 LoRaWAN定位的技术要点及定位的应用案例
LoRaWAN定位的技术要点及定位的应用案例
白皮书介绍
LoRaWAN™可以为低功耗广域网提供定位解决方案,为一系列电池供电的应用终端提供所需的位置信息。任何正在工作的LoRaWAN终端都支持定位功能,而不需要增加额外的BOM成本,并且不需要额外的处理能力。
适读群体
这篇白皮书的读者是打算开发定位功能应用的LoRaWAN服务提供商、企业和终端设备制造商。本文将阐述LoRaWAN定位的技术要点,重点突出适合于LoRaWAN 定位的应用案例,并提供几个部署的研究案例。
定位技术比较
LoRaWAN TDOA/RSSI
• 成本最低的方案,任何LoRaWAN终端都生来具备;
• LoRaWAN支持长电池寿命应用的案例;
• TDOA:视情况而定的定位精确度为20-200m;
• RSSI: 1000-2000m的定位精确度;
WiFi 定位
•室内、外定位的高效解决方案
•精确度随着热点密度的增加而提高
BLE
•需要BLE信标系统
•室内定位方案
GPS/AGPS
•一个GPS的BOM成本是5-10美元
• 最精确但最耗电的方案
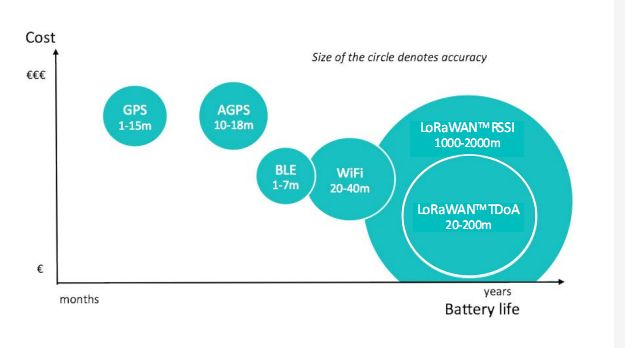
(图3.1 定位技术的比较)
上边的图片直观的展示了几种定位技术成本、准确性、功耗等方面的对比。
如上图所示,LoRaWAN协议提供了两种定位方法:基于接收信号强度指示(RSSI)的定位,用于粗定位;到达时间差(TDOA)定位,用于精准定位。本文将讨论TDOA定位,因为这种方案更适用于需要低功耗、电池供电设备的场景,定位精度范围是20-200米。
具有清晰的视距和推荐网关部署策略的郊区部署将在低部署规模情况下获得高的精确度。城市和密集的城市环境中多路径问题将会影响定位精度。所以一般来说,随着网关网络密度的增加定位精度也会提高。
一般来说,不需要频繁定位的终端能够获得最佳的电源效率。这些设备通常被设定为固定或者不经常移动的Class A终端。
这些终端的定位信息不需要增加额外的硬件成本。移动的终端需要更频繁的位置信息,它们会传输更多的数据帧、会消耗更多的电量、会增加硬件成本(如电池),这些终端通常会被设定为Class B 或者 Class C。使用更高的数据速率(例如SF7)有助于限制增加的电量需求。
本文的重点是室外、广域的定位。需要注意的是,LoRaWAN圈内正在使用各种方案提供了室内精度10米甚至更好地定位精度(网关密度100米,改进的时钟源,等)。这可以比拟定位精度1-3米的室内WiFi到达角(AOA)定位技术。
LoRaWAN定位能力
本节将提供了LoRaWAN TDOA定位和影响精度误差的理论概述。
1
架构
