 交流伺服电机工作原理,交直流伺服电机的区别
交流伺服电机工作原理,交直流伺服电机的区别

伺服电机(servo motor )是指在伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装置。
伺服电机的作用是将输入的电压信号(即控制电压)转换成轴上的角位移或角速度输出,在自动控制系统中常作为执行元件,所以伺服电动机又称为执行电动机,其最大特点是:有控制电压时转子立即旋转,无控制电压时转子立即停转。转轴转向和转速是由控制电压的方向和大小决定的。伺服电动机分为交流和直流两大类。
一、交流伺服电机
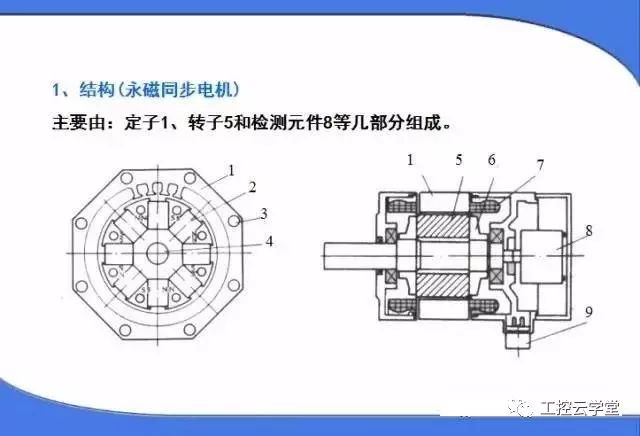
1.基本结构
交流伺服电机主要由定子和转子构成。
定子铁心通常用硅钢片叠压而成。定子铁心表面的槽内嵌有两相绕组,其中一相绕组是励磁绕组,另一相绕组是控制绕组,两相绕组在空间位置上互差90°电角度。工作时励磁绕组f与交流励磁电源相连,控制绕组k加控制信号电
2.工作原理
交流伺服电机在没有控制电压时,气隙中只有励磁绕组产生的脉动磁场,转子上没有启动转矩而静止不动。当有控制电压且控制绕组电流和励磁绕组电流不同相时,则在气隙中产生一个旋转磁场并产生电磁转矩,使转子沿旋转磁场的方向旋转。但是对伺服电动机要求不仅是在控制电压作用下就能启动,且电压消失后电动机应能立即停转。如果伺服电动机控制电压消失后像一般单相异步电动机那样继续转动,则出现失控现象,我们把这种因失控而自行旋转的现象称为自转。
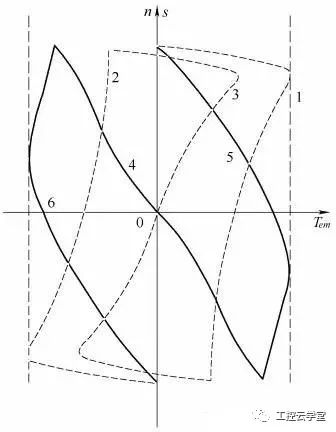
为消除交流伺服电机的自转现象,必须加大转子电阻r2,这是因为当控制电压消失后,伺服电机处于单相运行状态,若转子电阻很大,使临界转差率sm>1,这时正负序旋转磁场与转子作用所产生的两个转矩特性曲线以及合成转矩特性曲线如图所示。由图中可看出,合成转矩的方向与电机旋转方向相反,是一个制动转矩,这就保证了当控制电压消失后转子仍转动时,电动机将被迅速制动而停下。转子电阻加大后,不仅可以消除自转,还具有扩大调速范围、改善调节特性、提高反应速度等优点。
3.控制方法
可采用下列三种方法来控制伺服电机的转速高低及旋转方向。
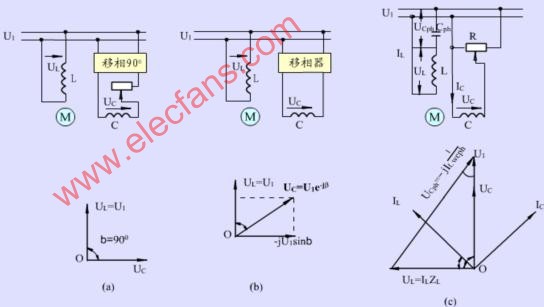
(1)幅值控制 保持控制电压与励磁电压间的相位差不变,仅改变控制电压的幅值。
(2)相位控制 保持控制电压的幅值不变,仅改变控制电压与励磁电压间的相位差。
