 有浅入深的介绍BLE与MEMS中的开发板设计
有浅入深的介绍BLE与MEMS中的开发板设计
当BLE遇到MEMS,就如同天使有了翅膀。本期从有浅入深的介绍BLE与MEMS的那些事,就从ST的STEVAL-IDB007V1开发板中BLE_SensorDemo例程开始。
蓝牙入门网上资料很多,可参考《蓝牙BLE权威教程》,或者看看干货 | BLE开发,你要知道这几件事
开发环境搭建请参考论坛帖子STEVAL-IDB007V1之透传演示操作流程和所需软件资源下载(http://bbs.eeworld.com.cn/thread-604229-1-1.html),从开始菜单进入BlueNRG-1 Navigator可以实际运行各种例程查看效果。
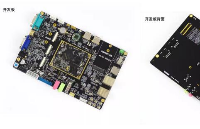
硬件连接:使用ST-Link V2中SWCLK与SWDIO与开发板对应的引脚连接,用来仿真;供电和串口都通过USB线缆。
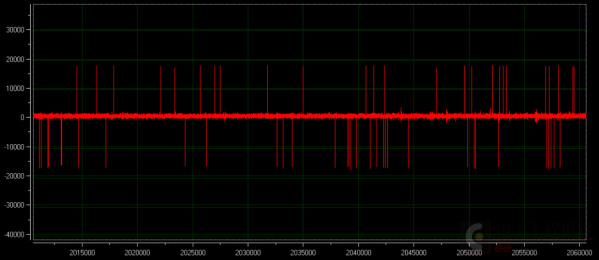
下图是局部放大图:
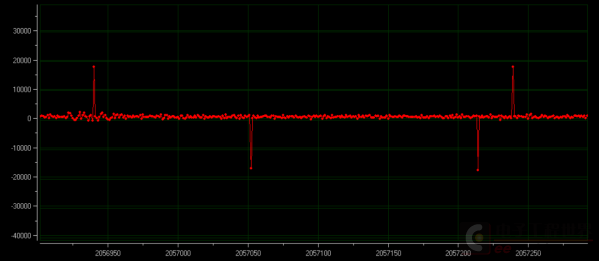
会发现陀螺仪的值会跳变(不同的倾角下跳变的概率不一样,更新频率越高,跳变的概率越大),由于陀螺仪在原始的寄存器值上乘以了70,将跳变值除以70后为+255和-255。
经过一系列的摸索,和ST工程师的帮助,终于解决了问题,见下图,那就是将BDU(Block Data Update)位置1,没有置1的话,数据没有准备好就被读出来也是有可能的,这也就是为何更新频率设置的越高就会越容易出现错误值的原因。
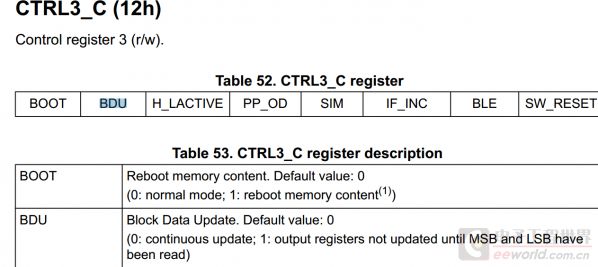
其实早在2015年在数据手册中就建议将BDU位置1了,后来的官方初始化程序中也都将BDU置1了。

下面是不动芯片,仅仅将BDU置1后的效果:
因此想要准确的的获取的数据记得将BDU位置1哦。
更高效的读取数据该传感器使用的是SPI接口,这点很好,相比于IIC,SPI这是要快太多了,我们可以节约更多的时间用来做其他的事,也有利于节能,该芯片最高支持10MHz的SPI速度,但是驱动却写的不是很高效,官方代码如下:
-
static IMU_6AXES_StatusTypeDef LSM6DS3_G_GetAxes( int32_t *pData )
-
{
-
/*Here we have to add the check if the parameters are valid*/
-
int16_t pDataRaw[3];
-
float sensitivity = 0.0f;
-
if(LSM6DS3_G_GetAxesRaw(pDataRaw) != IMU_6AXES_OK)
-
{
-
return IMU_6AXES_ERROR;
-
}
-
if(LSM6DS3_G_GetSensitivity( &sensitivity ) != IMU_6AXES_OK)
-
{
-
return IMU_6AXES_ERROR;
-
}
-
pData[0] = (int32_t)(pDataRaw[0] * sensitivity);
-
pData[1] = (int32_t)(pDataRaw[1] * sensitivity);
-
pData[2] = (int32_t)(pDataRaw[2] * sensitivity);
-
return IMU_6AXES_OK;
-
static IMU_6AXES_StatusTypeDef LSM6DS3_G_GetAxesRaw( int16_t *pData )
-
{
-
/*Here we have to add the check if the parameters are valid*/
-
uint8_t tempReg[2] = {0, 0};
