 一文解读can总线技术的发展现状与应用
一文解读can总线技术的发展现状与应用
CAN总线技术优点
(1)数据共享,节省成本
对于具有CAN总线接口的电喷发动机,其它电器可共享其提供的转速、水温、机油压力、机油温度、油量瞬时流速等等,一方面可省去额外的水温、油压、油温传感器,另一方面可以将这些数据显示在仪表上,便于司机检查发动机运行工况,从而便于发动机的保养维护。再比如,电涡流缓速器、空气悬架、门控制及巡航定速控制都用到车速数据,结果这些电器都有一套车速处理电路,浪费了资源。而采用总线技术后,都可以从总线上即可获得车速数据。
(2)车身布线减少,节省成本
由于采用总线技术,模块之间的信号传递仅需要两条信号线。布线局部化,车上除掉总线外,其他所有横贯车身的线都不再需要了,节省了布线成本。另外,数据共享也节省了线路,还拿车速信号打比方,在没有总线的情况,车速信号要接到电涡流缓速器、空气悬架、门控制及电喷发动机。有了总线后只要接到一处,其他电器可以通过总线共享数据。
(3)硬件方案的软件化实现,减小硬件和设计生产成本发动机点火控制,点火时必须满足下列条件:1、空档;2、钥匙处于ON档另外还需点火保护装置,以往是靠一系列继电器来实现这些功能,既不可靠又增大成本,而用软件实现,既可靠又无资金投入。软件具有错误诊断能力和自动恢复能力,节省了生产维护成本。对于总线内部错误,总线系统可以通过自身软件进行自动恢复。而非总线车辆,一旦出现故障,第一,更依赖于人工。第二,往往需要对复杂线束逐根测量。第三,需要对相关电器依次测定。整个过程非常费工时,而且准确率不高。
(4)扩充性强,产品升级快,节省新产品开发设计成本CAN节点几乎可以在不改动原有线束的情况下增加新的组件。数据稳定可靠,CAN总线具有线间干扰小、抗干扰能力强的特点。由于VITI-CAN系统采用的是模块化管理,各模块按其功能分散的摆放在车内,简化了布线并缩短了线束的长度,从而降低了耦合电流的产生,减小了线间干扰。同时在软件上,CAN总线采用短帧传输,这样使总线数据报文在传输过程中有较强的抗干扰能力。CAN总线专为汽车量身订做,可靠性有保障。CAN总线的设计充分考虑了汽车上恶劣工作环境,比如点火线圈点火时产生的强大的反冲电压,电涡流缓速器切断时产生的浪涌电流及汽车发动机舱内100℃左右的高温。CAN总线国内外发展与应用状况
CAN总线在组网和通信功能上的优点以及它的高性能价格比决定了它在许多领域都有广阔的应用前景和发展潜力。大型仪器设备系统复杂,对多种信息进行采集、处理、控制、输出等操作。如医疗器械CT断层扫描仪,为保证其可靠工作,在数据通信上要求功能块间可随意进行数据交换、通信能以广播方式进行、简单经济的硬件接口、通信线尽量少、抗干扰能力强、可靠性高并能自动进行故障识别和自动恢复。但是,这些要求长时间未能得到很好的解决,直至CAN总线技术出现才提供了一个较好的解决方法。测控系统中离不开传感器,由于各类传感器的工作原理不同,其最终输出的电量形式也各不相同,为了便于系统连接,通常要考虑将传感器的输出变换成标准电压或电流信号。即便是这样,在与计算机相连时,必
