 AGV不同的导航方式有何特点,谁会成为未来主流?
AGV不同的导航方式有何特点,谁会成为未来主流?
AGV在智能工厂、智能仓储上得到了广泛应用,技术上获得了迅猛发展,衍生出了多种导航方式,不同的导航方式有何特点?谁会成为未来主流的导航方式呢?
一、AGV简介
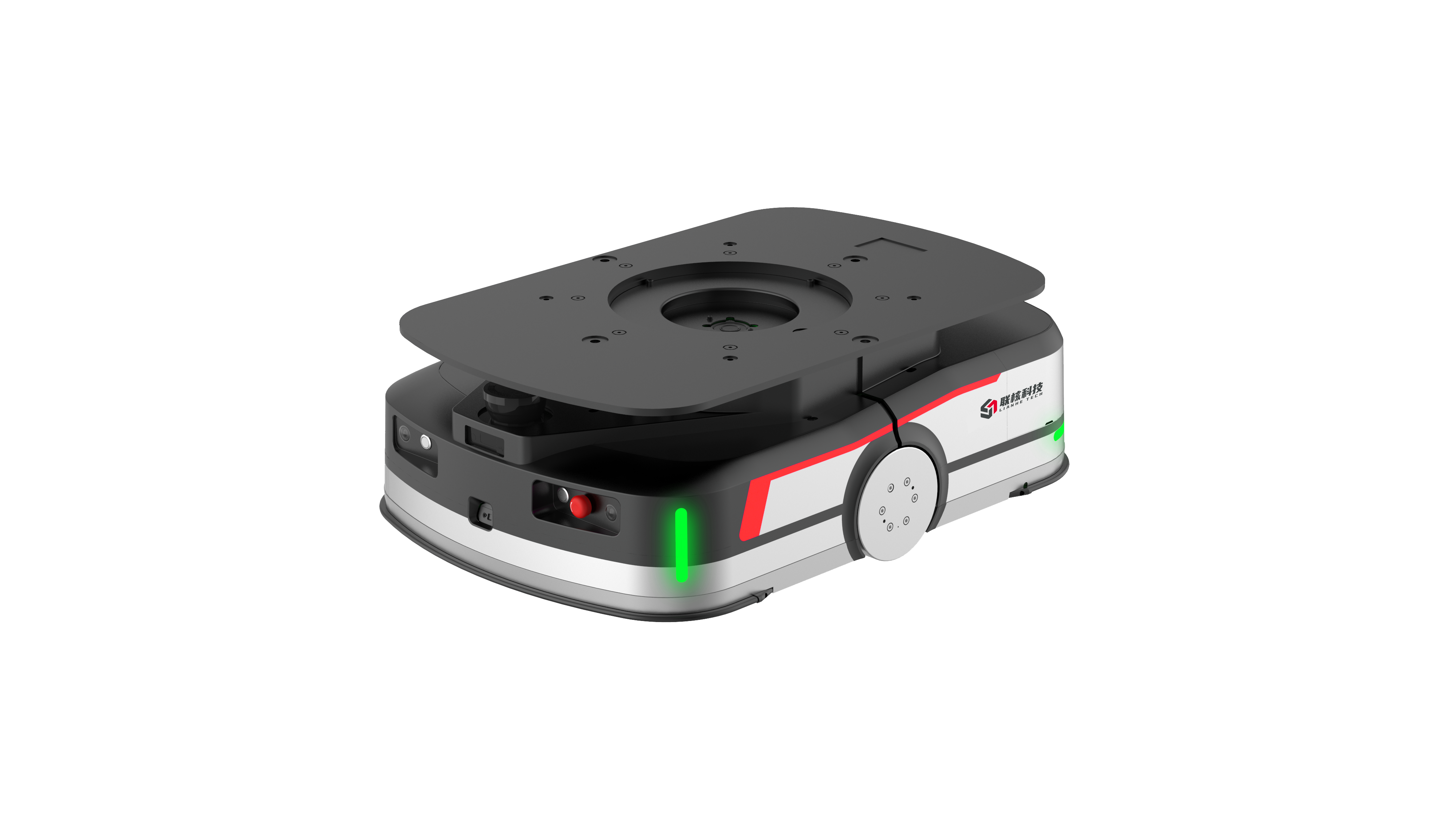
AGV即自动导向小车(Automated Guided Vehicle),因具有良好的柔性和较高的可靠性,能够减少工厂对劳动力的需求,提高产品设备在运输中的安全性且安装容易,维护方便,已经广泛的应用于自动化仓储系统、智能工厂、智能生产等领域。
图1 AGV工作场景
在应用环境中,往往由多台AGV组成自动导向小车系统,该系统通过WIFI或其他传输链路,控制AGV动作。主要控制功能包括:地图管理、路径导航、路径规划、AGV导航控制、任务分配等 。