当一个LoRaWAN终端的上行数据被三个或三个以上基站接收到,那么它就可以被定位。这些上行数据并不需要是特定的位置信息,它们可以普通的LoRaWAN数据帧结构。多个基站同时接收到相同的上行数据,则终端的位置信息就可以通过多点定位技术得到。下图是多点定位的过程示意图。

(图4.1 定位架构图)
这里不需要额外的硬件支撑。但是基站确实需要精确地时间同步,现阶段这是通过基站内部的GPS实现的(或者任何可以在几十纳秒时间内与基站时钟进行同步的手段)。每个被接收到的上行帧都会获得网关精确的时间戳。这个时间戳将作为帧结构的一部分被转发到网络服务器,其中还包括了信号电平、信噪比和频率误差。
网络服务器将对同一个数据帧的多个接收进行排序,将所有包含该帧数据时间戳的元数据进行分组,并从定位解算器请求一个定位计算。在一个给定的帧结构中,基本的定位解算函数将计算不同基站接收的时间差,然后通过这个时间差可以测算出终端设备到不同基站的距离。
一旦两个基站的TDOA已知,那么这个终端的位置就可以被放在一个双曲线中。通过多次时间差的计算,终端的位置信息就可以呈现在多个双曲线上,那么最终这个终端的位置就应该在这些双曲线的交点处。
定位的精确度与以下几个因素有关:
传播环境和路径
网关部署策略和密度
用于定位的算法
网关时间同步的精度
终端设备的动态和结构
2
传播误差的影响
在一个多路径环境中,LoRaWAN 定位的性能受到网关时钟精度的限制。当信号的灵敏度为25dB时,定位测试通常能达到超过3m的精度。在灵敏度水平上,噪音可使精确度下降到60m。
在这些约束条件下,精度很少依赖于接收到的信号电平。在多路径的情况下,由于系统带宽被限制为125 KHz,信号路径通常难以区分,只有平均信道延迟可以估计。在某些情况下,直接信号路径不存在,由于只能看到反射路径,所以将延迟偏移量引入到帧时间戳中。
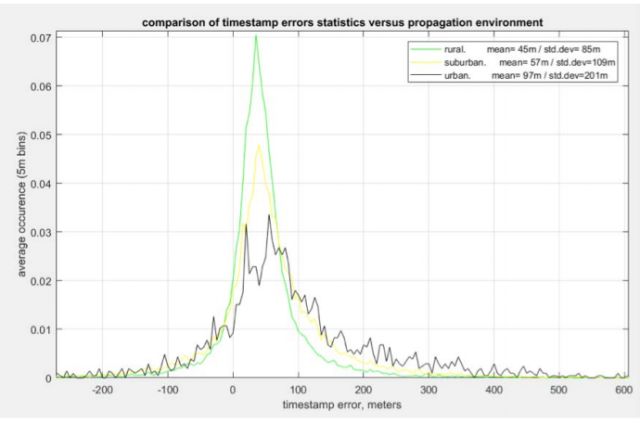
(图4.2 时间戳误差的统计)
图4-2显示了不同传播场景下时间戳误差的统计数据。这些测量数据从移动车辆测试中获得,并使用GPS估算时间戳误差。城市场景比其他场景数据点少(2000对比10000),这也解释了为什么代表城市的曲线长得“更难看”。从车辆到网关的平均距离为1.5km。
总体来说,时间戳总是滞后的。要注意,时间戳误差可能是负的,但它们永远不会小于-1/带宽(绝不低于系统的基本分辨率)。我们可以利用偏差将时间戳误差分类,这个偏差就是平均误差,并在这个平均值附近传播。随着传播环境恶劣,偏差增大,传播变宽。
有多种方法可以减少时间戳误差:
• 在不同的频点下重复帧
• 增加基站的天线(通常是两个)
• 增加网关部署的密度,可增加可用样本的数量和视距测量的机会,从而提高TDOA的准确性
• 降低基站的延迟帧的时间戳
