 机器人手臂5种不同的运动组合
机器人手臂5种不同的运动组合

一般机器人手臂有3个自由度,即手臂的伸缩、左右回转和升降 (或俯仰)运动。手臂回转和升降运动是通过机座的立柱实现的,立柱的横向移动即为手臂的横移。
手臂的各种运动通常由驱动机构和各种传动机构来实现。手臂的 3 个自由度,可以有不同的运动 (自由度)组合,通常可以将其设计成如图 2-34 五种形式。
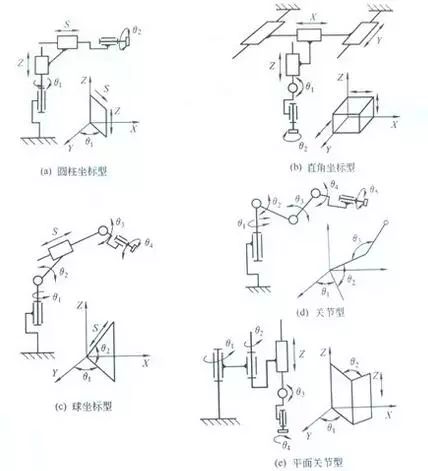
① 圆柱坐标型
如图 2-34(a)所示,这种运动形式是通过一个转动,两个移动,共三个自由度组成的运动系统,工作空间图形为圆柱形。它与直角坐标型比较,在相同的工作空间条件下,机体所占体积小,而运动范围大。
② 直角坐标型
如图 2-34(b)所示,直角坐标型机器人,其运动部分由三个相互垂直的直线移动组成,其工作空间图形为长方体。它在各个轴向的移动距离,可在各坐标轴上直接读出,直观性强,易于位置和姿态的编程计算,定位精度高、结构简单,但机体所占空间体积大、灵活性较差。
③球坐标型
如图 2-34(c)所示,又称极坐标型,它由两个转动和一个直线移动所组成,即一个回转,一个俯仰和一个伸缩运动组成,其工作空间图形为一球体,它可以作上下俯仰动作并能够抓取地面上或较低位置的工件,具有结构紧凑、工作空间范围大的特点,但结构轻复杂。
④关节型
如图 2-34(d)所示,关节型又称回转坐标型,这种机器人的手臂与人体上肢类似,其前三个关节都是回转关节,这种机器人一般由立柱和大小臂组成,立柱与六臂同形成肩关节,大臂与小臂间形成肘关节,可使大臂作回转运动θ1和使大管作俯仰摆动θ2,小臂作俯仰摆动θ3。其特点是工作空间范围大,动作灵活,通用性强,能抓取靠近机座的物体。
⑤平面关节型
如图 2-34(e)所示,采用两个回转关节和一个移动关节;两个回转关节控制前后、左右运动,而移动关节则实现上下运动,具工作空间的轨迹图形,它的纵截面为矩形的回转体,纵截面高为移动关节的行程长,两回转关节转角的大小决定回转体横截面的大小、形状、这种形式又称为SCARA型装配机器人。 结合P29-30的图选讲其中一个工作原理。
机器人手臂的典型机构
(1)手臂直线和回转运动机构
机器人手臂的伸缩、横向移动均属于直线运动。实现手臂往复直线运动的机构形式比较多,常用的有活塞油(汽)缸、齿轮齿条机构、丝杠螺母机构以及连杆机构等。因为活塞油(汽)缸的体积小、重量轻,在机器人的手臂结构中得到的应用比较多。
(2)手臂俯仰运动机构
机器人手臂的俯仰运动一般采取活塞油(汽)缸与连杆机构联用来实现。手臂的俯仰运动用的活塞缸位于手臂的下方,其活塞杆和手臂用铰链连接,缸体采用尾部耳环或中部销轴等方式与立柱连接。
-
机器人
+关注
关注
214文章
31611浏览量
224321 -
自由度
+关注
关注
0文章
8浏览量
10581 -
机器人手臂
+关注
关注
1文章
8浏览量
2706
原文标题:干货 | 机器人手臂的典型机构
文章出处:【微信号:industrial_robot,微信公众号:国联视讯工业机器人信息服务】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
人形机器人手部模块硬件解析与静电浪涌防护方案

为什么说关节扭矩传感器是高端机器人的“触觉神经”?
为何你的机器人手臂“知觉”存在偏差?探秘力传感器的奥秘
注意!注意!Profinet转devicenet与Fanuc机器手臂连接易忽略的小细节

人形机器人爆发背后,一个被忽视的核心技术:机器人运动学控制

TCXO晶振:YXC扬兴科技 | 助力机器人运动控制提升方案

【案例分享】电子谷定制通讯线束:人形机器人稳定律动连接方案

高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
用于机器人手臂的基于B3M010C075Z和BTD5452R的三相全桥电机驱动器设计报告
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
生产线不停摆的“隐形卫士”:优比施UPS电源,精准守护机器人手臂零停机




评论