 L4/L5无人车为什么需要精确的定位系统?
L4/L5无人车为什么需要精确的定位系统?
在第三期《Hello Apollo,自动驾驶公开课》上,来自百度Apollo核心算法技术的负责人万国伟,为大家分享了《Apollo 2.0多传感器融合定位模块》,以下是分享的全部内容。
Apollo 核心算法技术负责人万国伟
L4/L5无人车为什么需要精确的定位系统?精确是指厘米级,也就是说10厘米以内。如果人开车的话,会关注什么?我们会关注车道线、道路指示牌、红绿灯这些交通标识,路肩、路边柱子,建筑物,这些都是场景中的静态物体,关注它们是因为人需要知道车的可行使范围、以及需要规划车的行驶路径。我们还会关注一些动态的物体,比如对面开过来的摩托车。
定位系统可以与高精地图配合提供静态场景感知,可将感知得到的动态物体正确放入静态场景,而位置和姿态用于路径规划和车辆控制。因此定位系统对于无人驾驶至关重要。
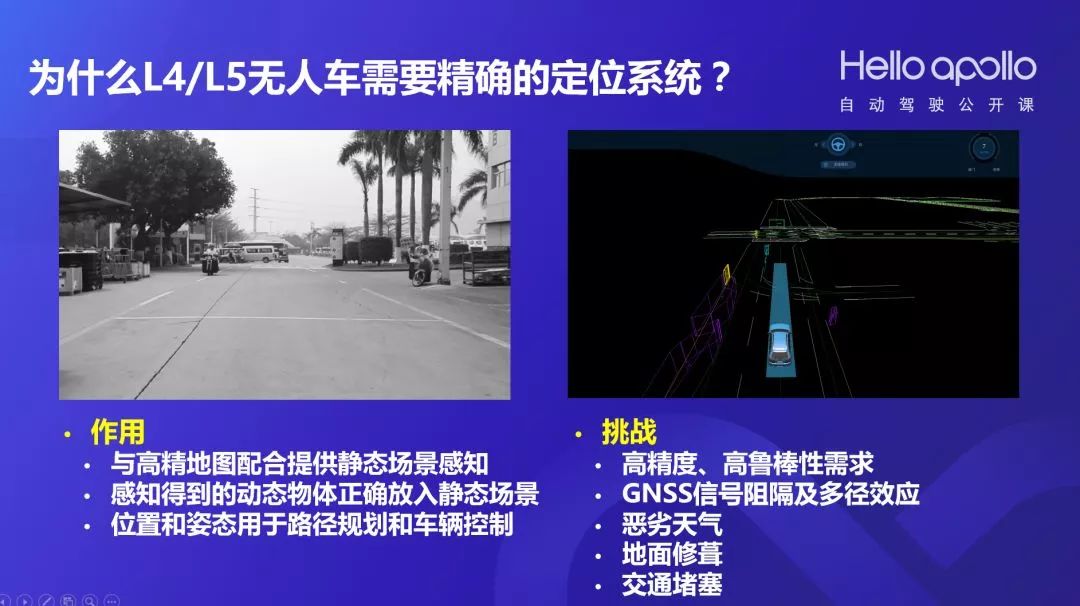
而要获得精确的定位,也面临很多挑战,譬如:定位需要非常高精度和高鲁棒性;GPS信号遇到阻隔会引起信号丢失;在复杂的城市环境中,由于建筑物和植物的存在,引起多镜效应导致定位不准;由于天气情况,或者人为修缮,会导致定位精度不高。
三种定位技术
了解了定位系统的重要性,我们来看看定位技术的分类。

