 自适应控制的分类_自适应控制的主要类型
自适应控制的分类_自适应控制的主要类型
什么是自适应控制
1、自适应控制所讨论的对象,一般是指对象的结构已知,仅仅是参数未知,而且采用的控制方法仍是基于数学模型的方法。
2、但实践中我们还会遇到结构和参数都未知的对象,比如一些运行机理特别复杂,目前尚未被人们充分理解的对象,不可能建立有效的数学模型,因而无法沿用基于数学模型的方法解决其控制问题,这时需要借助人工智能学科,也就是智能控制。
3、自适应控制与常规的控制与最优控制一样,是一种基于数学模型的控制方法。
4、自适应控制所依据的关于模型的和扰动的先验知识比较少,需要在系统的运行过程中不断提取有关模型的信息,使模型愈来愈准确。
5、常规的反馈控制具有一定的鲁棒性,但是由于控制器参数是固定的,当不确定性很大时,系统的性能会大幅下降,甚至失稳。
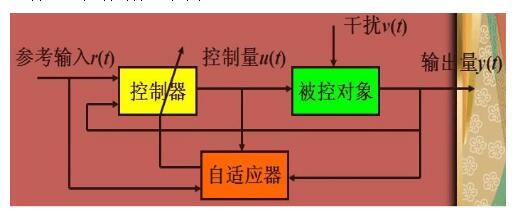
自适应控制的原理框图
自适应控制的分类
自从50年代末由美国麻省理工学院提出第一个自适应控制系统以来,先后出现过许多不同形式的自适应控制系统。比较成熟的自适应控制系统有下述几大类。
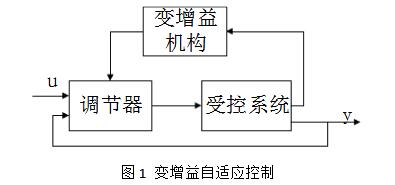
(1) 可变增益自适应控制系统
这类自适应控制系统结构简单,响应迅速,在许多方面都有应用。其结构如图1所示,调节器按被控过程的参数的变化规律进行设计,也就是当被控对象(或控制过程)的参数因工作状态或环境情况的变化而变化时,通过能够测量到的某些变量,经过计算而按规定的程序来改变调节器的增益,以使系统保持较好的运行性能。另外在某些具有非线性校正装置和变结构系统中,由于调节器本身对系统参数变化不灵敏。采用此种自适应控制方案往往能去的较满意的效果。
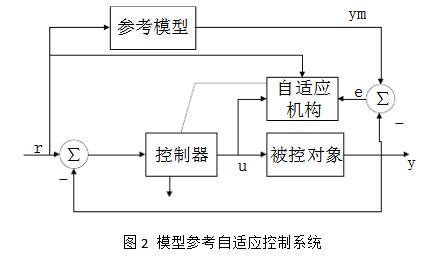
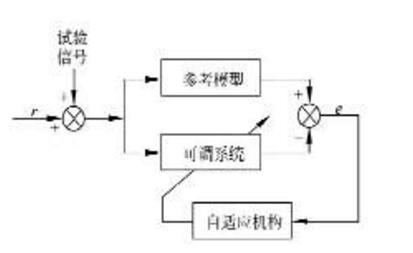
(2) 模型参考自适应控制系统(Model Reference Adaptive System,简称MRAS)
模型参考自适应控制系统由以下几部分组成,即参考模型、被控对象、反馈控制器和调整控制器参数的自适应机构等部分组成,如图2所示
设计这类自适应控制系统的核心问题是如何综合自适应调整律,即自适应机构所应遵循的算法。关于自适应调整律的设计目前存在两类不同的方法。其中一种称为局部参数最优化地方法,即利用梯度或其他参数优化的第推算法,求得一组控制器的参数,使得某个预定的性能指标,如J=∫e2(t)dt,达到最小。最早的MIT自适应律就是利用这种方法求得的。这种方法的缺点是不能保证参数调整过程中,系统总是稳定的。自适应律的另一种设计方法是基于稳定性理论的方法,其基本思想是保证控制其参数自适应调节过程是稳定的,然后再尽量是这个过程收敛快一些。由于自适应控制系统是本质非线性的,因此这种自适应律的设计自然要采用适用于非线性系统的稳定理论。Lyapunov稳定性理论和Popov的超稳定性理论都是设计自适应律的有效工具。由于保证系统稳定是任何闭环控制系统的基本要求,所以基于稳定性理论的设计方法引起了更为广泛的关注。
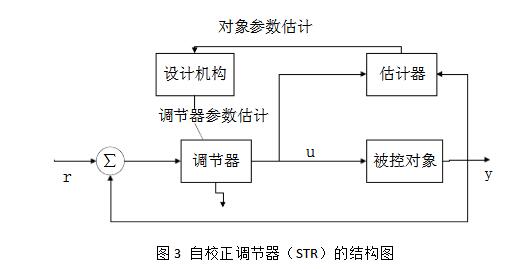
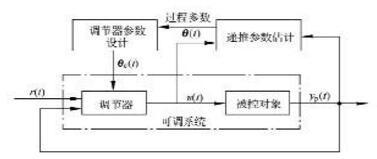
(3) 自校正调节器(Self-tuning Regulator,简称STR)
