 MIT研发RoadTracer,它能够将地图绘制精度提高45%
MIT研发RoadTracer,它能够将地图绘制精度提高45%

RoadTracer(道路追踪器) 系统从道路上已知的位置开始,使用神经网路检查周边地区,以确定哪些点最有可能成为下一部分的道路。系统将最有可能的一点添加进地图,不断重复上述步骤,慢慢追踪出这条道路。它能够将地图绘制精度提高45% ,这对于谷歌这样的科技巨头所构建的自动化地图绘制系统来说至关重要。
地图类应用对现实世界影响深远,然而已经绘制出的地图却仅仅是现实世界的一小部分。
地图绘制是一件尤其乏味的工作:即使在拍摄了航拍图像之后,谷歌之类的科技巨头仍然需要耗费很多时间去手动绘制地图。因此到目前为止,科技巨头们还未完成全球约 2000 多万英里道路的地图绘制工作。
此外,地图信息的缺失一直是一个棘手的问题,尤其对于仍处于开发阶段的自动驾驶汽车系统来说更是如此。
为了解决这一问题,麻省理工学院计算机和人工智能实验室(CSAIL)的研究员们研发了一种自动构建路线图的方法——RoadTracer(道路追踪器),比现有方法的精确度高出 45%。
该团队表示,在利用航拍图像数据的基础上,RoadTracer 不仅比现有方法更加精确,而且更具成本效益。
麻省理工学院的教授 Mohammad Alizadeh 认为,这项工作不仅会对谷歌这样的科技巨头起到作用,对一些缺乏资源创建地图、纠正地图错误的小型机构来说也是大有助益。
「RoadTracer 非常适合绘制那些经常需要更新地图的区域,其中包括人口较少但却频繁施工的地方,」Alizadeh 说道,Alizadeh 近期与他人联合发表了一篇关于 RoadTracer 的论文。
「以泰国郊区为例,一些偏远郊区的地图经常丢失了很多道路信息。RoadTracer 可以帮助绘制出更加精确的地图。」
在使用纽约市航拍图像的测试中,RoadTracer 可以正确绘制出 44% 的道路交叉口,不仅准确度比基于图像分割的传统方法 (通常只能绘制出 19%)高出两倍,而且在效率上也不遑多让。
这篇论文将在 6 月份犹他州盐湖城举办的计算机视觉和模式识别会议(CVPR)上发布。本文是麻省理工学院 CSAIL 实验室和卡塔尔计算机研究所(QCRI)合作的成果。
Alizadeh 方面在麻省理工的合著者还包括 Fayven Bastani 和 Songtao He 等研究生以及 Hari Balakrishnan、Sam Madden 和 David DeWitt 等教授。
QCRI 方面的合著者包括高级软件工程师 Sofiane Abbar 和 QCRI 数据分析小组的研究主管 Sanjay Chawla。
RoadTracer 系统如何创建地图?
训练神经网络识别航拍图像是当前自动化地图绘制领域的常用方法,使用神经网络识别单个像素点,将其归类为「道路」或是「非道路」。
因为航拍图像通常模糊不清并且不甚完整,因此这类系统的运作通常还需要一个后续的处理步骤,来 填补图像中的空白。
不幸的是,这些所谓的「分割方法」往往不大精确:如果模型错误地标记了一个像素点,这个错误将会在最终成型的地图中被放大。
尤其是当航拍图像中包含树木、建筑和阴影等干扰因素时,会模糊地图中道路的开始与结束点,在这样的情况下,错误尤其可能出现。(后处理步骤还需要根据仅有少量情况成立的假设作出决策,比如因为两条道路彼此间隔很小就将其相连等。)
相比之下,RoadTracer 系统则是一步一步地创建地图。
从道路上已知的位置开始,使用神经网路检查周边地区,以确定哪些点最有可能成为下一部分的道路。系统将最有可能的一点添加进地图,不断重复上述步骤,慢慢追踪出这条道路。
Bastani 表示,「RoadTracer 并非同时检索地图中成千上万个不同的点,决定它们分别代表道路的哪一部分,而是首先着眼于一个简单的问题,即从一个已知道路的特定地点出发,再决定向哪个方向探索。在很多方面,这和我们人类构建周围世界的心智模型的方式很像。」
该团队使用了北美和欧洲的六个国家共计 25 个城市的航拍图像在 RoadTracer 上进行训练,然后又在另外 15 座城市评估了这个工具的绘图能力。
「测绘系统需要在未训练过的城市中达到优异的效果,这一点非常重要,因为那些地图不存在或是不准确的区域才是 RoadTracer 大显身手的地方。」Balakrishnan 说道。
Bastani 表示,RoadTracer 能够将错误率降低 45% 这一事实,对于谷歌这样的科技巨头所构建的自动化地图绘制系统来说至关重要。
「如果错误率太高的话,比起从推测的地图中移除错误道路,还是从头开始手动绘制地图更加有效。」
尽管如此,实施像 RoadTracer 这样的方式并不会让人类 完全当一个旁观者。该团队表示 RoadTracer 的参与方式首先是绘制出大区域的路线图,随后让人类专家仔细地进行二次检查。
Alizadeh 说道,「很明确,RoadTracer 系统可以大大减少人类要完成的繁复工作。」
事实上,RoadTracer 的渐进式绘图法有一个优点,它可以更容易地纠正错误——这样人类监督者可以简单地纠正错误,并从出错的地方重新运行算法,而不是像往常那样由当前不准确的信息继续探索地图的其他部分。
当然,航拍图像只是图像绘制中众多问题的一部分。航拍图像不会显示天桥和地下通道的信息,从空中根本不可能确定这些信息。
因此,该团队还开发了可以从 GPS 数据创建地图的算法,并将这些方法合并到单个系统中进行地图绘制。
目前,这个项目得到了卡塔尔计算研究所的部分支持。
-
自动驾驶
+关注
关注
794文章
14979浏览量
181397 -
地图绘制
+关注
关注
0文章
4浏览量
2496
原文标题:MIT研发RoadTracer,大大提高自动驾驶的「地图绘制」精度
文章出处:【微信号:IV_Technology,微信公众号:智车科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
45W单输出工业DIN导轨电源DR - 45系列:性能与设计解析
为什么自动驾驶方案不再强调地图了?

