有着广泛的应用前景。调频连续波(Frequency Modulated Continuous Wave,FMCW)SAR与传统脉冲SAR相比,优势在于其轻便、发射功率小[5-6]、隐蔽性高且分辨率高。FMCW体制下的环扫SAR结合二者优点,对于其成像系统研究具有实用意义。
本文基于FMCW环扫SAR雷达体制,提出一种目标距离向成像系统的设计及其测试方法。该设计根据实际所需分辨率和探测距离设计了多种模式,每种模式均对应特定的波形参数。根据FMCW体制,目标的距离向成像采用去调频的方式获得目标回波的差拍频信号,对该信号频率分析后得到最终结果[7]。由于模拟前端实际采集的回波信号要求的分辨率高,因此频率分析的数据量巨大,为满足数据实时性处理的需求,成像系统由模拟前端完成去调频处理后,所得模拟信号经采样量化得到数字信号[8],送至FPGA数字下变频处理,得到目标的距离向成像数据。
本文首先通过MATLAB模拟某一工作模式目标回波的去调频信号,经由FPGA数字下变频得到距离向数据,加载至MATLAB观测信号频谱确认与设计的工作模式代表的距离参数是否一致。得到一致性的结果后,通过模拟前端的闭环方式得到目标距离为0时的去调频信号并加载至FPGA,观测频谱验证该成像系统的可行性和正确性。
1设计原理
1.1 雷达波形参数设计
FMCW环扫SAR雷达系统主要由发射机、频综器、接收机、信号处理板、转台和收发天线组成。频综器接收到来自上位机的波形配置参数产生相对应频率范围在9.4~9.6 GHz的射频信号和本振信号,前者送入发射机放大后通过发射天线送往自由空间,后者送入接收机,与来自接收天线的回波信号进行降载频及去调频处理得到57.5~62.5 MHz的中频信号,然后将中频模拟信号送入信号处理板进行距离向成像处理。雷达参数见表1。

根据不同分辨率和探测距离要求,在FMCW体制中设计了10种工作模式下的发射和接收波形参数。雷达发射波形可表示为:

其中,f0是信号的载波频率,K=-B/T为信号的调频斜率,B为信号的带宽,T为信号的扫频周期,也是信号的工作周期。选取能够分别代表近、中、远3种探测距离的波形参数,见表2。

1.2 雷达波形参数分析
为实现距离向的高分辨率,FMCW距离向处理采用差拍频傅里叶变换技术,降低采样率。差拍频的范围由最近、最远斜距决定。距离分辨率只与发射信号带宽有关,带宽越大,距离分辨率越高。
本雷达发射波形最大扫频带宽B=30.5 MHz,理想距离分辨率为:

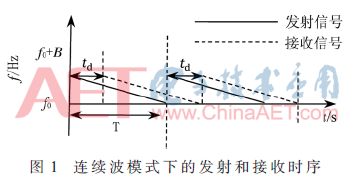
在整个工作周期内,FMCW信号一直在发射,接收时间相对发射有时间延时td(不同工作模式时不同),其时序如图1所示,T为工作周期,B为扫频带宽。
考虑了回波延时的影响后,目标距离分辨率为:

在FMCW体制中,在不同的探测距离上有不同的距离分辨率。距离越远,分辨率越差。表2给出的参数验证了此结论。
2距离向成像系统设计
2.1 FMCW距离向成像原理
差拍频傅里叶变换技术是脉冲压缩方法中的一种。其原理是将回波线性调频信号和具有相同调频斜率的线性调频参考信号的共轭相乘[9-10](去调频处理),获得目标的差拍信号,用频谱分析的方法分析此差拍信号的频率,达到脉冲压缩的目的。
根据式(1),可以得到时延回波:

其中,τ=2d/c为目标引起回波相对于发射波产生的时延。
该环扫SAR接收体系采用两级混频得到中频信号,一级混频用于降低信号频率,二级混频用于去调频处理。
不考虑幅度影响,一本振信号相位设为:
其中,Δf1为一本振与主振的载频频差,f20为二本振的载波频率,tx=2Rmax/c为二本振更新脉冲时延,由探测距离决定,相关参数见表2的接收延迟参数。
接收信号通过两级混频得到中频信号相位:

由上式知,回波信号的频率与时延tx有关,即与探测距离有关,对中频信号进行FFT即可得到中频信号的频率[11]。
2.2 数字化系统设计
去调频处理在接收机内完成,得到模拟中频信号。为使得能在FPGA中完成距离向成像处理,在接收机和FPGA间加入AD采集模块。图2所示为FMCW体制距离向成像方法的4大组成模块:去调频、AD采集、数字下变频(DDC)和傅里叶变换(FFT)。其中去调频模块在接收机内完成,AD采集、DDC和FFT模块均由FPGA实现。

