 神经元和神经网络层的标准C++定义
神经元和神经网络层的标准C++定义
前一段时间做了一个数字识别的小系统,基于BP神经网络算法的,用MFC做的交互。在实现过程中也试着去找一些源码,总体上来讲,这些源码的可移植性都不好,多数将交互部分和核心算法代码杂糅在一起,这样不仅代码阅读困难,而且重要的是核心算法不具备可移植性。设计模式,设计模式的重要性啊!于是自己将BP神经网络的核心算法用标准C++实现,这样可移植性就有保证的,然后在核心算法上实现基于不同GUI库的交互(MFC,QT)是能很快的搭建好系统的。下面边介绍BP算法的原理(请看《数字图像处理与机器视觉》非常适合做工程的伙伴),边给出代码的实现,最后给出基于核心算法构建交互的例子。
人工神经网络的理论基础
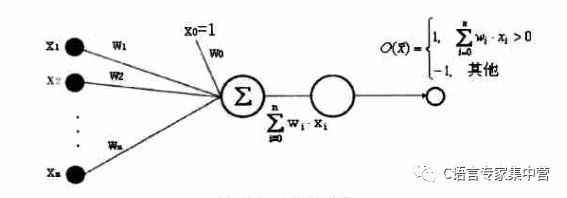
1.感知器
感知器是一种具有简单的两种输出的人工神经元,如下图所示。
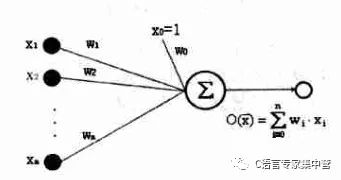
2.线性单元
只有1和-1两种输出的感知器实际上限制了其处理和分类的能力,下图是一种简单的推广,即不带阈值的感知器。
3.误差准则
使用的是一个常用的误差度量标准,平方误差准则。公式如下。
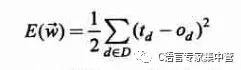
其中D为训练样本,td为训练观测值d的训练输出,ot为观测值d的实际观测值。如果是个凸函数就好了(搞数学的,一听到凸函数就很高兴,呵呵!),但还是可以用梯度下降的方法求其参数w。
4.梯度下降推导
在高等数学中梯度的概念实际上就是一个方向向量,也就是方向导数最大的方向,也就是说沿着这个方向,函数值的变化速度最快。我们这里是做梯度下降,那么就是沿着梯度的负方向更新参数w的值来快速达到E函数值的最小了。这样梯度下降算法的步骤基本如下:
1)初始化参数w(随机,或其它方法)。
2)求梯度。
3)沿梯度方向更新参数w,可以添加一个学习率,也就是按多大的步子下降。
4)重复1),2),3)直到达到设置的条件(迭代次数,或者E的减小量小于某个阈值)。
梯度的表达式如下:
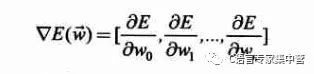
那么如何求梯度呢?就是复合函数求导的过程,如下:
