 拒绝开发板, 用 SkyEye 就可以模拟 ARM Linux!
拒绝开发板, 用 SkyEye 就可以模拟 ARM Linux!
对于希望学习 ARM 汇编的同学而言, 购买 ARM 开发板进行板上实测无疑是一个有效的方法,不过购买 ARM 开发板需要一笔费用,而且每次测试都需要连接开发板,比较麻烦。这里介绍一个 ARM 模拟器——SkyEye,通过 SkyEye 我们可以直接在一台 PC 上完成 ARM 汇编程序的开发和调试了,摆脱了 ARM 开发板的限制,真是不错!
下面介绍如何使用:
1、下载 SkyEye 的最新版(https://sourceforge.net/projects/skyeye/),本文用的是 skyeye-1.3.4_rc1.tar.gz,同时为了后面的实验,还要下载 testsuite,它是 skyeye 的测试文件,这里的版本是 skyeye-testsuite-1.3.4,里面有 ArmLinux。
2、安装 SkyEye。
$ tar zxvf skyeye-1.3.4_rc1.tar.gz
$ cd skyeye12
根据 INSTALL 文件里说的步骤:
./configure
make lib
make
sudo make install
sudo make install_lib12345
注意,在 make 时可能会缺各种文件,apt-get install 就可以了,比如我们这里所遇到的两个问题是:python-dev 和 llvm 没有安装。解决方法很简单:
$ sudo apt-get install python-dev
$ sudo apt-get install llvm12
这样 SkyEye 就算安装好了。
3、添加环境变量。
默认 SkyEye 是安装在 /opt/ 下的,因此为了方便,我们在环境变量里把它的路径加入,我们写到 .bashrc 文件中,打开它:
$ vi ~/.bashrc1
输入:
#SkyEye 1.3.4
export PATH=/opt/skyeye/bin:$PATH12
之后注销再登录或执行 source .bashrc 就可以使环境变量生效了。
4、运行 arm_hello 测试程序。
SkyEye 安装好后会在 /opt/skyeye/testsuite 下有一个 arm_hello 的测试程序,按如下方式运行:
$ cd /opt/skyeye/testsuite/arm_hello
$ skyeye -e arm_hello12
注意:skyeye 要运行一个程序时必须要在这个程序的目录里,因为 skyeye 要读取这个程序的 skyeye.conf 配置文件,所以第一步我们要切换到 /opt/skyeye/testsuite/arm_hello 目录下。
这时我们会进入 skyeye 命令模式,输入 start 让 arm_hello 程序开始运行,会弹出一个“connecting to Ubuntu:xxx”的字样的窗口。
5、确保 arm_hello 正常运行。
在 skyeye 命令行输入 run 开始运行,这时窗口会不停的输出“helloworld”,说明 arm_hello 已经成功运行了!
6、arm_hello 的其他命令。
在 skyeye 命令行输入 stop 停止运行;输入 quit 退出skyeye;输入 help 查看帮助。
显然,上面只是安装好了 SkyEye,我们的目的是在 SysEye 中模拟 ARM Linux。那么,下面就来介绍如何在 SkyEye 上启动 Linux,就和在真实的 ARM 开发板上一样。
1、解压 testsuite 测试文件。
$ tar zxvf skyeye-testsuite-1.3.4_rc1.tar.gz1
其中的 linux 目录就是我们要移植到板子上的 amrlinux,依次进入:s3c2410 –>s3c2410x-2.6.36,有三个文件,vmlinux 是 Linux 内核镜像,skyeye.conf 是配置文件,initrd.img 是临时根文件系统。我们在 /opt/skyeye/testsuite 下新建一个目录,然后 copy 过来:
$ sudo mkdir /opt/skyeye/testsuite/armlinux
$ cd linux/s3c2410/s3c2410x-2.6.36
$ sudo copy * /opt/skyeye/testsuite/armlinux123
2、运行 vmlinux 。
$ cd /opt/skyeye/testsuite/armlinux
$ skyeye -e vmlinux12
进入 skyeye 命令模式,输入 start 打开串口窗口。
(我在执行这一步时出错:failed to setup_module (name:net, type:cs8900a),我把 skyeye.conf 里的 net 那一行注释掉了,就行了。)
如果窗口没有打开,则修改 uart:mod=stdio 为 uart:mod=term,然后再试试。
3、启动 Linux 。
在 skyeye 命令行输入 run 启动Linux,屏幕随即会输出串口信息,不过速度很慢!