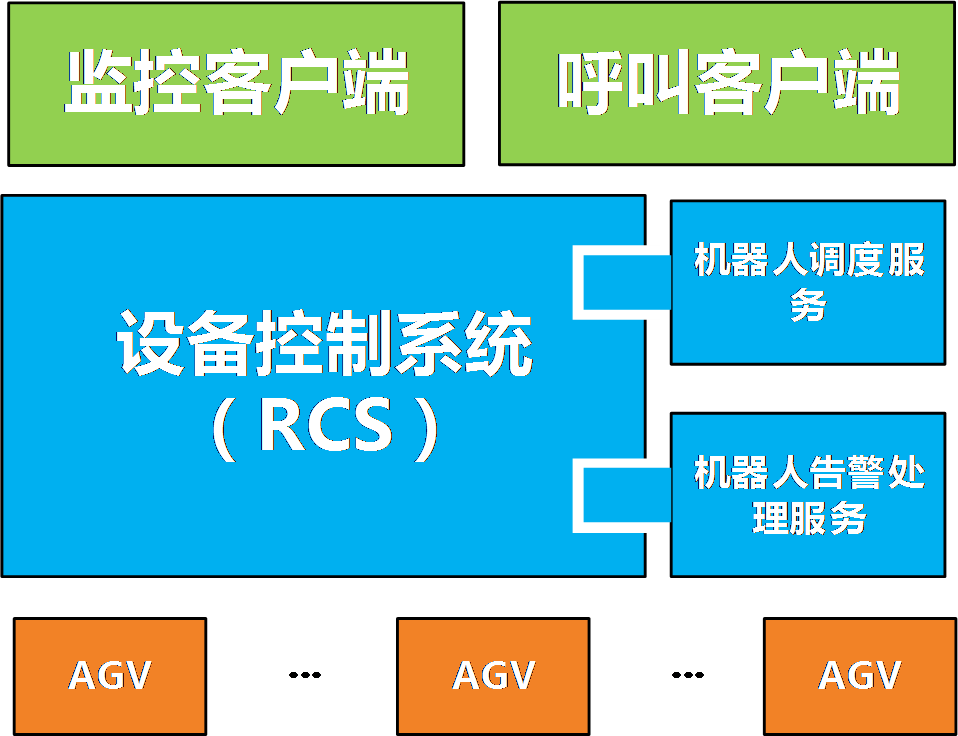
图2 AGV控制系统软件结构
二、AGV导航方式
所谓AGV导航方式是指决定其运行方向和路径的方式,它不同于前面所说的一般通信。常用的导航方式分两大类:
车外预定路径方式:是指在行驶的路径上设置导航用的信息媒介物,AGV通过检测出它的信息而得到导向的导航方式,如视觉二维码、磁带导航、电磁导航等;
非预定路径(自由路径)导航方式:是指在AGV上储存着布局上的尺寸坐标,通过识别车体当前方位来自主地决定行驶路径的导航方式,如激光导航、SLAM方式(Simultaneous Localization And Mapping)。什么是SLAM?一张图带你认识它,机器人之思考既是SLAM需要解决的问题。

