 如何确保总体系统误差的正确计算
如何确保总体系统误差的正确计算
计算系统的总误差是一件需要些技巧的工作,特别是在技术规格的单位变化很大时更是如此。当计算总体误差时,在合并前,所有技术规格必须被转换为一个共同的单位。这篇博文将告诉你如何在伏特、百分率和百万分率 (ppm) 之间进行转换,以确保总体系统误差的正确计算。
线性器件数据表中的大多数误差是折算到输入端的 (RTI)。将误差折算到输入端有三个主要的好处:他将输出上总体误差的每一个误差源分离开来,不需要知道器件增益,并且简化了将总体误差折算到输出端的计算方法。为了在伏特、百分率和百万分率间转换输入引入的技术规格,并且将总体误差折算到输出端,我们使用以下方程式。
从伏特转换为百分率:

在这里,
Error(V) = 单位为伏特的误差。
Error(%) = 以满量程范围百分比表示的误差。
FSRInput = 输入的满量程范围。
要将百分率转换为百万分率:

在这里,
Error(ppm) = 以满量程范围的百万分率表示的误差。
要将所有误差折算到输出端,单位伏特:

在这里:
总输出误差 (V) = 以伏特为单位折算到输出端的总体误差。
FSROuput = 输出的满量程范围。
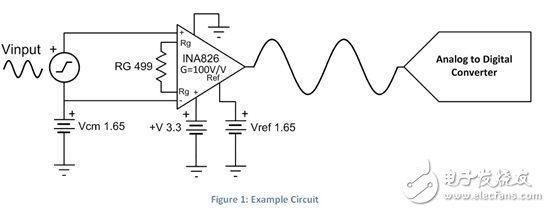
为了显示一个如何使用上述方程式的示例,我们将使用图1中的电路,并且计算由INA826的几个技术规格所导致的组合误差(单位ppm)。此电路使用一个20mVpp的输入信号,并且RG针对INA826被设定为具有100V/V的增益。
我们将看到的第一个误差是输入偏移电压。图2显示针对INA826的输入偏移电压技术规格。
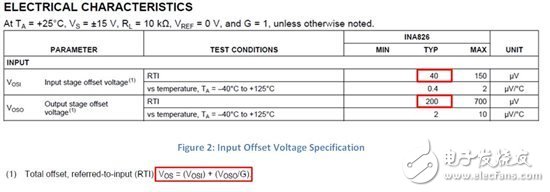
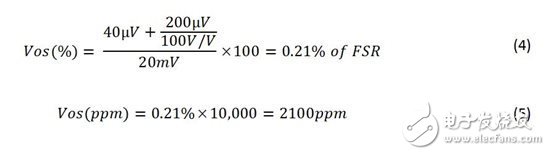
由于这个技术规格的单位为伏特,使用方程式1和方程式2来将其转换为ppm值。我们需要知道输入的满量程范围来解出方程式1。图1的FSR是INA826输入上的总电压范围。在这个情况下为20mVpp。我们现在掌握了所需的全部信息,我们将数字代入方程式。
现在来看一看增益误差。图3显示针对INA826的增益误差技术规格。
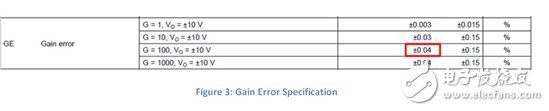
这个增益误差技术规格给出的单位为百分比。因此,我们只需使用方程式2来将其转换为ppm。

现在两个误差源的单位均为ppm了,我们可以通过计算方程式7中显示的RSS,或和方根值来将他们组合在一起。

这是由输入引入的增益误差和偏移电压所导致的总体误差。然而,很多人想看看他们在输出上能够会测量到多少误差。为了将误差折算到输出端,使用方程式3。方程式3使用变量FSROutput,输出的满量程范围。在图1显示的示例中,输出的FSR为2Vpp。计算方法为输入信号 (20mVpp) 乘以增益 (100V/V)。方程式8中计算的是输出上的总体电压误差。

虽然这些误差不是INA826的所有误差,可以用相似的分析来将其余误差包括在内。
你现在知道了如何在伏特、百分率和百万分率之间进行转换,你已经可以计算系统的总体误差了。如果你还想看看其他计算总体系统误差的示例,请查看TI设计TIPD156内的附录B。
-
线性器件
+关注
关注
0文章
5浏览量
7982 -
增益误差
+关注
关注
0文章
10浏览量
5144
发布评论请先 登录
相关推荐
LDC1000的数据手册上提到了相对测量距离与RMS噪声的关系曲线,这个RMS噪声是一个系统误差还是随机误差?
用ADS1015/ADS1115通过非平衡桥测NTC,有什么方法把测量误差降低?
仿真分析误差来源及减少建模误差的方法

遥感监测的精度与误差分析 遥感影像分类的方法与技巧
示波器测量误差的原因 示波器波形分析技巧
输入失调电流造成的误差是怎么计算得到的?
基于CW32的仪表精度测量实现(三):标定与校准
如何正确计算并使用晶振的外接负载电容
稳态误差反映了系统的什么性能
如何降低输入引起的稳态误差
减小系统稳态误差的方法有哪些?
芯盾时代深度参编的行业标准《总体架构》即将施行

振弦采集仪在岩土工程监测中的误差分析与校正方法






 工商网监
工商网监
评论