• 引入带外传播误差修正,以减轻多路径(模拟,预测,校准或指纹识别)
定位求解器的设计的目的是为了减少多路径。求解器将选择进行处理的时间戳的队列集,而忽略剩余的。然后求解器通过数据的求解,得到终端设备的位置。多路径传播从根本上限制了系统的精确度,但基站部署策略也起着重要的作用。
3
部署策略的影响
和其他无线电系统一样(例如GPS,LORAN)LoRaWAN定位的精确性取决于网关与终端设备的位置关系。用于确定网关部署质量的指标是几何精度因子(Geometric Dilution Of Precision,GDOP),这是对接收网关相对几何的“优势”的度量。
每一次由定位求解器计算的差异定义了一个双曲曲线。双曲线是开放的曲线,所以当终端设备相对于基站处于不合适的位置时,双曲线的交叉会导致误差放大。
GDOP可以捕获这个误差的放大系数,它只依赖于基站和终端设备的几何位置关系。对于二维坐标内的定位,我们引入水平DOP (HDOP,水平精度因子)。当HDOP是1时,代表没有误差放大;如果基站显示了一个时间戳60m(即200ns)的不确定性,那么最终定位的不确定性就是60m。当HDOP是2时,最终的不确定性就是120m。当基站部署密度很高,HDOP也可以低于1。
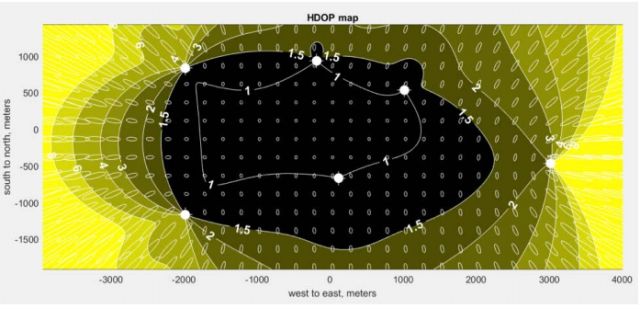
(图4.3 HDOP 地图)
图4-3模拟6个基站部署的HDOP地图。图中点代表网关,等高线区域为HDOP显示区。
中间区域,HDOP大于1并一直向两侧增大到大于8。在由网关组成的多边形之外区域,HDOP的增长非常快。而高HDOP大大降低了定位的准确性。
在常规空间中的白色不确定区域,既描述了位置误差的振幅,也描述了误差的方向(沿径向指向多边形的中心)。请注意地图的东侧,即使是在网关多边形区域中,HDOP也会带着较大的误差沿着南北轴达到2。这是由于沿该轴的网关密度较低。
这里需要提到的是,并不是基站的位置越近,定位效果就越好;最重要的是基站位置布局策略。与矩形的中间相比,在四个网关构成的正方形中间位置的定位精度会更好。
在覆盖多边形之外的糟糕表现应该是部署策略的问题。所以对于小规模或试点定位部署,强烈建议引入HDOP并进行网关位置选择优化。
4
时间误差的影响
GPS的接收质量同样也会影响精度。对于移动服务提供商来说,靠近手机站点的基站可能会经历周期性的GPS阻塞,因此必须使用特殊的天线。
在城市中低矮的屋顶或广告牌上安装的基站也会受到较少卫星的“城市峡谷”效应的影响。当GPS接收质量良好时,时基误差大约为25ns (<10m)。GPS并不是主要的误差来源,因为部署精度无法达到10m。但是在部署非常密集的LoRaWAN网络中,提高网关时钟精度可以进一步提高定位的精确度。
5