图3 SLAM需要解决的问题
AGV根据不同的应用场景已衍生出了多种导航方式,每种导航方式也许都存在相应的优劣势,但均能找到自己的“用武之地”。
三、AGV导航方式分析
早期的AGV多是用磁带或电磁导航,这两种方案原理简单、技术成熟,成本低,但是改变或扩展路径及后期的维护比较麻烦,并且AGV只能按固定路线行走,无法实现智能避让,或通过控制系统实时更改任务。
目前AGV主流的导航方式是二维码+惯导,这种方式使用相对灵活,铺设或改变路径也比较容易,但路径需要定期维护,如果场地复杂则要频繁的更换二维码,另外对陀螺仪的精度及使用寿命要求严格。

图4 视觉二维码导航
随着SLAM算法的发展,SLAM成为了许多AGV厂家优先选择的先进导航方式,SLAM方式无需其他定位设施,形式路径灵活多变,能够适应多种现场环境。相信随着算法的成熟和硬件成本的压缩,SLAM无疑会成为未来AGV主流的导航方式。
SLAM大概分为激光SLAM(2D或3D)和视觉SLAM两大类。
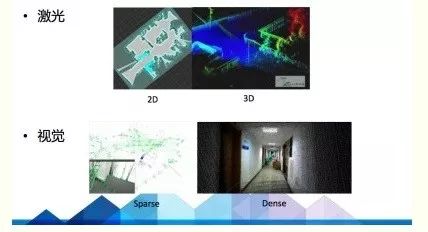
图5 SLAM分类
视觉SLAM目前尚处于进一步研发和应用场景拓展阶段。视觉SLAM因为信息量大,适用范围广等优点受到了广泛关注,但是算法对处理器的要求较高,一般需要准桌面级的CPU甚至GPU,但是AGV用的多是嵌入式处理器,所以短时间很难在小型的AGV设备上大规模应用。
图6 视觉SLAM导航
激光SLAM比视觉SLAM起步早,理论和技术都相对成熟,稳定性可靠性也得到了验证,并且对于处理器的性能需求大大低于视觉SLAM,比如主流的激光SLAM可以在普通的ARM CPU上实时运行,目前有的AGV厂家已经推出了基于激光SLAM导航的产品。无疑在一段时间内激光SLAM还是主流的SLAM方案。
图7 激光SLAM导航
ZLG致远电子推出的M6708核心板,搭载freescale l.MX6系列双核/四核Cortex-A9处理器,1G主频,支持硬浮点运算,能够处理多任务执行,外接激光雷达测距传感器,配合SLAM算法,可智能识别外部环境,实现精准快速建立环境地图,规划全局路径。
图8 M6708核心板接口资源
另外针对AGV行业ZLG致远电子还提供完整的无线联网方案和电源解决方案,有想要了解详细的AVG小车系统解决方案,欢迎在公众号留下您的联系方式。如果您有更好的解决方案和想法可以在文章底部留言,我们一起探讨。
图9 AGV无线联网方案
-
SLAM
+关注
关注
23文章
423浏览量
31820 -
AGV
+关注
关注
27文章
1302浏览量
41074 -
智能工厂
+关注
关注
3文章
997浏览量
42407
原文标题:谁会是AGV未来主流的导航方式?
文章出处:【微信号:ZLG_zhiyuan,微信公众号:ZLG致远电子】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
AGV小车的工作原理是什么?


AGV激光导航定位技术与构建地图

Agv小车有哪些车型?特点和优势是什么?适用哪些场景?

什么是AGV小车?有什么功能?适用于哪些场景?
AGV充电标准化是未来趋势

Agv无人叉车常见的5种导航方式大盘点!优缺点分析 哪种更适合你?
agv叉车怎么运行的?速度受哪些因素影响?有哪些不确定因素?

Agv叉车由什么构成?工作原理是什么?易损件有哪些?
激光,磁性,视觉?什么是AGV最好的导航系统?
AGV无人驾驶跨境运输新模式引领未来物流

更智能更柔性化,AGV导航方式的创新与演进!







 工商网监
工商网监
评论