从定位方式上可分为三类。
第一类,基于信号的定位,它的代表就是GNSS,其实就是全球导航卫星系统;
第二类,航迹推算,依靠IMU等,根据上一时刻的位置和方位推断现在的位置和方位;
第三类是环境特征匹配,基于Lidar的定位,用我们观测到的特征和数据库里的特征和存储的特征进行匹配,得到现在车的位置和姿态。
这三种定位方式各有优劣。
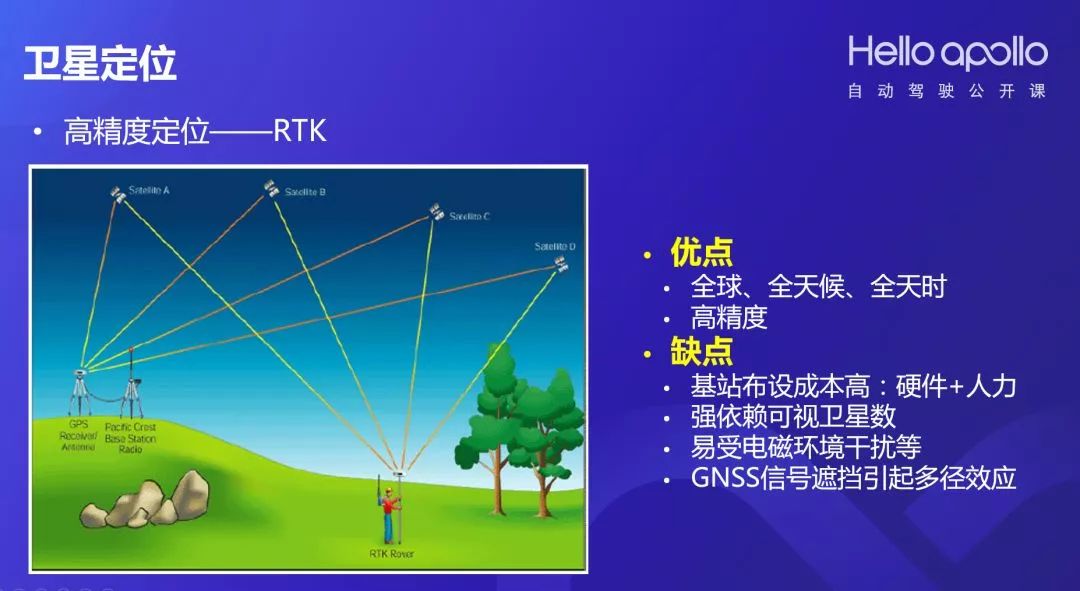
第一种卫星定位,RTK差分技术出现后,精度稳步提高。差分技术,是在一个精确的已知位置(基站)上安装GNSS监测接收机,计算得到基站与GNSS卫星的距离校正。差分分为位置差分和距离差分。RTK差分可以达到厘米级定位。RTK存在的问题有:基站铺设成本较高;非常依赖卫星数量,比如在一些桥洞和高楼大厦的环境下,可视的卫星数量会急剧下降;容易受到电磁环境干扰。在受到遮挡时,信号丢失,没有办法做定位。

第二种捷联惯性导航( SINS),是利用惯性测量元件(陀螺仪、加速度计)测量得到的载体相对于惯性空间角运动和线运动参数,经过惯性导航解算得到载体的速度、位置、姿态。捷联是相对于平台来说的。惯性测量单元(IMU)主要由陀螺仪和加速度计组成。加速度计能够测量出载体相对于惯性空间所受的力;陀螺仪能够测量出载体沿陀螺仪轴向的旋转角速度或旋转增量。IMU是惯性导航系统的基础,直接决定了惯性导航系统所能够达到的精度。
惯性导航(简称惯导)的基本工作原理是以牛顿力学定律为基础。惯导系统的价格很高。惯导系统通过陀螺仪获知航向和姿态角,通过加速度得到速度,进而形成导航坐标系;通过速度得到位移,可以得到六自由度的信息。优点是输出频率非常高,短时精度高,缺点就是误差随着时间累积。

第三种激光定位,要预先制作定位地图,不管是3D的还是2D地图。激光点云定位一般预先制作地图,然后用车上的实时点云和地图进行匹配,来计算激光雷达的位置和姿态,再通过激光雷达与IMU之间的外参,得到IMU的位置和姿态。匹配有很多种方法,可以是基于3D点云匹配的ICP方法,也可以是我们这里给出的基于2D概率地图的直方图滤波器匹配定位。激光定位的优点是在没有GPS情况下可以工作,鲁棒性比较好;缺点就是需要预先制作地图,同时要定期更新地图(因为环境会发生变化),雨雪天气也会受到影响(因为Lidar被折射的比较多,收到的点云数据变少)。
基于以上三种定位技术,百度提出多传感器融合的定位系统,既做到优势互补,也提高了稳定性,增强了定位精度。
多传感器融合定位