(3)幅-相控制 同时改变控制电压的幅值和相位。
二、直流伺服电动机
1.基本结构
传统的直流伺服电机动实质是容量较小的普通直流电机,有他励式和永磁式两种,其结构与普通直流电动机的结构基本相同。
杯形电枢直流伺服电机的转子由非磁性材料制成空心杯形圆筒,转子较轻而使转动惯量小,响应快速。转子在由软磁材料制成的内、外定子之间旋转,气隙较大。
无刷直流伺服电机用电子换向装置代替了传统的电刷和换向器,使之工作更可靠。它的定子铁心结构与普通直流电动机基本相同,其上嵌有多相绕组,转子用永磁材料制成。
2.基本工作原理
传统直流伺服电机的基本工作原理与普通直流电动机完全相同,依靠电枢电流与气隙磁通的作用产生电磁转矩,使伺服电动机转动。通常采用电枢控制方式,即在保持励磁电压不变的条件下,通过改变电枢电压来调节转速。电枢电压越小,则转速越低;电枢电压为零时,电动机停转。由于电枢电压为零时电枢电流也为零,电动机不产生电磁转矩,不会出现“自转”。
三、交直流伺服电机的区别
直流伺服电机的缺点:
电刷和换向器易磨损,换向时产生火花,限制转速
结构复杂,制造困难,成本高
交流伺服电机的优点:
结构简单,成本低廉,转子惯量较直流电机小
交流电动机的容量大于直流电机
伺服系统的性能要求
一、基本要求
1、位移精度高
位移精度:指指令脉冲要求机床工作台的位移量和该指令脉
冲经伺服系统转化为工作台的实际位移量之间的
符合程度
2、稳定性好
稳定性:指伺服系统在给定输入或外界干扰作用下,能在短暂
的调节过程后,达到新的或者恢复到原来的平衡状态
3、定位精度高
定位精度:是指输出量能复现输入量的精确程度
4、快速响应性好
5、调速范围宽
调速范围:是指机械装置要求电动机能提供的最高转速
和最低转速的比值
6、系统可靠性好
7、低速大转矩
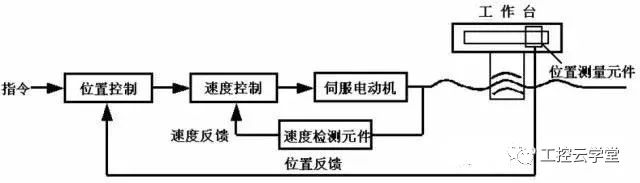
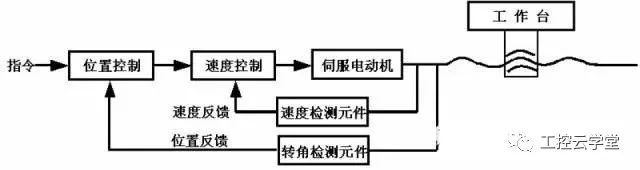
二、伺服系统的分类
1、按伺服系统调节理论分类
开环伺服系统

闭环伺服系统
半闭环伺服系统
-
伺服电机
+关注
关注
88文章
2202浏览量
61583 -
励磁
+关注
关注
1文章
110浏览量
17487 -
直流伺服电机
+关注
关注
4文章
56浏览量
11127
原文标题:伺服电机全知道
文章出处:【微信号:GKYXT1508,微信公众号:工控云学堂】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录



评论