须增加A/D环节。如果传感器能以数字形式输出,就可以方便地与计算机直接相连,从而简化系统结构,提高精度。这种传感器与计算机相连的总线可称为传感器总线。实际上传感器总线仍属于现场总线,关键的问题在于如何将总线接口与传感器一体化。在广泛的工业控制领域,CAN总线可作为现场设备级的现场总线,与其它总线相比,具有很高的可靠性和性价比。这必将是CAN技术开发应用的一个主要方向。在以往的国内测控领域,由于没有更好的选择,大多采用BITBUS或RS-485作为通信总线。其不足主要有:一主多从,无冗余;数据通信为命令响应,传输率低;错误处理能力弱。采用CAN总线技术后即可解决上述问题。CAN网络上任何一个节点均可作为主节点主动地与其它节点交换数据;CAN网络节点的信息帧可以分出优先级,这对于有实时性要求的控制提供了方便;CAN的物理层及数据链路层有独特的设计技术,使其在抗干扰以及错误检测等方面的性能均大大提高。CAN的上述特点使其成为诸多工业测控领域中首选的现场总线之一。
根据国内外资料报道,CAN技术已应用于家用电器和智能楼宇以及小区建设中。如安防系统、抄表系统、家电控制等。它投资少,每个节点可以随机访问,通信速度完全满足要求,且在这类应用中数据交换量都很少。适当的网关如CAN与TCP/IP协议的转换,可以使一个居室或一栋大楼的现场CAN信息转变为Internet的形式外传,或反过来通过这类网关把外部网传来的信息转换为CAN的形式,此即实现了所谓的远程控制。
CAN总线技术在汽车中的实际应用优势
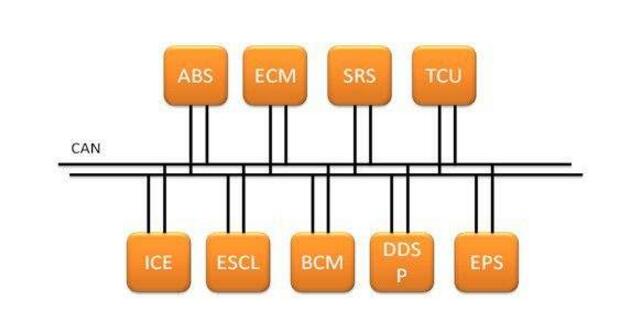
1、信息共享
采用CAN总线技术可以实现各ECU之间的信息共享,减少不必要的线束和传感器。例如具有CAN总线接口的电喷发动机,其它电器可共享其提供的转速、水温、机油压力、机油温度、油量瞬时流速等,这样一方面可省去额外的水温、油压、油温传感器,另一方面可以将这些数据显示在仪表上,便于司机检查发动机运行工况,从而便于发动机的保养维护。
2、减少线束
新型电子通讯产品的出现对汽车的综合布线和信息的共享交互提出了更高的要求,传统的电气系统大多采用点对点的单一通信方式,相互之间少有联系,这样必然造成庞大的布线系统。据统计一辆采用传统布线方法的高档汽车中,其导线长度可达2000米,电气节点达1500个,而且该数字大约每十年增长1倍。这种传统布线方法不能适应汽车的发展。CAN总线可有效减少线束,节省空间。例如某车门-后视镜、摇窗机、门锁控制等的传统布线需要20-30根,应用总线CAN则只需要2根。
3、关联控制
在一定事故下,需要对各ECU进行关联控制,而这是传统汽车控制方法难以完成的。CAN总线技术可以实现多ECU的实时关联控制。在发生碰撞事故时,汽车上的多个气囊可通过CAN协调工作,它们通过传感器感受碰撞信号,通过CAN总线将传感器信号传送到一个中央处理器内,控制各安全气囊的启动弹出动作。
CAN总线国内外发展与应用状况
CAN总线在组网和通信功能上的优点以及它的高性能价格比决定了它在许多领域都有广阔的应用前景和发展潜力。大型仪器设备系统复杂,对多种信息进行采集、处理、控制、输出等操作。如医疗器械CT断层扫描仪,为保证其可靠工作,在数据通信上要求功能块间可随意进行数据交换、通信能以广播方式进行、简单经济的硬件接口、通信线尽量少、抗干扰能力强、可靠性高并能自动进行故障识别和自动恢复。但是,这些要求长时间未能得到很好的解决,直至CAN总线技术出现才提供了一个较好的解决方法。测控系统中离不开传感器,由于各类传感器的工作原理不同,其最终输出的电量形式也各不相同,为了便于系统连接,通常要考虑将传感器的输出变换成标准电压或电流信号。即便是这样,在与计算机相连时,必须增加A/D环节。如果传感器能以数字形式输出,就可以方便地与计算机直接相连,从而简化系统结构,提高精度。这种传感器与计算机相连的总线可称为传感器总线。实际上传感器总线仍属于现场总线,关键的问题在于如何将总线接口与传感器一体化。