这类自适应控制系统的一个特点是具有一个被控对象数学模型的在线辨识环节,具体地说是加入了一个对象参数的递推估计器。由于估计得是对象参数,而调节器参数还要求解一个设计问题方能得出,所以这种自适应控制系统可以用图3的结构描述。这种自适应调节器也可设想成为内环和外环来年各个环路组成,内环包括被控对象和一个普通的线性反馈调节器,这个调节器的参数由外环调节,外环则由一个递推参数估计器和一个设计机构组成。这种系统的过程建模和控制的设计都是自动进行,每个采样周期都要更新一次。这种结构的自适应控制器称为自校正调节器,采用这个名称为的是强调调节器能自动校正自己的参数,已得到希望的闭环性能。
(4) 自寻最优控制系统
自寻最优控制系统是一种自动搜索和保持系统输出位于极值状态的控制系统。先前这种系统称为极值控制系统。在这种系统中,受控系统的输入—输出特性至少有一个代表最优运行状态的极值点或其他形式的非线性特性。因此,受控对象是非线性的。如果极值特性在运行过程中不发生变化,则可通过分析和试验找到一个能使系统工作在极值位置的固定控制量,这时由常规控制便可保持最优运行状态。不过,许多工业对象的极值特性在运行中都或多或少会发生漂移,因而无法采用常规控制策赂。对于这类受控系统,采用自寻最优控制策略便可自动保持极值运行状态,使运行状态的梯度为零。
此外,自寻最优控制系统还具有易于理解和实现方便等优点,所以它在工业中也有广泛的应用。
(5) 学习控制系统
这是一类按行为科学进行处理的控制系统,它比上述各类自适应控制系统都更加复杂。这种系统的先验信息相当缺乏,为了保证有效的工作,它一般应具有识别、判断、积累经验和学习的功能。由IEEE的“自适应学习和模式识别标准与定义小组委员会”提出的定义如下:
定义(学习系统) 一个系统,如果能对一个过程或其环境的未知特征有关的信息进行学习,并将所得的经验用于未来的估计、分类、决策或控制,以改善系统的性能,则称此系统为学习系统。若一个学习系统以其学得的信息用来控制一个具有未知特征的过程,则称为学习控制系统。根据学习时是否需要接收外部信息,学习过程可分为两类:监督学习和无监督学习。在实际应用中,常将两种学习方式组合使用。首先通过监督学习获取尽可能多的先验信息,然后改为无监督学习,以使收到最好的学习效果。学习系统的形式有模糊自适应控制和专家或智能自适应控制。
研究学习过程的数学方法很多,在学习控制系统中采用的方法有:采用模式分类器的可训练系统、增量学习系统、Bayes估计、随机逼近、自动机模型和语言学方法等。学习系统理论的应用不限于控制工程,在计算机科学、经济和社会等领域中也有应用。
其他自适应控制系统还有混合自适应控制、非线性控制对象自适应控制、模糊自适应控制、神经网络自适应控制等等。
自适应控制的主要类型
自适应系统有两类,一类是模型参考自是要控制系统(model reference adaptive system,MRAS);另一类是自校正控制系统(self-tuning control system),这类自适应系统的一个主要特点是在线辨识对象数学模型的参数,进而修改控制器的参数。
1、模型参考自适应控制系统
这类自适应控制系统设计方法的理论基础为局部参数优化方法、李雅普诺夫稳定性理论和波波夫(Popov)超稳定性理论。
2、自校正控制系统
自适应控制系统的应用
1、战术导弹的自校正控制
战术导弹在整个飞行过程中,由于飞行速度和高度的变化,使弹体参数剧烈变化,严重地影响了控制性能。当用经典控制理论设计自动驾驶仪时,一般采用舵回路、阻尼回路和加速度回路来减弱参数变化对系统的影响,但用这种方法不能完全消除参数变化对系统的影响。为了进一步提高导弹的控制性能,有必要采用自适应控制。