附几张图:
上面我们简单介绍了如何使用 SkyEye,并且成功运行了既有的 arm_hello 程序,不过这个是针对 arm7 的,现在我们要用 SkyEye 模拟 s3c2410(arm920T)。下面我们开始 SkyEye 的第二部分。
1、首先在 /opt/skyeye/testsuite 下建立 myhello 目录。
$ mkdir /opt/skyeye/testsuite/myhello1
2、添加 myhello.c 文件。
$ cd /opt/skyeye/testsuite/myhello
$ vi myhello.c12
输入如下内容:
#define INTERVAL 100000
void myhello(void)
{
long * addr = (long *)0x50000020;
int timeout = 0;
while(1) {
timeout = 0;
while(++timeout <= INTERVAL);
*addr = 'a';
}
}12345678910111213
地址 0x50000020 就是 UART 的通道 0(UTXH0)的发送缓冲,把数据写入这个地址就会自动发送出去,当然在模拟器中,发送的目标地址就是我们的屏幕啦。
3、准备启动代码。
myhello.c 写好了之后,我们还要准备一段 s3c2410 的启动代码,这段代码在 s3c2410 一上电之后就开始执行,在这段启动代码中,回跳转到我们写的 myhello.c 函数。打开 start.S 文件:
$ vi start.S1
输入如下内容:
.text
.align 4
.global _start
_start:
ldr sp, =1024*4
bl myhello
halt:
b halt12345678910
上面这段很简单,就是声明了一个 _start 标记,这个标记在下面会用到,作为程序的入口地址。汇编和 C 链接的唯一必须的一步就是设置堆栈,这里我们把 sp 指向 4k 顶部,然后跳转到我们的 c 函数myhello 。
4、编写链接脚本。
链接的顺序就是先 start.S 后 myhello.c,打开 myhello.lds 文件:
$ vi myhello.lds1
输入如下内容:
OUTPUT_ARCH(arm)
ENTRY(_start)
SECTIONS
{
. = 0x00000000;
.text :
{
start.o
myhello.o
*(.rodata)
}
. = ALIGN(8192);
.data : {*(.data)}
.bss : {*(.bss)}
}123456789101112131415161718
表示输出 arm 格式,第二句表示入口点是 _start 标记,就是第3步的那个 _start 标记,然后在 0x00000000 处先插入 start.o,然后插入 myhello.o 。
5、编写 Makefile 文件。
$ vi Makefile1
输入如下内容:
CC=arm-linux-gcc
LD=arm-linux-ld
CFLAGS= -c -g -march=armv6 -mtune=arm920t
LDFLAGS= -N -p -X -Thello.lds
myhello: start.o myhello.o
$(LD) $(LDFLAGS) start.o myhello.o -o myhello
arm-linux-objdump -xS myhello > myhello.s
arm-linux-readelf -a myhello > myhello.r
arm-linux-nm myhello > myhello.n
start.o: start.S
$(CC) $(CFLAGS) start.S
myhello.o: myhello.c
$(CC) $(CFLAGS) myhello.c
clean:
rm -rf *.o myhello *.r *.n *.s
arm-linux-objdump -xS myhello > myhello.s
arm-linux-readelf -a myhello > myhello.r
arm-linux-nm myhello > myhello.n123456789101112131415161718192021222324
6、最后我们还需要一个 skyeye 配置文件。
$ vi skyeye.conf1
输入如下内容:
#skyeye config file
arch:arm
cpu: arm920t
mach: s3c2410x
# boot
mem_bank: map=M, type=RW, addr=0x00000000, size=0x04000000, boot=yes
# physical memory
mem_bank: map=M, type=RW, addr=0x30000000, size=0x02000000
# all peripherals I/O mapping area
mem_bank: map=I, type=RW, addr=0x48000000, size=0x20000000
uart:mod=term
#log: logon=0, logfile=./sk1.log, start=0, end=20000012345678910111213141516
7、编译。
$ cd /opt/skyeye/testsuite/myhello
$ make12
8、测试。
$ cd /opt/skyeye/testsuite/myhello
$ skyeye -e myhello12
在 skyeye 命令模式下输入:
start
run12
我们会发现连续输出了字符“a”,完成!