-
if(LSM6DS3_IO_Read(&tempReg[0], LSM6DS3_XG_MEMS_ADDRESS, LSM6DS3_XG_OUT_X_L_G, 2) != IMU_6AXES_OK)
-
{
-
return IMU_6AXES_ERROR;
-
}
-
pData[0] = ((((int16_t)tempReg[1]) << 8) + (int16_t)tempReg[0]);
-
if(LSM6DS3_IO_Read(&tempReg[0], LSM6DS3_XG_MEMS_ADDRESS, LSM6DS3_XG_OUT_Y_L_G, 2) != IMU_6AXES_OK)
-
{
-
return IMU_6AXES_ERROR;
-
}
-
pData[1] = ((((int16_t)tempReg[1]) << 8) + (int16_t)tempReg[0]);
-
if(LSM6DS3_IO_Read(&tempReg[0], LSM6DS3_XG_MEMS_ADDRESS, LSM6DS3_XG_OUT_Z_L_G, 2) != IMU_6AXES_OK)
-
{
-
return IMU_6AXES_ERROR;
-
}
-
pData[2] = ((((int16_t)tempReg[1]) << 8) + (int16_t)tempReg[0]);
-
return IMU_6AXES_OK;
-
}
每次都是单次读取(读两个字节)每一轴的数据,而且还获取了一次sensitivity(读一个字节)。
我们知道SPI要完成一次读数据的操作,本质是需要读写两次的,第一次将地址写进去,然后再将0写入,将数据弄出来。因此驱动如果需要读取6轴的数据一共需要写12次,读18次SPI。而我认为sensitivity是开始设置的,可以不读,然后6轴的数据可以一次全部读出来,因为默认SPI地址是会累加的,
因此程序可以改成如下,然后将陀螺仪值乘以70,加速度计值乘以0.122
-
void Get_Sensor_RawData(void){
-
Sensor_IO_Read(NULL,LSM6DSL_ACC_GYRO_OUTX_L_G,regValue, 12);
-
for(int i=0;i<6;i++){
-
Sensor_Raw_Data[/size][/font][font=微软雅黑][size=3] = ( ( ( ( int16_t )m_rx_buf[2*i+2] ) << 8 ) + (int16_t )m_rx_buf[2*i+1] );
-
}
-
}
从0x22地址开读,也就是写1次,读12次,而且还节约了SPI的开启和关闭的耗时,这样就大大的提高的数据获取的速度,如果可以使用DMA能够更高效。
因此如果想要更加高效的使用陀螺仪加速度计,记得要连续的读取12个字节且无需读取灵敏度哦。
-
mems
+关注
关注
129文章
3975浏览量
191330 -
陀螺仪
+关注
关注
44文章
795浏览量
99077 -
ST
+关注
关注
32文章
1146浏览量
129322
原文标题:干货 | 当BLE遇到MEMS——收服和调教
文章出处:【微信号:wwzhifudianhua,微信公众号:MEMS技术】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
瑞芯微主板/开发板Linux系统播放音频方法,触觉智能RK3562开发板演示
正点原子fpga开发板不同型号
【干货】有了这份HK32F407ZGT7开发板介绍,1万个项目轻松拿捏!

【BearPi-Pico H3863星闪开发板体验连载】蓝牙 BLE 透传测试
瑞萨开发板RX-FSOE-REF-KIT功能安全使用介绍(上)

多个esp32开发板如何组成ble mesh网络,是否可以自动组网呢?