滤波提高定位精度
根据应用的不同,可以对定位求解器的输出结果进行滤波以获得更好的精确度。例如,如果已知终端设备位置固定,则可利用求解时间平均值来推导位置。卡尔曼滤波是一种通用的技术,可以从噪声观测中估测位置和速度(大多数定位系统使用的是卡尔曼模型)。
回到LoRaWAN 定位,由于预滤波的位置估计值是稀疏且有噪声的,所以滤波对定位性能有很大的影响。如果滤波器可以利用一个特定的终端设备的速度配置文件,就可以提高定位的精度。这些配置信息来源于终端本身(固定、移动等等),并且是特定应用指向的。
另外一个特定应用的用途是匹配滤波。例如,如果终端设备在仓库之间移动,过滤器首先将终端设备分为静止的或移动的。如果它是静止的,则可以认定它位于某个仓库中。如果它在移动,则它位于某条路径上。
对于低功耗的优化,LoRaWAN占空比在某些地区会有限制,这样一来终端设备每天只能传输有限数量的帧数。这种限制是LoRaWAN通信限制的一个方面,并不是特定于定位场景。实际中固定的设备比运动更容易定位,因为因为一些帧的数据可以更容易利用来过滤位置估计。
部署案例研究
1
巴塞罗那港口(Actility/Cisco)
LoRaWAN定位的一个例子是车辆定位。利用GPS来定位车辆已经有多年的历史。但是由于安装的复杂性和成本问题,并没有广泛推开。由于GPS定位都十分耗电,需要与电池连接。现在基于LoRaWAN TDOA定位,是新一代低功耗定位方案,已经可用。
在2017年的全球移动大会上,Actility和Cisco在ZAL港安装了6个IR829/IXM LoRaWAN网关,实现了ZAL港的专用LoRaWAN网络覆盖。ZAL管理系统可为港口内的公司提供安全、运维以及日常服务。
网络覆盖了港口内0.43平方公里的面积,6个网关间隔400~600米以确保良好的网络覆盖性。三层楼的金属建筑区域内并没有专门可以放置天线的高点,所以天线被直接安装在屋顶(次优配置)。
Abeeway定位终端安装在管理车辆上。定位终端在LoRaWAN TDOA模式下工作是最节能的定位方式。如果对于功耗方面考虑较少,使用LoRaWAN 上行来辅助GPS上报定位数据可用于需要更高精度的场景(10m内的精度)。
与典型的AGPS/GSM定位终端相比,LoRaWAN定位终端节省了50%以上的电能。并且由于是电池供电且无需其他电源,终端的安装十分简便,只需用胶粘、螺丝固定或者其他简单手段固定在车上。同时使用APP来实时监控ZAL港的在线车辆运行情况。
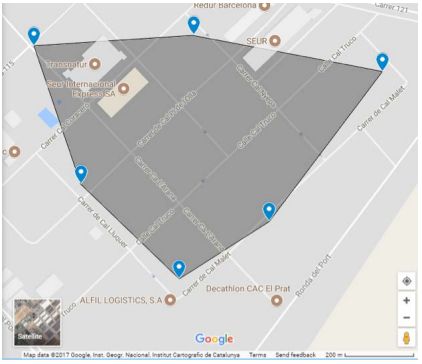
(图5.1 巴塞罗那ZAL港基站位置示意图)