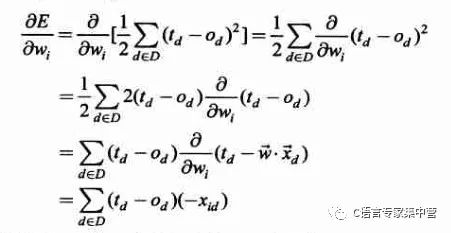
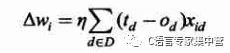
其中xid为样本中第d个观测值对应的一个输入分量xi。这样,训练过程中参数w的更新表达式如下(其中添加了一个学习率,也就是下降的步长):
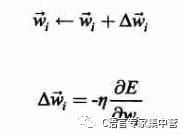
于是参数wi的更新增量为:
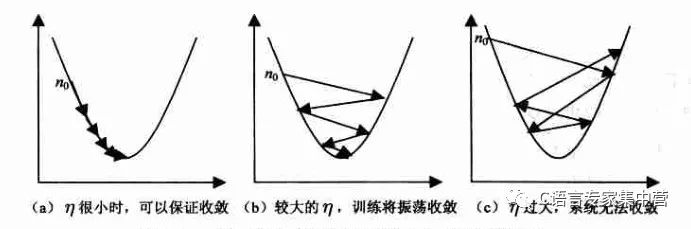
对于学习率选择的问题,一般较小是能够保证收敛的,看下图吧。
5.增量梯度下降
对于4中的梯度下降算法,其缺点是有时收敛速度慢,如果在误差曲面上存在多个局部极小值,算法不能保证能够找到全局极小值。为了改善这些缺点,提出了增量梯度下降算法。增量梯度下降,与4中的梯度下降的不同之处在于,4中对参数w的更新是根据整个样本中的观测值的误差来计算的,而增量梯度下降算法是根据样本中单个观测值的误差来计算w的更新。
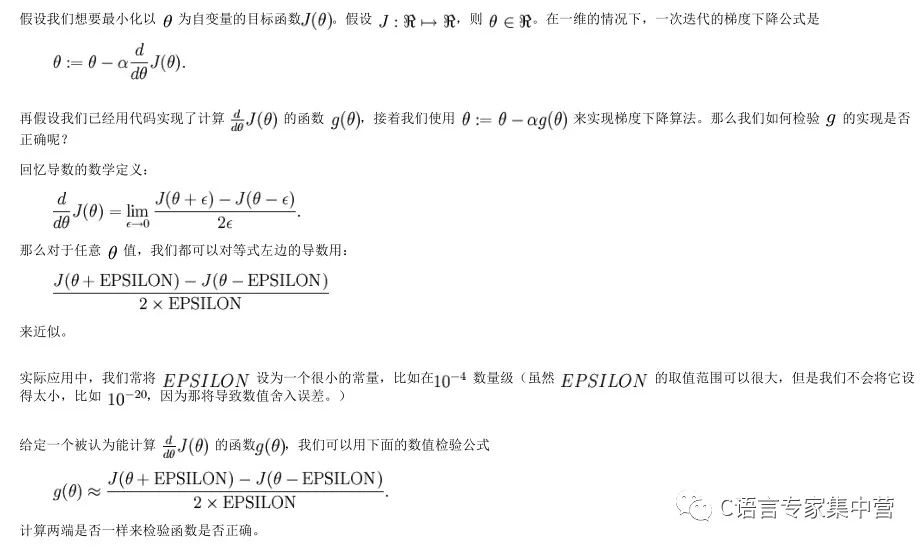
6.梯度检验
这是一个比较实用的内容,如何确定自己的代码就一定没有错呢?因为在求梯度的时候是很容易犯错误的,我就犯过了,嗨,调了两天才找出来,一个数组下表写错了,要是早一点看看斯坦福大学的深度学习基础教程就好了,这里只是截图一部分,有时间去仔细看看吧。
多层神经网络
好了有了前面的基础,我们现在就可以进行实战了,构造多层神经网络。
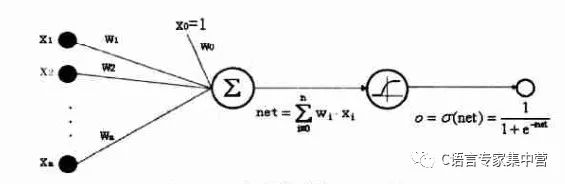
1.Sigmoid神经元
Sigmoid神经元可由下图表示:
2.神经网络层
一个三层的BP神经网络可由下图表示:
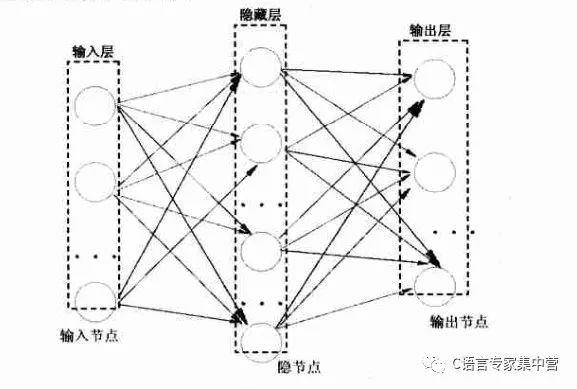
3.神经元和神经网络层的标准C++定义
由2中的三层BP神经网络的示意图中可以看出,隐藏层和输出层是具有类似的结构的。神经元和神经网络层的定义如下:
| 1 |
-
神经网络
+关注
关注
42文章
4772浏览量
100835
原文标题:BP神经网络原理及C++实战
文章出处:【微信号:C_Expert,微信公众号:C语言专家集中营】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论