在广泛的工业控制领域,CAN总线可作为现场设备级的现场总线,与其它总线相比,具有很高的可靠性和性价比。这必将是CAN技术开发应用的一个主要方向。在以往的国内测控领域,由于没有更好的选择,大多采用BITBUS或RS-485作为通信总线。其不足主要有:一主多从,无冗余;数据通信为命令响应,传输率低;错误处理能力弱。采用CAN总线技术后即可解决上述问题。CAN网络上任何一个节点均可作为主节点主动地与其它节点交换数据;CAN网络节点的信息帧可以分出优先级,这对于有实时性要求的控制提供了方便;CAN的物理层及数据链路层有独特的设计技术,使其在抗干扰以及错误检测等方面的性能均大大提高。CAN的上述特点使其成为诸多工业测控领域中首选的现场总线之一。
根据国内外资料报道,CAN技术已应用于家用电器和智能楼宇以及小区建设中。如安防系统、抄表系统、家电控制等。它投资少,每个节点可以随机访问,通信速度完全满足要求,且在这类应用中数据交换量都很少。适当的网关如CAN与TCP/IP协议的转换,可以使一个居室或一栋大楼的现场CAN信息转变为Internet的形式外传,或反过来通过这类网关把外部网传来的信息转换为CAN的形式,此即实现了所谓的远程控制。
CAN总线技术及发展趋势
1、位仲裁
要对数据进行实时处理,就必须将数据快速传送,这就要求数据的物理传输通路有较高的速度。在几个站同时需要发送数据时,要求快速地进行总线分配。实时处理通过网络交换的紧急数据有较大的不同。一个快速变化的物理量,如汽车引擎负载,将比类似汽车引擎温度这样相对变化较慢的物理量更频繁地传送数据并要求更短的延时。
CAN总线以报文为单位进行数据传送,报文的优先级结合在11位标识符中,具有最低二进制数的标识符有最高的优先级。这种优先级一旦在系统设计时被确立后就不能再被更改。总线读取中的冲突可通过位仲裁解决。例如,当几个站同时发送报文时,站1的报文标识符为011111;站2的报文标识符为0100110;站3的报文标识符为0100111。所有标识符都有相同的两位01,直到第3位进行比较时,站1的报文被丢掉,因为它的第3位为高,而其它两个站的报文第3位为低。站2和站3报文的4、5、6位相同,直到第7位时,站3的报文才被丢掉。注意,总线中的信号持续跟踪最后获得总线读取权的站的报文。在此例中,站2的报文被跟踪。这种非破坏性位仲裁方法的优点在于,在网络最终确定哪一个站的报文被传送以前,报文的起始部分已经在网络上传送了。所有未获得总线读取权的站都成为具有最高优先权报文的接收站,并且不会在总线再次空闲前发送报文。
CAN具有较高的效率是因为总线仅仅被那些请求总线悬而未决的站利用,这些请求是根据报文在整个系统中的重要性按顺序处理的。这种方法在网络负载较重时有很多优点,因为总线读取的优先级已被按顺序放在每个报文中了,这可以保证在实时系统中较低的个体隐伏时间。
对于主站的可靠性,由于CAN协议执行非集中化总线控制,所有主要通信,包括总线读取(许可)控制,在系统中分几次完成。这是实现有较高可靠性的通信系统的唯一方法。
2、CAN的通信方案