在ZAL港口的案例中,应用程序会计算每辆车在经过每个建筑花费的时间(如,它停了多久)。物流区域的建筑通常比较稀疏,车辆停放的位置距离建筑物要大于80米,大多数车辆停放的时间在20分钟到12小时不等。停放车辆的追踪是TDOA定位的一个主要应用,定位终端每10分钟上报一次位置信息,可以得到60-80m的定位精度。当车辆静止时,定位求解器会对多个帧的数据进行平均,当车辆重新开始移动时候能够及时监测到。图5-2显示了固定车辆的位置精度。
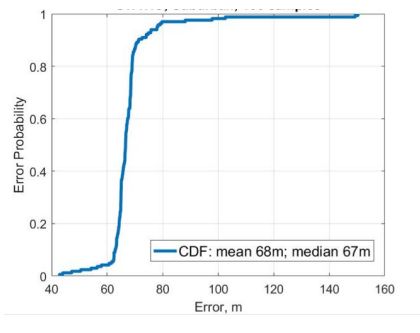
(图5.2 ZAL港口TDOA定位精度:固定车辆)
移动车辆的近似实时位置也可以通过TDOA进行定位。通过我们的测试一个移动的车辆可以被定位到的平均精度是171米。这足以判断车辆行驶的大致方向,以便了解它是否正在前往下一个地点,或在一天结束后返回停车点。
在这个案例中,定位精度并不是那么重要,因为定位信息在这里主要用于当车辆进出指定区域进行触发警报。图5-3显示了移动车辆的定位精度。
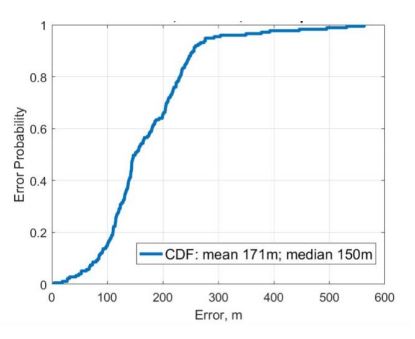
(图5.3 ZAL港口TDOA定位精度:移动车辆)
2
伊西莱穆利诺/布伦(Actility/Cisco)
思科和Actility在巴黎地区部署了5个IXM LoRaWAN网关以验证LoRaWAN定位能力。网络覆盖了伊西莱穆利诺和布伦的城区。基站采用了以太网或者移动网络进行数据回传,测试系统24小时运行,静止和移动测试节点能够生成用于定位应用开发的消息。
网络覆盖区域面积大概为1.6平方公里,四个基站间隔为900米至1300米,构成一个五角形区域,部署在布伦的第五个基站会应用在未来的测试中。该区域包括商业、市政和住宅,以及更开放的用地,如塞纳河、公园和体育场。天线安装在60m到126m的高度。
高点部署(如图5-4所示)可提供长距离覆盖,但地面覆盖效果有时也会受到影响。由于多山的地形,如要保证最佳的定位能力还需要增加基站的部署(每个定位终端的数据至少要被三个基站接收)。
(图5.4 伊西莱穆利诺/布伦网关部署示意图)
固定资产定位使用Adeunis V2测试设备进行,每20秒发送一次上行数据。每八个上行数据构成一个定位“帧”。定位终端配置一个“固定”的配置文件,支持自适应数据率。
在由网关相互连接构成的区域中(HDOP较好),定位精度可达到75-115m(近似标准偏差为25m)。在区域外围,定位精度是400m(HDOP较差)。这些结果与巴塞罗那ZAL港口的测试发现一致。图5-5提供了一个典型的定位图。其他的网关部署策略、固定和移动终端的测试还在进行中。
(图5.5 巴黎定位案例示意图)
3
纳沙泰尔(Semtech)
Semtech公司正在瑞士的纳沙泰尔城市环境中进行LoRaWAN定位测试。这座城市坐落在一个湖和一座山之间,并且有许多小山。所以从GDOP的角度来看,这是一个困难的案例。因为由于多山,会带来长的时延。图5-6中标示了6个基站和30个固定的室外测试点。