AD采集模块将模拟中频信号转为数字信号。DDC主要实现对频谱的搬移和降速处理,得到基带信号,包括NCO、CIC抽取器、混频器及FIR滤波器。通过带通采样,得到数字回波信号,NCO 产生两路正交本振信号提供给混频器, 混频器得到本振信号与数字回波信号的乘积,信号此时被搬移至基带,CIC抽取器对该基带信号进行降速处理,即按倍数抽取,再通过FIR滤波器获得需要的频段信号,最后进行FFT变换。
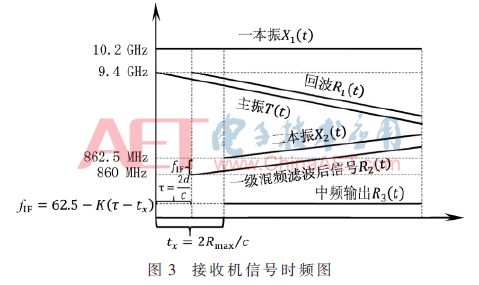
当接收天线接收到目标的反射信号后送入接收机去调频处理。根据式(8)以及该环扫SAR在FMCW体制实际情况中载频f0有9.2 GHz、9.4 GHz和9.6 GHz 3种,使用的频差Δf1=800 MHz、二本振载频f20=862.5 MHz。接收机中频信号可以表示为:

以载频9.4 GHz为例,给出接收机内部信号时频图,如图3所示。
为模拟后续模块成像方法,用信号发生器模拟中频输出中心频率60 MHz,带宽5 MHz。设置带通采样频率为48 MHz,采样后中频信号中心频率变为12 MHz,带宽不变,送入DDC。
设计NCO产生12 MHz正弦波的本振信号,对实信号采样的单路信号正交混频得到I、Q两路信号,再通过一个低通滤波器滤除混频产生的高频分量,得到基带信号,带内频率范围为-2.5~2.5 MHz。为减轻后续信号处理的压力,该基带信号经过CIC抽取器降速处理,具体抽取值根据工作模式决定,所得信号送入低通滤波器进行滤波和整形后,判断输出数据是否满足8 192个点,若有点数不足8 192的,对该信号补零,若满足8 192点,则不进行补零处理。完成后对8 192点数据进行FFT变换,取出需要进行方位向成像距离元送入DSP进行后续处理。
3距离向成像测试方法
3.1 FPGA与MATLAB板级系统仿真
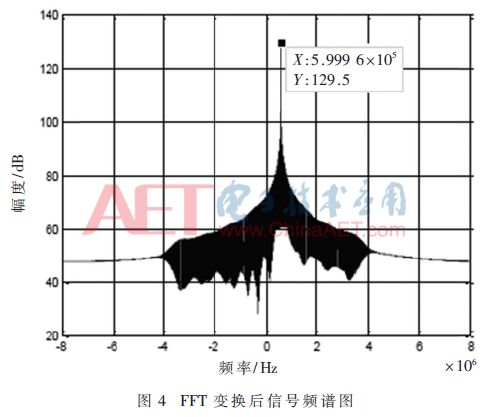
仿真时,以NCO为信号源产生11.4 MHz的正弦波,模拟接收机输出的中频信号59.4 MHz。NCO产生本振信号12 MHz。混频后得到差频信号-0.6 MHz,和频信号-23.4 MHz,通过低通滤波器后保留了混频后所需的差频信号-0.6 MHz。CIC抽取选取工作模式1,抽取倍数为3,实现3倍抽取降速处理。FFT变换后产生I、Q两路信号,将数据导入MATLAB,仿真结果如图4所示。
3.2 FMCW距离向成像板级闭环测试
现场测试时,微波源产生信号处理板需要的时钟48 MHz,同时根据波形参数产生接收机所需的一本振、二本振信号。由于是闭环测试,因此微波源产生的主振信号作为接收机的输入,同时为避免信号过大损坏接收机,在二者间接入30 dB衰减器。与仿真一致,以工作模式1为例,给出FMCW环扫SAR体制距离向成像板级实测结果。
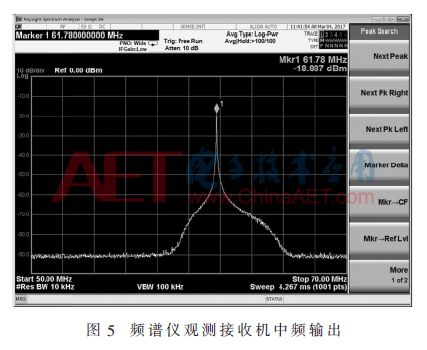
在接收机内去调频处理后的中频信号输入至信号处理板AD采集。根据式(9),由于闭环测试,回波延时τ=0,接收机输出中频信号频率61.77 MHz。将接收机中频输出直接接入频谱仪观测,如图5所示。
用Signal Tap抓取AD采集、DDC各模块以及FFT输出数据,导入MATLAB得到信号频谱如图6所示。中频信号经带通采样,得到13.77 MHz的信号,NCO产生12 MHz的本振信号。混频得到1.77 MHz和-25.77 MHz两个频率,由于本振信号的串扰,混频后输出存在12 MHz的串扰信号。经滤波输出后,该串扰的本振信号被滤除。CIC滤波器在工作模式1时抽取倍数为3,抽取后数据率是原信号的1/3,信号频率保持不变,抽取以及滤波输出信号频谱如图6所示,最后做FFT得到信号距离向频谱。