使用esp-idf-v5.0.1 example中的esp_ble_mesh例程遇到的疑问求解
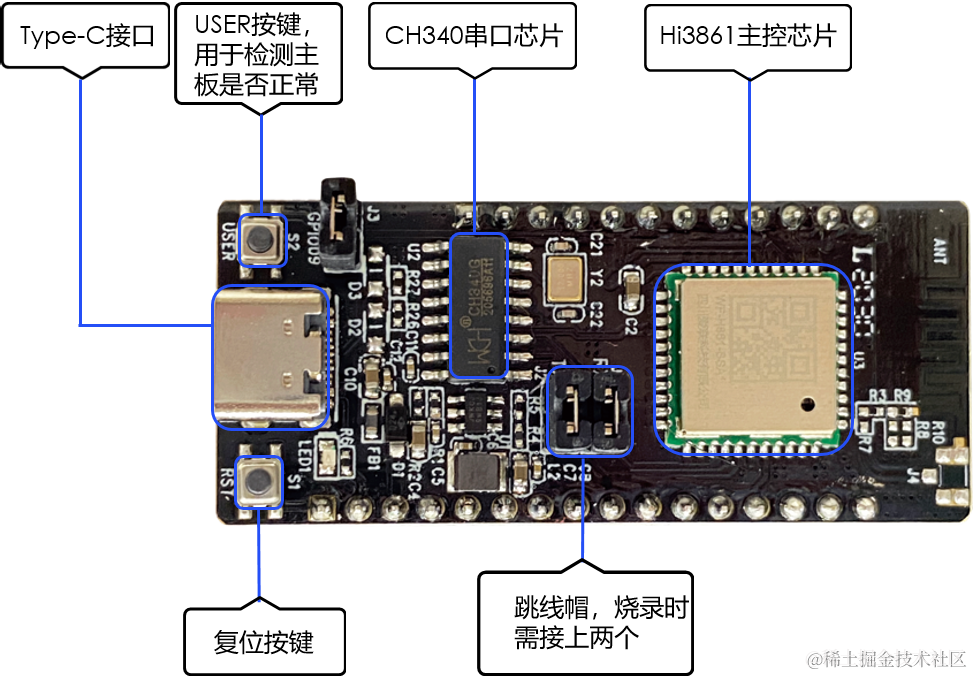
鸿蒙OpenHarmony南向:【Hi3861开发板介绍】
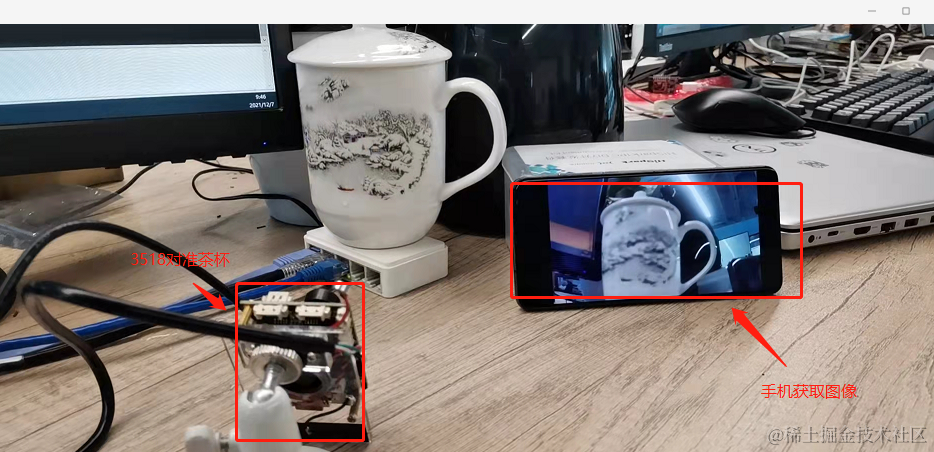
OpenHarmony鸿蒙南向开发案例:【智能猫眼(基于Hi3518开发板)】





 工商网监
工商网监
评论