自校正控制是自适应控制的一种,它适用于结构已知,但参数未知而恒定或参数缓慢变化的系统。采用自校正控制需要辨识被控系统的参数,并自动校正控制作用,达到预期的控制效果。用自校正控制技术设计自动驾驶仪,能够使被控系统适应参数变化,保持较好的性能。
2、 空间环境模拟器自适应控制
随着航天技术的发展,对航天器零部件的可靠性要求越来越高。为了确保航天器在太空可靠远行,航天器零部件必须在地面进行真空冷热浸试验、真空交变试验等各种空间环境模拟试验。空间环境模拟器就是提供这种条件的一套试验设备。
由于控制过程的复杂性和不能对被控对象进行事先测定以及在控制过程中希望不要人工干预等,用PID调节器,每做一次环境模拟试验,都要调试Kp、Ki、Kd等参数,非常麻烦,且保证不了过渡过程中超调调小于2℃的要求。用一般最佳控制,其状态方程的参数无法确定。用自校正调节器,需要知道滞后步数Ko和一次性测试βo ,而空间环境模拟器无法事先知道Ko,又无法确定βo,因为稳态和初治状态的βo差别很大、自校正调节器不适合于过渡过程控制,特别是本系统对过渡过程超调的要求很高。经多次实验均告失败。自校正控制器也因需要试凑控制权而遇到困难。总之,采用前述的各种方法,都无法衡足实验任务的要求。全系数自适应控制方法的提出,就是为了解决这个问题。
在航海方面瑞典Astrom等人首先在大型油轮上采用了自适应控制的自动驾驶仪,取代了原有的PID调节器的自动驾驶仪。实验证明,自适应自动驾驶仪能够在变化复杂的随机环境(例如,在海浪、潮流、阵风的干扰以及在不同载荷不同的航速)下,都能使油轮按照预定的航迹稳定而可靠地航行。并取得了良好的经济效益。
在化工过程方面,在钢铁和冶金工业方面许多工艺过程为非线性、非平稳的复杂过程,原材料成份的改变,催化刑的老化和设备的磨损等,都可能使工艺参数发生复杂而复杂较大的变化,对于这类生产过程,采用常规的PID调节器往往不能很好地适应工艺参数的变化而导致产品的产量和质量不稳定。当采用自适应控制后,由于调节器的参致可以随工艺参数的变化而按某种最优性能自动整定,从而保证了产品的产量和质量不随工艺参数的变化而下降,于是在十多年前即有人提出采用自适应控制来代替常规的PID调节器。目前在板轧机的厚厚度,带钢热轧机的张力,水泥的配料造纸等方面都有不同程度的自适应控制作用,并取得了较好的效果。
在电力系统方面六十年代即出现对锅护燃烧效率的优比控制,且在热交换器上采用自适应控制技术使控制参数最优地适应发电机和各种负荷条件。到了七十年代自适应控制技术在火力发电站和水力发电站上的应用也获得了成功,并在原子能电站上进行了试验所究。
在电力拖动力面,已经用自适应控制对电动机的转矩、转速、位置和功率进行有效的的控制。目前,有人研究对交流感应电动机的转速采用自适应控制以达到当系统在运行过程中其惯性、负载力矩、时间常数和系统增益在大范同内变化时,系统的动态相应应仍可保持在期望值附近的目的。在非化工业领域中,如社会、经济、管理、生物、医学等等方面包有了一些探索。近来,宏观经济系统的随机最优化问题也引起了人们的注意。
我们完全可以预测,随着控制理论和电子计算机技术的发展,自适应控制的应用将会愈来愈广泛,所获得的效益会愈来愈大。
-
自适应控制
+关注
关注
1文章
36浏览量
11790
发布评论请先 登录
相关推荐
[下载]交直流传动系统的自适应控制
阈值自适应关联分类方法研究





 工商网监
工商网监
评论