 FANUC机器人设定后台逻辑的步骤
FANUC机器人设定后台逻辑的步骤
用户在使用FANUC机器人进行编程示教时,有时会希望主程序运行的同时,能够同时运行其它的程序,这种“其它的程序”称为后台逻辑。
使用后台逻辑时,可以在后台执行只包含对应后台逻辑指令的TP程序。程序从最初到最后被反复执行,该执行不受急停、暂停、报警的影响。
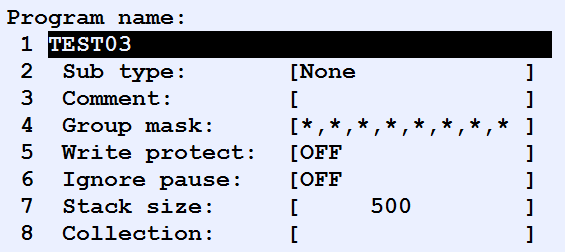
设定后台逻辑的步骤非常简单:1.按下MENU键2.选择SETUP3.选择BG LOGIC,进入如下画面

这里分三块内容进行简要说明:(1)后台逻辑的程序类别为TP程序,不可以包含运动组,即程序属性必须是这样的:
TP程序中可使用的指令、数据及运算符有:
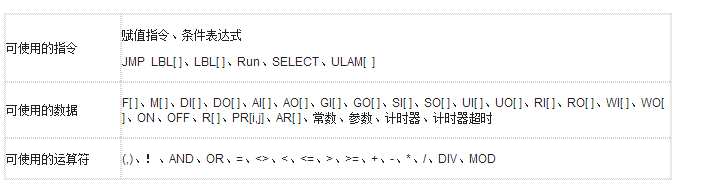
(3)模式,有两种执行模式:标准模式和优先模式。在两种模式下都可以在后台执行所有复合运算指令。(2)后台逻辑状态,主要有三种:停止:程序已停止运行中:在标准模式下运行程序运行(快速):在优先模式下运行程序按下F2运行后台逻辑,包含不能使用字符时,发生错误;按下F3则可以停止程序的后台运行。
使用后台逻辑时,需注意最多可以同时执行8个程序作为后台逻辑。在后台执行程序时,不能编辑该程序,不能作为通常的任务来执行。尚未在后台执行程序时,可以将该程序作为通常的任务来执行。在后台执行程序时,不能通过覆盖相同名称的程序来加载。
最后总结一下,后台逻辑指令可以在后台执行特定的TP程序。执行的程序可对前台运行的程序起辅助作用,且不会影响前台主程序的运行,希望此项功能对FANUC用户有所帮助。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
210文章
28053浏览量
205731 -
Fanuc
+关注
关注
18文章
116浏览量
36564
原文标题:FANUC机器人后台逻辑指令设定
文章出处:【微信号:GKYXT1508,微信公众号:工控云学堂】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
《机器人设计与实现》——低成本DIY机器人,一本机器人制作的经典入门书
`内容简介《机器人设计与实现》是机器人制作的入门书。《机器人设计与实现》的作者根据多年来教学科研的实践和体会,运用简明易懂的语言全面地讲述机器人的制作技术。全书共分7篇40章,内容包括
发表于 08-01 18:21
机器人制作资料宝典【日本顶尖机器人设计师经典教材】
`尽管有很多同学想参加机器人设计大赛,但是他们却不知道该如何入手。例如,很多同学不知道应该怎样设计机器人,需要采用哪些零部件和原材料,这些材料和零件应该怎样使用,应该怎样加工零部件等等。要制作机器人
发表于 01-10 15:49
智能机器人设计资料大全
` 本帖最后由 小巧的鱼 于 2015-4-23 00:10 编辑
智能机器人设计资料大全相关的原理图源程序请点击下载:[hide][/hide] `
发表于 06-04 15:21
刚柔软机器人设计与仿真分析实例解析
一、机器人设计理论二、机器人仿真分析基础机械臂Matlab建模仿真分析基于Matlab 与ADAMS联合的机器人系统仿真分析三、软体关节设计软体机器人关节定量设计常见软体
发表于 09-02 11:17
FANUC机器人宏程序自动运行的方法及启动宏程序的步骤教程
FANUC机器人宏程序自动运行的方法及启动宏程序的步骤教程,具体的跟随小编一起来了解一下。

机器人轴动作范围的设定步骤
在机器人中都会有一个硬限位和软限位,对机器人的安全进行保护,那么我们要解决图1中的问题,就可以使用机器人中的软限位来防止这种情况的发生,在FANUC
机器人设计教程之基于“创意之星”的机器人设计资料说明
本文档的主要内容详细介绍的是机器人设计教程之基于“创意之星”的机器人设计资料说明主要内容包括了:一、机器人构型设计和运动规划实验
发表于 12-25 11:40
•11次下载





 工商网监
工商网监
评论