提高步进伺服系统精度的措施

CAD如何绘制螺旋线

自动驾驶中如何将稀疏地图与视觉SLAM相结合?

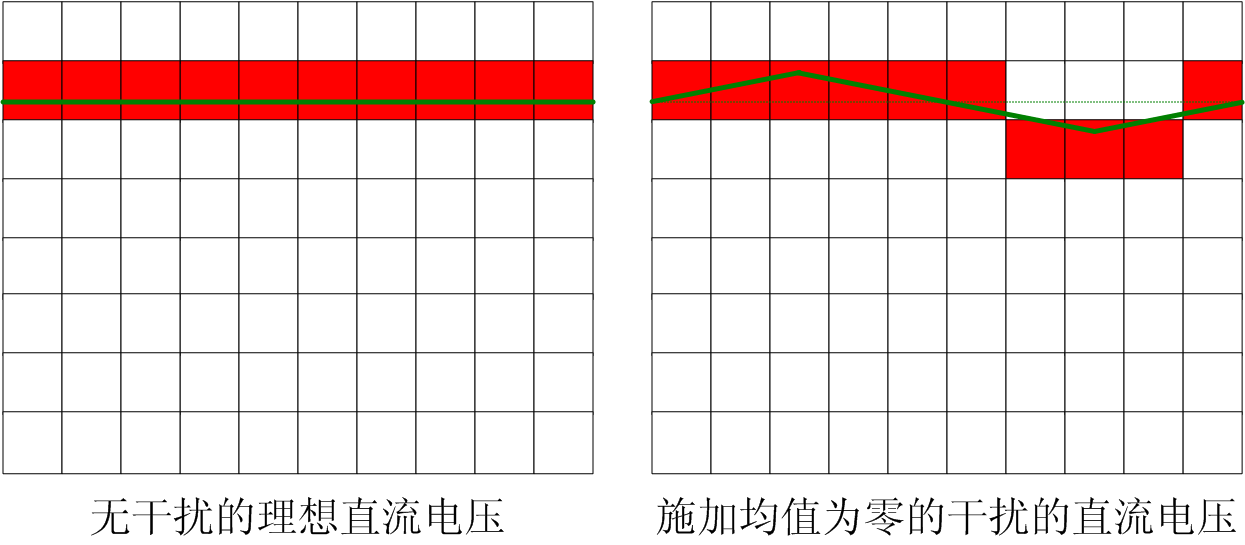
干扰可以提高测量精度,是真的吗?
实时生成式地图对于自动驾驶来说有什么作用?

如何制作一张自动驾驶高精度地图?

自动驾驶中常提的高精度地图是个啥?有何审查要求?

鸿蒙地图功能开发【3. 代码开发】##地图开发##
鸿蒙地图功能开发【1. 开发准备】##地图开发##
滚珠螺杆的预压技术是如何提高精度的?



评论