PS:源码中有两处值得商榷的地方:
1) Makefile 第3、4行, 建议为:
CFLAGS= -c -g -march=armv4 -mtune=arm920t
LDFLAGS= -N -p -X -Tmyhello.lds12
2) skyeye.config 第15行, 建议为:
uart:mod=stdio
-
ARM
+关注
关注
134文章
9189浏览量
369947 -
Linux
+关注
关注
87文章
11356浏览量
210785
原文标题:不用买开发板, 使用 SkyEye 模拟 ARM Linux
文章出处:【微信号:gh_c472c2199c88,微信公众号:嵌入式微处理器】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
SkyEye模拟器的音频输出模拟模块设计与实现
移植minicom到ARM开发板
Linux利器:QEMU!用它模拟开发板能替代真开发板? 精选资料分享
EP9315 ARM评估板开发板
ARM SkyEye仿真软件使用说明
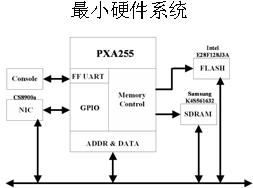
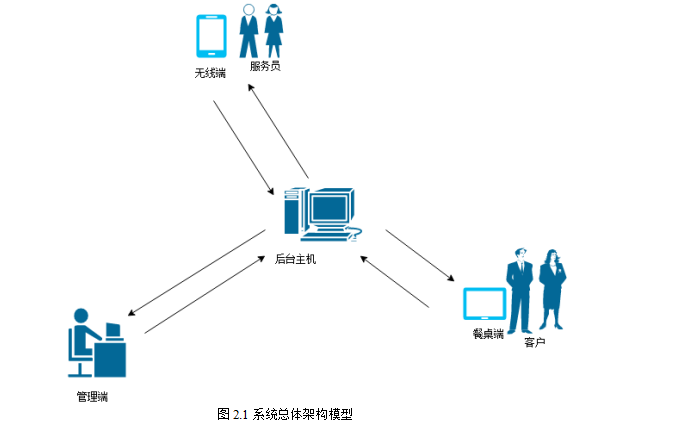
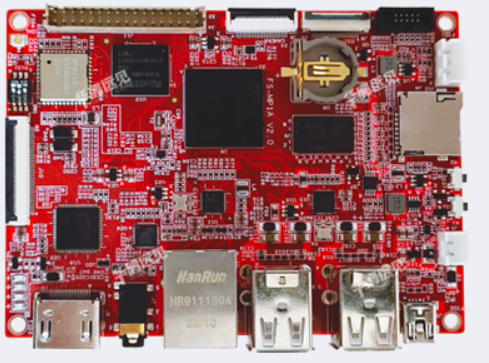
如何使用ARM开发板和Linux嵌入式系统设计一个智能点菜系统
arm开发板能干什么_arm开发板用什么语言
新手学习嵌入式Linux和Android开发板推荐

android开发板那种好,学嵌入式用哪个开发板好?嵌入式开发板推荐
哪些开发板可以运行linux stm32可以吗





 工商网监
工商网监
评论