(图5.6 纳沙泰尔定位例子示意图)
图5-7展示了从30个测试点收到的不同数量的LoRaWAN帧的定位性能的累积分布函数。在单帧中平均定位精度约为150米, 8帧的精度提高到80米。这里没有用到滤波。
在不同的数据速率下进行了多组测试:SF7, SF10 和 SF12。它们的性能是完全相同的,说明多路径和GDOP才是影响性能的主要因素。GDOP越差,定位性能相应变差:8帧时,90%的定位精度仅为205米。
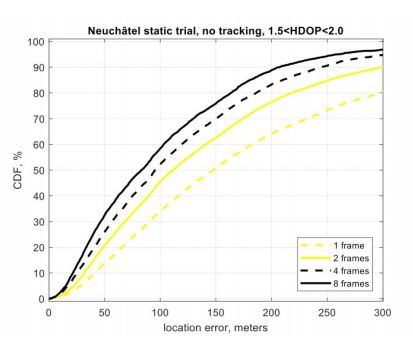
(图5.7 纳沙泰尔定位性能图)
4
姆科马齐国家公园(Semtech/Kerlink)
互联网生命和ShadowView基金会基于LoRaWAN正在开发追踪器以保护坦桑尼亚姆科马齐国家公园保护区内濒危的黑犀牛,借助Semtech和Kerlink公司的技术支持。无GPS的LoRaWAN追踪器体积更小、价格更低、耗电更少,并且不受配备GPS干扰器的盗猎者影响,同时与GPS追踪器相比,它们能更频繁地进行地理定位报告。
去年9月,第一个LoRaWAN追踪器被植入了一头犀牛的犀牛角,并让该公园的安全人员自己操作来定位、监控犀牛。
犀牛保护区是一个占地50平方公里的围栏区域。已经部署了四个支持定位的Kerlink网关来实现该区域的LoRaWAN覆盖。大门之间的距离在4公里到10公里之间。定位精度超过50m,在某些情况下超过20m。
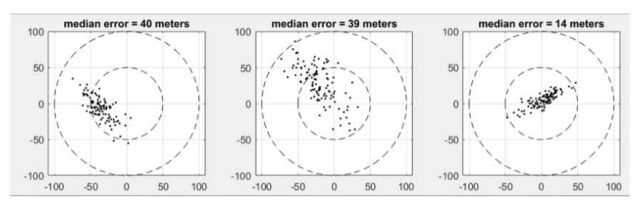
(图5.8 姆科马齐定位试点示意图(四帧))
图5-8展示了犀牛定位的例子,每个点使用四个帧来计算一个位置。前两个图中的平均误差为40m,而相应的测试点位于一个HDOP高于2的区域。第三图中HDOP为1.5。在这里测试点和网关的确切位置不能公开。区域内网络将进行更好的HDOP优化,自然公园其他区域的网络部署也已经完成了计划。
公园管理部门正在使用的其他智能应用还包括安装在车辆上的太阳能追踪器,用于追踪高危区域内人员和游客的行踪。图5-9显示了单帧定位结果,精度高于50米,但是比四帧的情况变化更多。
(图5.9 姆科马齐定位试点示意图(单帧))
5
布依格建筑(Objenious/Sagemcom)
建筑物流、车队管理和废品管理等都是物联网潜在的市场。Objenious (布依格电信)和Sagemcom共同开发了布伊格建筑的Ubysol解决方案,当卡车在装卸货点之间运输货物时,提供建筑废物的追踪。