有两种重要的总线分配方法:按时间表分配和按需要分配。在第一种方法中,不管每个节点是否申请总线,都对每个节点按最大期间分配。由此,总线可被分配给每个站并且是唯一的站,而不论其是立即进行总线存取或在一个特定时间进行总线存取。这将保证在总线存取时有明确的总线分配。在第二种方法中,总线按传送数据的基本要求分配给一个站,总线系统按站希望的传送分配(如:EthernetCSMA/CD)。因此,当多个站同时请求总线存取时,总线将终止所有站的请求,这时将不会有任何一个站获得总线分配。为了分配总线,多于一个总线存取是必要的。CAN实现总线分配的方法,可保证当不同的站申请总线存取时,明确地进行总线分配。这种位仲裁的方法可以解决当两个站同时发送数据时产生的碰撞问题。不同于Ethernet网络的消息仲裁,CAN的非破坏性解决总线存取冲突的方法,确保在不传送有用消息时总线不被占用。甚至当总线在重负载情况下,以消息内容为优先的总线存取也被证明是一种有效的系统。虽然总线的传输能力不足,所有未解决的传输请求都按重要性顺序来处理。在CSMA/CD这样的网络中,如Ethernet,系统往往由于过载而崩溃,而这种情况在CAN中不会发生。
3、CAN的报文格式
在总线中传送的报文,每帧由7部分组成。CAN协议支持两种报文格式,其唯一的不同是标识符(ID)长度不同,标准格式为11位,扩展格式为29位。
在标准格式中,报文的起始位称为帧起始(SOF),然后是由11位标识符和远程发送请求位(RTR)组成的仲裁场。RTR位标明是数据帧还是请求帧,在请求帧中没有数据字节。
控制场包括标识符扩展位(IDE),指出是标准格式还是扩展格式。它还包括一个保留位(r0),为将来扩展使用。它的最后四个字节用来指明数据场中数据的长度(DLC)。数据场范围为0~8个字节,其后有一个检测数据错误的循环冗余检查(CRC)。
应答场(ACK)包括应答位和应答分隔符。发送站发送的这两位均为隐性电平(逻辑1),这时正确接收报文的接收站发送主控电平(逻辑0)覆盖它。用这种方法,发送站可以保证网络中至少有一个站能正确接收到报文。
报文的尾部由帧结束标出。在相邻的两条报文间有一很短的间隔位,如果这时没有站进行总线存取,总线将处于空闲状态。
4、数据错误检测
不同于其它总线,CAN协议不能使用应答信息。事实上,它可以将发生的任何错误用信号发出。CAN协议可使用五种检查错误的方法,其中前三种为基于报文内容检查。
4.1循环冗余检查(CRC)
在一帧报文中加入冗余检查位可保证报文正确。接收站通过CRC可判断报文是否有错。
4.2帧检查
这种方法通过位场检查帧的格式和大小来确定报文的正确性,用于检查格式上的错误。
4.3应答错误
如前所述,被接收到的帧由接收站通过明确的应答来确认。如果发送站未收到应答,那么表明接收站发现帧中有错误,也就是说,ACK场已损坏或网络中的报文无站接收。CAN协议也可通过位检查的方法探测错误。
4.4总线检测
有时,CAN中的一个节点可监测自己发出的信号。因此,发送报文的站可以观测总线电平并探测发送位和接收位的差异。
4.5位填充
一帧报文中的每一位都由不归零码表示,可保证位编码的最大效率。然而,如果在一帧报文中有太多相同电平的位,就有可能失去同步。为保证同步,同步沿用位填充产生。在五个连续相等位后,发送站自动插入一个与之互补的补码位;接收时,这个填充位被自动丢掉。例如,五个连续的低电平位后,CAN自动插入一个高电平位。CAN通过这种编码规则检查错误,如果在一帧报文中有6个相同位,CAN就知道发生了错误。