根据频谱仪显示结果,接收机中频信号频率为61.769 MHz,带通采样后得到13.769 MHz的信号,经DDC得到1.769 MHz的基带信号。实际得到的信号频率为1.768 MHz,根据式(9)换算成距离为-1.2 m,工作模式1的距离分辨率为5 m,误差在允许的范围内。
为验证该系统能应用于多模式场景,分别给出代表中距离和远距离模式的闭环实测结果,并与接收机输出值频谱仪观测结果对比。根据表2,选择工作模式3和工作模式5测试。
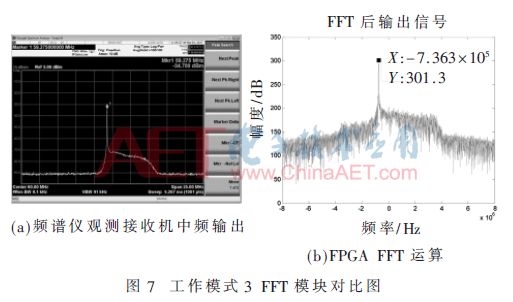
中距离工作模式3时,接收机中频输出理论值59.263 MHz,经DDC得到-0.737 MHz基带信号,实际得到的信号频率为-0.736 MHz,换算成距离为4.9 m,距离分辨率为6.8 m,满足误差要求。其FFT模块输出和接收机直接接入频谱仪观测对比图如图7所示,图7(a)为接收机输出接入频谱仪观测,图7(b)为FFT后输出。
远距离工作模式5时,接收机中频输出理论值59.437 MHz,实际值为59.275 MHz,经DDC得到-0.563 MHz基带信号,实际信号频率为-0.559 6 MHz,换算成距离为43.49 m,距离分辨率为36 m。接近3个距离元的差别,此实际值与理论值的差别由于中频输出存在系统误差,需要后续进行校正。其FFT模块输出和接收机直接接入频谱仪观测对比图如图8所示,其中图8(a)为接收机输出接入频谱仪观测,图8(b)为FFT后输出。

4结论
本文针对FMCW环扫SAR目标距离向探测需求,提出了一种基于FMCW环扫SAR的成像系统的设计及测试方法。该设计包含去调频处理、AD采集、DDC和FFT等模块设计。在FPGA中构建NCO、混频器、CIC抽取器和FIR滤波器等硬件电路,并将程序下载进行模拟实测板级测试,所采集数据送入MATLAB产生距离向信号频谱并分析。模拟实测板级测试实现预期目的后进行现场闭环测试。测试结果表明,该系统实现了FMCW体制下的环扫SAR距离向成像。
-
成像系统
+关注
关注
2文章
196浏览量
13938 -
合成孔径雷达
+关注
关注
2文章
19浏览量
12152
原文标题:【学术论文】基于FMCW环扫SAR的成像系统设计及测试方法
文章出处:【微信号:ChinaAET,微信公众号:电子技术应用ChinaAET】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
合成孔径雷达系统综合测控器的研制
24GHz微波雷达FMCW测距系统设计概述
24GHz ADAS 雷达评估系统的搭建、评估与测试
基于FMCW的大斜视SAR成像研究
线性相位误差对FMCW SAR成像质量的影响
ADI发布新款PLL合成器,用于实现高性价比FMCW雷达系统
多载频FMCW在MIMO雷达中的应用研究
FMCW雷达系统及其前端数据采集模块设计

去除回波频谱调制的直升机SAR成像
FMCW和线性调频脉冲雷达
FMCW激光雷达原型验证和测试
毫米波FMCW雷达的SAR成像算法介绍





 工商网监
工商网监
评论