Ubysol解决方案支持“大巴黎”区域总体规划,目的是将巴黎市区(巴黎市区和周边的130个郊区、社区)改造成21世纪的城市。据估计,该项目将产生超过4300万吨的建筑垃圾。每辆卡车配备一个Siconia™多传感器终端设备。终端设备的数据传输由运动传感器触发,并使用陀螺仪来检测装卸货。
为了给LoRaWAN定位做基准测试,一些卡车同时也安装了GPS传感器。GPS和LoRaWAN定位的路径进行了比较,如图5-10,两个路径吻合度较好。
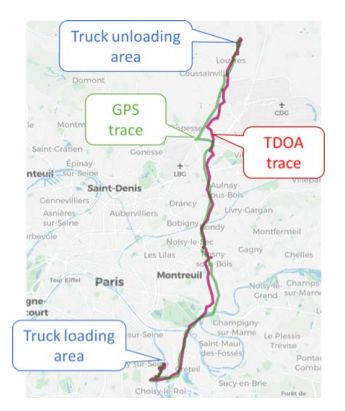
(图5.10 GPS、LoRaWAN TDOA定位路径对比)
统计性能(CDF)经过数月的收集得到,Ubysol解决方案的定位性能结果如图5-11所示。实现了136m的平均定位精度。
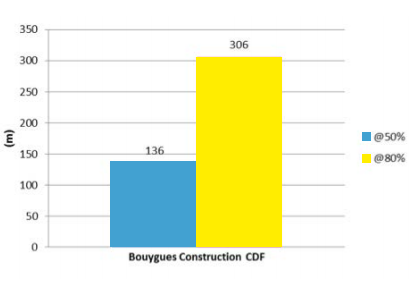
(图5.11 Ubysol的解决方案精度统计)
6
巴黎(Objenious/Sagemcom)
城市环境的资产管理面临着几个挑战:多路径环境、典型的非视距传播。Objenious和Sagemcom在巴黎市中心部署了许多Siconia™定位设备来追踪卡车。当卡车离开指定区域将触发报警。图5-12展示了巴黎市中心的定位终端和网关位置及LoRaWAN定位效果。
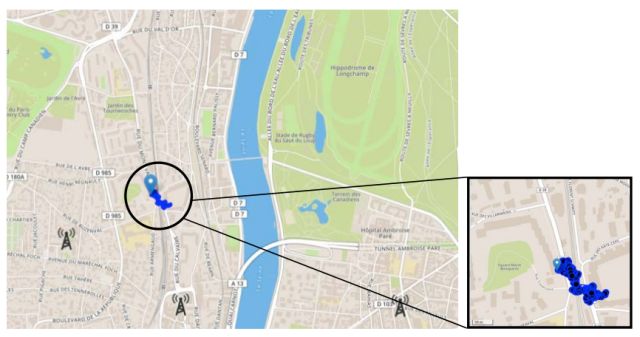
(图5.12 巴黎市中心的卡车定位示意图)
这些定位终端的定位关键性能指标(KPI)如图5-13所示。CDF(第一个图)和定位精度的概率分布函数(第二个图)(平均值:57m, std: 18m),以及定位误差(第三个图)。瞬时站点距离(ISD;第四个图)是网络密度的指示。
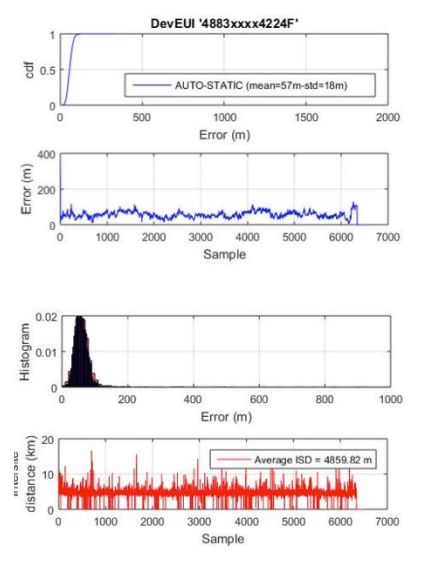
(图5.13 定位性能(CDF, ISD),巴黎市区)
图5-14显示了网络部署在定位精度上的瞬时HDOP影响。在网关部署之前,应该按照第4.3节的说明来评估静态GDOP,并考虑部署区域可用的网关组合。
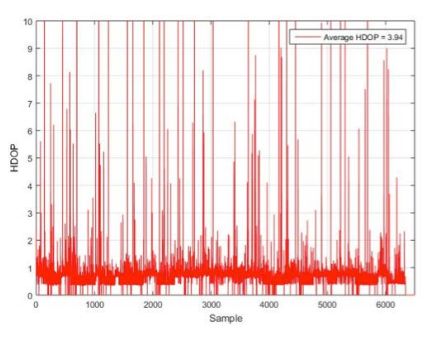
(图5.14 瞬时HDOP影响,巴黎市中心)
图5-15显示了在部署区域中从固定的终端设备(红色)中获得的GDOP。
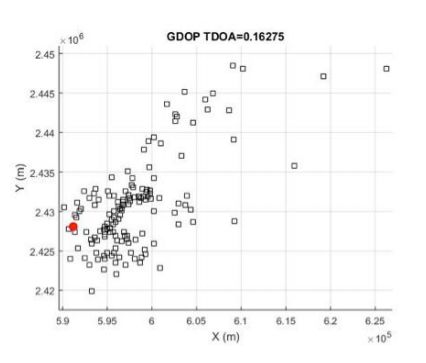
(图5.15 在网关部署情况下一个固定终端(红色)
的GDOP估计)
对于同一个的静止终端设备,图5-16展示了终端设备的无线电测量环境(平均RSS)和终端设备和基站之间的距离的关系。显然,在由密集的网关形成的走廊之外区域,HDOP的值要远远高于与网关走廊对齐的位置。
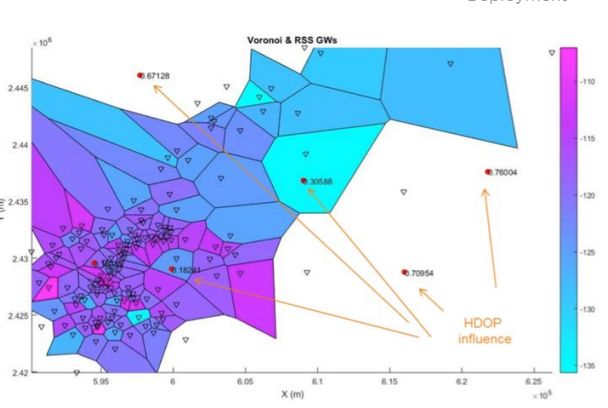
(图5.16 HDOP影响 vs. 终端与基站距离)
7