定位技术横跨好几个专业,包括测绘、导航、计算机视觉知识、以及点云处理的知识。

Apollo2.0的多传感器融合定位模块的框架如下图所示:
左边列出了定位模块依赖的硬件以及数据,包括惯性测量单元IMU、车端天线、基站、激光雷达、以及定位地图;
中间是GNSS定位以及激光点云定位模块,GNSS定位输出位置及速度信息,点云定位输出位置及航向角信息;
右边是融合框架,融合框架包括两部分:惯性导航解算、Kalman滤波;
融合定位的结果会反过来用于GNSS定位和点云定位的预测;
融合定位的输出是一个6-dof的位置和姿态,以及协方差矩阵。
点云定位

先介绍点云定位子模块。
点云定位的输入是融合定位提供的预测位置和姿态、以及激光雷达的点云。点云定位主要包含有两个步骤:航向角优化、(x, y)计算,分别对应图像对齐、SSD-HF(直方图滤波器)两个部分。点云定位会输出x, y, z, yaw,z是通过定位地图来获取的。
关于点云定位,它有三个输入:融合定位提供的预测姿态、Lidar点云、定位地图。在点云子模块中包含两个功能:yaw优化和XY计算。Yaw优化用到了图像对齐,XY计算用了滤波器,最后会输出XY和yaw,也输出了一个Z。

先介绍XY怎么做,百度的方法是基于直方图滤波器,就是SSD。SSD是Sum of Squared Difference,是一种常用的度量方法,也叫差方和。
把每个激光点的反射值或者高度值和定位地图对应值相减,然后把差的平方加起来,每个度量值越小说明位置匹配的越好。

怎么匹配多个位置?我们用二维直方图滤波器,将其中心放在预测姿态(x0, y0),滤波器一般选择21*21,那么搜索的范围就是2.6米* 2.6米,需要计算441个位置的SSD值。
我们可以看到有的地方匹配的比较好,比较好的就是红色值,比较差的是蓝色,绿色是过渡。

在直方图滤波器计算前,我们会对yaw做一次优化。
yaw的优化,即对航向角的优化。因为融合定位的时候很容易产生角度的误差,如果用低端的IMU更容易产生,尤其是最开始的时候误差非常大。在航向角有1.5度误差的时候,明显的看出来已经有较大偏差,为什么会有这么大的偏差?这个时候我们要做航向角的优化,如果不做,直接做SSD直方图分布,可以看到它会集中在一个区域,经过平均以后,位置大概在另一区域,和真值差了一米多,那就偏了。处理方法用的是图像处理Lucas-Kanade算法,主要是做图像的对齐。

对于反射值和高度值,做匹配的时候怎么联合起来?比如:左边有一个路段,反射值和匹配值经过平均以后,得到的位置会偏的很多,这时高度值定位非常好。用固定的方法加在一块,仍然得不到很好的分布,所以我们采用了自适应融合的方式,也就是说反射值和高度值分别计算直方图分布,由直方图分布的优劣来决定其权重。
我再举另一个例子,这是真实的路测例子,在扫描地图的时候路是这样的,后来他们重新铺设了,定位的时候只用反射值就会有误差。红色的是真值,蓝色是定位的结果。如下图左边所示,红色蓝色偏离的很厉害,这是非常危险的。调成固定权重的模式会好一点,如果采用自适应权重,则非常吻合。
GNSS-RTK定位
下面我们介绍GNSS-RTK定位。
现在惯导芯片一般都会配一个板卡(NovAtel也卖这样的板卡),直接集成了RTK的定位结果。为什么我们还需要自己开发GNSS-RTK呢? 从系统的角度考虑,需要每个子模块都是可控的,举一个简单的例子,当给出一个定位结果偏了,但给出的方差很小,也就是置信度很高。我们是没办法知道原因的。

简单说一下它的原理,用GNSS天线获得车载原始的观测数据,通过3G、4G数据传输得到基站的原始观测,先做一个基于RAIM的车辆单点定位。单点定位的时候我们只知道大概的位置,再找基站和天线的共视星,然后做单差和双差。
单差是通过单差伪距和载波观测值作为EKF的时间更新,双差是构建双差模糊度与协方差,之后使用LAMBDA固定双差模糊度,然后使用固定模糊度后的载波完成量测更新。最后做融合定位。
上图中,RAIM是根据用户接收机的多余观测值监测用户定位结果的完好性,其目的是在导航过程中检测出发生故障的卫星,并保障导航定位精度。LAMBDA方法是指Least-squares AMBiguityDecorrelation Adjustment。
惯性导航及融合定位
接下来我们介绍惯性导航及融合定位。