如果至少有一个站通过以上方法探测到一个或多个错误,它将发送出错标志终止当前的发送。这可以阻止其它站接收错误的报文,并保证网络上报文的一致性。当大量发送数据被终止后,发送站会自动地重新发送数据。作为规则,在探测到错误后23个位周期内重新开始发送。在特殊场合,系统的恢复时间为31个位周期。
但这种方法存在一个问题,即一个发生错误的站将导致所有数据被终止,其中也包括正确的数据。因此,如果不采取自监测措施,总线系统应采用模块化设计。为此,CAN协议提供一种将偶然错误从永久错误和局部站点失败中区别出来的办法。这种方法可以通过对出错站点统计评估来确定一个站点本身的错误并进入一种不会对其它站产生不良影响的运行方法来实现,即站点可以通过关闭自己来阻止正常数据因被错误地当成不正确的数据而被终止。
4.6CAN可靠性
为防止汽车在使用寿命期内由于数据交换错误而对司机造成危险,汽车的安全系统要求数据传输具有较高的安全性。如果数据传输的可靠性足够高,或者残留下来的数据错误足够低的话,这一目标不难实现。从总线系统数据的角度看,可靠性可以理解为,对传输过程产生的数据错误的识别能力。
残余数据错误的概率可以通过对数据传输可靠性的统计测量获得。它描述了传送数据被破坏和这种破坏不能被探测出来的概率。残余数据错误概率必须非常小,使其在系统整个寿命周期内,按平均统计时几乎检测不到。计算残余错误概率要求能够对数据错误进行分类,并且数据传输路径可由一模型描述。如果要确定CAN的残余错误概率,我们可将残留错误的概率作为具有80~90位的报文传送时位错误概率的函数,并假定这个系统中有5~10个站,并且错误率为1/1000,那么最大位错误概率为10-13数量级。例如,CAN网络的数据传输率最大为1Mbps,如果数据传输能力仅使用50%,那么对于一个工作寿命4000小时、平均报文长度为80位的系统,所传送的数据总量为9×1010。在系统运行寿命期内,不可检测的传输错误的统计平均小于10-2量级。换句话说,一个系统按每年365天,每天工作8小时,每秒错误率为0.7计算,那么按统计平均,每1000年才会发生一个不可检测的错误。
CAN即控制器局域网络,属于工业现场总线的范畴。与一般的通信总线相比,CAN总线的数据通信具有突出的可靠性、实时性和灵活性。由于其良好的性能及独特的设计,CAN总线越来越受到人们的重视。它在汽车领域上的应用是最广泛的,世界上一些著名的汽车制造厂商,BENZ(奔驰)、BMW(宝马)、PORSCHE(保时捷)、ROLLS-ROYCE(劳斯莱斯)和JAGUAR(美洲豹)等都采用了CAN总线来实现汽车内部控制系统与各检测和执行机构间的数据通信。同时,由于CAN总线本身的特点,其应用范围已不再局限于汽车行业,而向自动控制、航空航天、航海、过程控制工业、机械工业、纺织机械、农用机械、机器人、数控机床、医疗器械及传感器等领域发展。CAN已经形成国际标准,并已被公认为几种最有前途的现场总线之一。
-
CAN总线
+关注
关注
145文章
1959浏览量
131246
发布评论请先 登录
相关推荐
浅谈生物传感技术的定义、发展现状与未来

CAN总线技术的未来趋势



医疗机器人发展现状与趋势
工控机厂家发展现状及未来趋势

CAN/CAN FD/CAN XL三大总线协议解读,是逐步替代关系吗?
技术小课堂 | CAN总线应用常见问题(1)






 工商网监
工商网监
评论