托里涅富伊拉尔(Kerlink/Semtech)
Kerlink公司在其Wirnet IBTS系列支持基于位置的服务(LBS)中提供定位基站。这些基站可提供精准的时间戳来进行定位(使用Semtech的协议)。一个TDOA定位的求解器已经开发并集成到专有的LBS解决方案中。
Kerlink公司在世界范围内的各种环境和条件(农村、半城市、城市)建立了若干测试平台,以评估和优化定位求解器的性能,特别是计算精度和定位精度。部署在托里涅富伊拉尔的测试平台将会一直工作下去,四个基站安装在城市中、多个定位终端放置在计划好的固定位置。当定位求解器收到一个近实时的消息时它开始计算该位置信息,然后将结果返回到指示板进行显示。
图5.17 (a)托里涅富伊拉尔LoRaWAN定位测试平台
(b)静止终端的估测位置
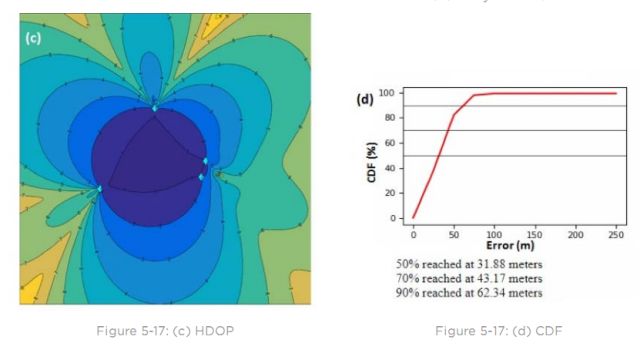
图5.17 (c)HDOP (d)CDF
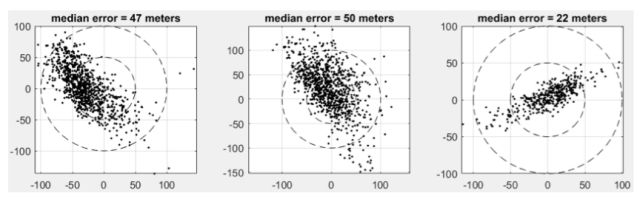
图5-17(a)和(b)显示了已部署的网络和定位终端的估测位置。对HDOP的分析(图5-17(c))使我们能够更清晰的理解定位的精确性。这里要指出的是,定位信息利用卡尔曼滤波器进行了处理。对于一个终端的CDF,如图5-17(d)显示,32米的准确率为50%,43米为70% 和62米是90%。
LoRaWAN定位总结
总结得出如下结论:
• LoRaWAN TDOA 定位能够提供20到200米的定位精度。
• LoRaWAN 定位的一个好处是利用长期使用、电池供电的A类终端设备实现,因此实现了零额外的BOM成本的增加。
• 减少多路径误差和良好的网关部署规划能将定位精度提升到20米。
• LoRaWAN TDOA定位特别适用于如下场景:
•区域围栏。固定资产是否被移动?(建筑工地、公用场地、机场、校园等场所的防盗)
•追踪移动缓慢的资产,不要求频繁的位置更新(人、宠物、牲畜、车辆等),特别适用于智能农业和智慧城市某些案例。
LoRaWAN TDOA定位可能并不适合如下场景:
• 实时、移动的资产跟踪。越高的定位频率正意味着越多的电量消耗,C类终端,等。
•高动态资产定位。
• 高精度定位(亚米级,至少使用现在的基站时钟无法达到)
• LoRaWAN协议用在需要GPS功能传输的用例。
-
gps
+关注
关注
22文章
2882浏览量
166021 -
lorawan
+关注
关注
3文章
313浏览量
23796
原文标题:【干货】《LoRaWAN 定位白皮书》重磅发布!
文章出处:【微信号:GeWu-IOT,微信公众号:物联网资本论】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论