我们引入几个坐标系,第一个是惯性坐标系(ECI),z轴是地球自转轴,x,y在赤道平面,x, y不随地球自转;第二个是地心地固坐标系(ECEF),第三个是导航坐标系,第四个是载体坐标系。IMU的比力和角速度测量都是载体坐标系在惯性坐标系下的测量。一般情况下,都会建立一个导航坐标系,在导航坐标系下进行位置和姿态输出。(加速度计测量的不是载体的运动加速度,而是载体相对惯性空间的绝对加速度和重力加速度之和,称作“比力”。)
在这里我们简化一下,只考虑载体坐标系和惯性坐标系。
我们来解释一下导航解算的原理,它分下面几步:
1. 姿态更新,对陀螺仪输出的角速度进行积分得到姿态增量,叠加到上次的姿态上;
2. 比力坐标转换,是从IMU载体坐标系到位置、速度求解坐标系(惯性坐标系);
3. 速度更新,速度这一步需要考虑重力加速度的去除,得到惯性系下的加速度,通过积分得到速度;
4. 位置更新,通过积分得到位置。

在惯性导航中,提到了导航方程的每一次迭代都需要利用上一次的导航结果作为初始值,因此在使用惯导之前必须进行初始化。初始位置和初始速度信息需要外部提供,一般是GNSS。
姿态对准是指得到IMU的roll,pitch, yaw;roll, pitch的对准过程一般称为调平:当车静止时,加速度计测量的比力仅由重力导致,可以通过f=C*g来求解;对于非常高精度的IMU可通过罗经对准的方式,车静止,通过测量载体系中的地球自转来确定载体的方位(yaw)。
对于车上使用的IMU,没那么高等级,一般采用两种方式:车直线跑起来,用从GNSS获取的速度方向来估计航向;第二种方式是采用双天线GNSS,通过两个位置连线来计算航向。

介绍完GNSS定位、点云定位以及惯性导航解算以后,我们看这几个模块怎么融合到一起。这里使用了Kalman滤波器的松耦合,意思就是我们只用了位置、姿态和速度做融合。
我们使用松耦合的方式把惯性导航解算、GNSS定位、点云定位三个子模块融合在一起。松耦合的数据只有位置、速度、姿态,紧耦合会包括GNSS的导航参数、定位中的伪距、距离变化等。
我们使用了一个误差卡尔曼滤波器,惯性导航解算的结果用于kalman滤波器的时间更新,也就是预测;而GNSS、点云定位结果用于kalman滤波器的量测更新。
Kalman滤波会输出位置、速度、姿态的误差用来修正惯导模块,IMU期间误差用来补偿IMU原始数据。

这里单独把我们所做的Kalman滤波拿出来,如果做GNSS定位输出和点云定位的时候,我们会发现GNSS定位非常快,只要有原始消息就可以快速解算,但是点云定位的时间比较长,需要几十毫秒甚至上百毫秒,会出问题。也就是我们先收到的消息解算时间很长,才会有结果,会造成量测更新的乱序。我们解决这个问题的思路是用了两个滤波器,一个滤波器是Filter1,主要是做时间更新,实时的对外提供服务;量测更新是Filter2,我们会把Filter1的状态拷贝过来做量测更新,还会补齐最新时刻,用的是时间更新的方式,最后用Filter2代替Filter1,这样就解决了时间戳乱序的问题。
参考的论文如下:
Robustand Precise Vehicle Localization based on Multi-sensor Fusion in Diverse CityScenes, ICRA, 2018.
对GNSS及惯导感兴趣的朋友,可以读一下这两本书:
•《Principles of GNSS, Inertial, and Multisensor Integrated NavigationSystems(Second Edition)》
•《GNSS与惯性及多传感器组合导航系统原理》,国防工业出版社
Apollo 2.0中定位的使用
下面介绍Apollo2.0中定位的使用。

在Apollo工程中,我们提供了一键式定位地图制作,是在(Apollo-scripts/msf/simple/map/creator.sh)。提供的是简单制图工具,当RTK不准时,做出来的图是模糊的。因为做图是很复杂的,Apollo2.0没有提供做图的功能,但是给它一个pose准确的文件,它可以帮你做出定位地图。

