 一文读懂组合导航模块
一文读懂组合导航模块
在介绍组合导航模块之前,先来了解下什么是组合导航技术。组合导航技术就是指采用两种或两种以上的非相似导航系统对同一信息做测量,从这些测量中计算出各导航系统的误差并进行校正。本文要介绍的就是指基于GNSS卫星导航系统和惯性导航系统的组合导航模块。
组合导航
我们日常位置信息服务打交道最多的是GNSS卫星导航系统,因此对惯性导航系统的了解比较浅显,在这里,SKYLAB君也为大家做一个详细的介绍。
惯性导航:
惯性导航是以牛顿力学定律为基础,通过测量载体在惯性参考系的加速度,将它对时间进行积分,且把它变换到导航坐标中,就能够得到在导航坐标中的速度、偏航角和位置等信息。但惯性导航系统由于陀螺仪零点漂移严重,车辆震动等因素,导致无法通过直接积分加速度获得高精度的方位和速度等信息,即现有的惯性导航系统很难长时间独立工作。
组合导航:
组合导航模块充分利用GNSS卫星导航系统和惯性导航系统优点,基于最优估计算——卡尔曼滤波算法融合两种导航算法,获得最优的导航结果;尤其是当卫星导航系统无法工作时,利用惯性导航系统使得导航系统继续工作,保证导航系统的正常工作,提高了系统的稳定性和可靠性。
组合导航优势特性:
可发现并标校惯导系统误差,提高导航精度;
弥补卫星导航的信号缺损问题,提高导航能力;
增加观测冗余度,提高异常误差的监测能力,提高系统的容错功能;
提高系统导航的抗干扰能力,提高完好性。
组合导航模块:
SKYLAB组合导航模块SKM-4DX提出了卫星导航精度的智能识别算法,基于组合导航提供的高精度导航信息,对卫星导航的定位精度进行识别,如果卫星导航精度较好,则进行组合导航,一旦发现卫星导航的定位精度进行识别,如果卫星导航精度较好,则进行组合导航,一旦发现卫星导航信号非常差甚至丢失信号,则进行纯惯性导航,总之,SKM-4DX组合导航模块实现了组合导航和纯惯性导航的自主切换。
组合导航模块
组合导航模块SKM-4DX采用GNSS(BDS/GPS系统联合定位)/INS(惯性导航)组合导航定位技术,凭借高精度六轴惯性器件和成熟的惯性算法,无需里程计或速度信号接入,且无严格安装要求,即使在隧道、车库等弱信号环境下也能为车辆提供高精度的定位模块。
组合导航模块实测路径图
卫星导航在隧道、地下停车场内无法定位,惯导模块通过在多个隧道、地下停车场内测试,均表现出了高水平的导航定位性能。
隧道、停车场实测路径图
更多组合导航模块SKM-4DX的选型应用可直接访问SKYLAB官网或阿里店铺。
发布评论请先 登录
相关推荐
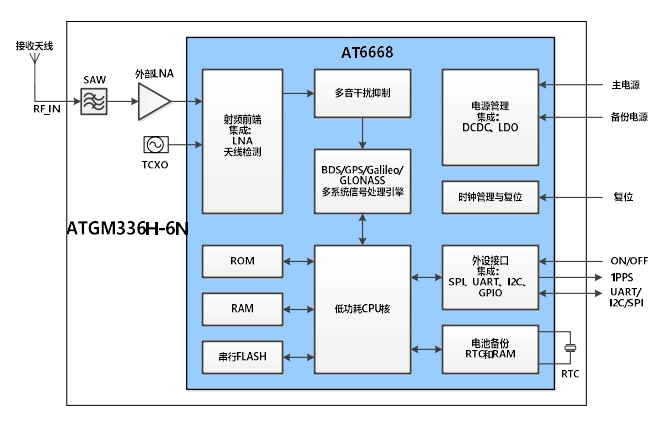
GNSS多模定位导航模块数据手册:ATGH336H-6N74
一文读懂什么是「雷电4」

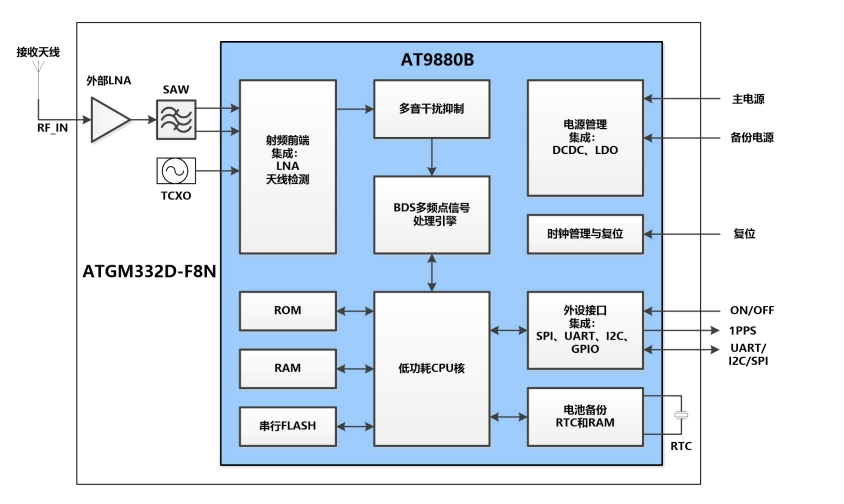
ATGM332D-F8N:高性能单北斗多频定位导航模块数据手册


ATGM336H-5N杭州中科微BDS定位导航模块技术规范
ATGM336H-5N杭州中科微BDS定位导航模块规格参数
ATGM336H-5N杭州中科微BDS/GNSS全星座定位导航模块电气参数
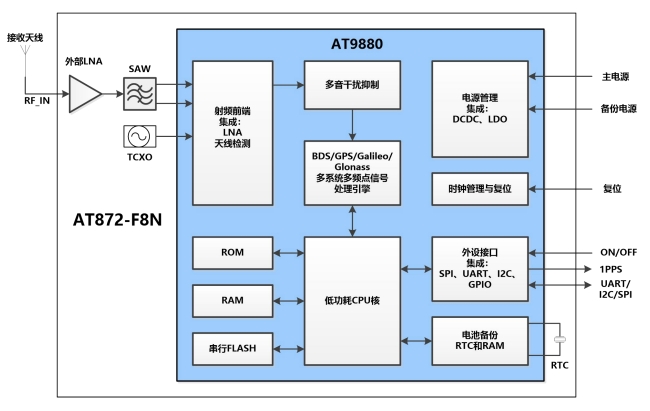
AT872-F8N高性能GNSS全模多频定位导航模块数据手册
ATGM332D-F8N低功耗单北斗多频定位导航模块资料
AGV小车上的惯性导航模块运用——SGPM02

爱普生高精度惯性导航模块赋能无人割草机新赛道






 工商网监
工商网监
评论