下面介绍一下使用方式。要使用Apollo2.0中的多传感器融合定位模块,需要将localization_type设置为MSF;MSF定位也有多种定位模式:可以在localization/conf/localization.conf文件中设置。
上图是测试案例,首先是在中关村测试的。第一幅图楼房比较多,所以信号遮挡比较厉害,第二幅图有很多高的树,对道路有遮挡,信号也特别差,这两个都算是弱GPS环境。另一个测试是在桥洞和地下车库的环境,桥洞刚开始有信号,之后丢失了,但是依然会跑得很好。大家可以看到GPS已经飞掉了,我们的定位仍然很准。车库没有GPS,只有Lidar定位,但定位系统在车库里也可以工作。
QA问答
提问环节
01Q
想咨询您三个问题,
第一是我们都知道需要高精度定位,百度也选择精度比较高的系统,你们认为L4、L5级别的自动驾驶到底需要哪个级别的传感器?对它的精度有没有量化的指标?
第二个问题,您刚才讲到的滤波模型中,我想请教有没有考虑车辆约束,因为我们主要运用在车上,(能否)利用转向模型等来辅助它的解算滤波器?
第三个问题是关于功能安全,这方面你的定位系统有没有考虑?
A
第一个问题,除了高端的定位系统,我们现在也在做低端的IMU融合定位,价格是万元级,定位结果也很好。
第二个问题,你说的应用于车辆约束的条件,我们是有所考虑的。如果某个模型需要和我们的滤波模型放到一起,我们要在数学上推导通了才能应用。我们也做了简单的实验,主要是对横向的约束,车行驶过程一般不可能出现大的横向偏离,假设它的横向偏离非常小,这做了约束,但是方式比较简单,也是在滤波器的考虑范围内。你说的整车(横向偏离)运动模型我们还没有考虑,这是很好的方向。
第三个问题,关于主动安全,我们有专门的安全团队负责。我主要负责定位系统,我会告诉我的上下游模块现在是不是有问题,会对显示界面提示,还会做监管的措施。我们的定位模块主要输出自己的数据和状态。
02Q
刚才说的几种定位模式,在激光雷达加惯导时的滤波模型,和之前的GPS融合一样吗?
A
是一样的。我介绍了松耦合的结构,量测更新不区分GNSS和Lidar定位,完全可以做。
03Q
在点云定位中,会有定位不准的情况吗?
A
点云定位在环境匹配的失败,会有,但是我们会输出点云定位的置信度,置信度比较低时,卡尔曼滤波对量测更新采信度特别低。
04Q
如果在恶劣环境中经过几十秒甚至几分钟,定位会失败吗?比如周边有大车。
A
有大车的情况下,有时会出现定位失败;用了自适应算法以后明显提高很多。
05Q
Intensity会随着激光看到的距离甚至角度有改变,不同的激光对同一个物体也有变化,我想问一下怎么做到类似情况的处理?
A
有很多方式可以处理这种事情,比如做反射值标定。据你事先采集的场景,然后把数据合到一起,用比较准的pose投到上面,每根线做标定,相当于你给0到255的颜色值都返回标定以后的反射值。但是目前我们没有用在模块里,因为一般没有太大的影响,加上我们用了高度值以后,两者融合后不会产生太大的影响。
06Q
刚才提到会有多径的情况,据我了解即使在这种情况下可能GPS会给你反馈,即使发生多镜情况还可能给你返回精度特别高的信息,比如它的协方差特别小。
A
你说的这种情况是存在的,但是它不是非常频繁的出现,是偶发。这会给我们产生比较大的影响,虽然这个概率特别低,所以我们自己做了一套GNSS定位模块,我们想通过自己的模块去看为什么会发生那样的情况,我们去找它的观测量特征去剔除这样的情况。我们不需要你时时刻刻都很准,但是你不准的时候要告诉我们,因为我们还有Lidar定位。
07Q
比如在山洞里,可能只有左右方向的约束,前后没有,往前走一米可能还是一模一样的特征,你们遇到走山洞情况怎么处理的?
A
桥洞我们也跑过,高度约束只能左右,前后卡的不是很好。但是我们走过的桥洞,地上都会有车道线,反射值给它前后的约束、纵向约束特别好,也可以过去,就算是没有这些特征,惯导平滑也会做得特别好。
-
传感器
+关注
关注
2554文章
51700浏览量
758544 -
无人驾驶
+关注
关注
98文章
4107浏览量
121471 -
Apollo
+关注
关注
5文章
345浏览量
18553
原文标题:自动驾驶公开课 | Apollo 2.0多传感器融合定位模块
文章出处:【微信号:Apollo_Developers,微信公众号:Apollo开发者社区】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论