 CAN总线通信报文验收滤波、位定时与同步详解
CAN总线通信报文验收滤波、位定时与同步详解
CAN(Controller Area NetWork)总线,即控制器局域网总线,是由德国Bosch公司于1982年开发和推出的最早用于汽车内部测量与执行部件之间的数据通信协议。在20多年的历史中,CAN总线在许多领域得到了应用,是到目前为止唯一有国际标准的现场总线。CAN现场总线按照国际标准化组织ISO提出的“开放系统互联(OSI)”参考模式,实现其中的物理层、数据链路层和应用层。CAN控制器用来实现CAN总线协议。本文主要对CAN总线通信报文验收滤波、位定时与同步做了详细介绍,具体的跟随小编一起来了解一下。
一、CAN总线通信报文验收滤波
1、验收滤波器的特点和功能
1)验收滤波器的特点
LPC2000系列ARM微控制器是采用ARM7TDMI-S内核的32位嵌入式微处理器,内嵌2路或4路CAN控制器和验收滤波器。验收滤波器为CAN控制器提供全局的报文标识过滤功能。它包含一个512×32(2 KB)的RAM,在这2 KB的RAM中可以设置1~5个报文标识符表,形成一个查找表LUT(LookUp Table)。整个查找表可以容纳1024个标准标识符或512个扩展标识符,或两种混合类型的标识符。5个可能的标识符表格包括FullCAN的标准标识符表和独立标准标识符表、标准标识符范围表、独立扩展标识符表以及扩展标识符范围表。这5个表格不是必须同时存在,可以根据需要裁减。如果一个表格的起始地址等于下一个表格的起始地址或表格终止寄存器的数值,则该表格为空,在处理中将被忽略。
2)验收滤波器的功能
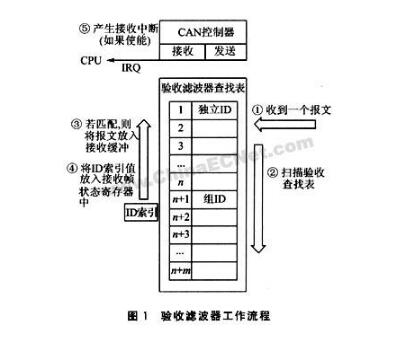
LPC2000系列ARM微控制器的CAN验收滤波器有2种工作模式:一种是一般模式;另一种被称为“FullCAN模式”。在一般模式下,当 CAN控制器的接收端收到一个完整的标识符时,它将通知接收验收滤波器。验收滤波器响应这个信号,读出CAN控制器编号和标识符大小(标准标识符11位或扩展标识符29位);然后搜索LUT,查找匹配的标识符。如果找到匹配的标识符,则通知CAN控制器将接收的报文放入CAN控制器接收缓冲中;否则,放弃接收到的这一帧信息。其工作流程如图1所示。
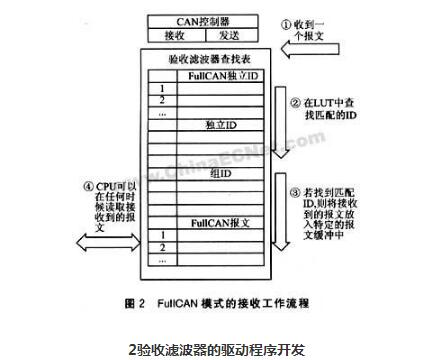
如果使能FullCAN模式,且CAN控制器报告产生的是一个标准标识符,则验收过滤器首先查询FullCAN标准标识符表,然后在FullCAN模式下处理接收。如果在FullCAN标准标识符表中没有找到匹配的ID,则依次查找下一个存在的表格,直到找到匹配者或查找表结束。一旦发现匹配的ID,就将接收到的报文放入特定的报文缓冲中而不是CAN控制器接收缓冲中,这个特定的缓冲位于验收滤波器的RAM中,而且是在LUT的最后部分。CPU可以在任何时候读取接收到的报文。FullCAN模式的接收工作流程如图2所示。
2、验收滤波器的驱动程序开发
2.1、验收滤波器寄存器描述
以LPC2292为例说明其验收滤波器驱动程序的开发。在LPC2292中内嵌2路CAN控制器,它的验收滤波器寄存器如表1所列。注意:这里的起始地址是以验收滤波器RAM的起始地址为基本地址的偏移。如在一般模式下,SFF_sa=O表示独立标准帧标识符的起始地址位于0xE0038000 处。
一个表格的大小由其前后2个表格起始地址寄存器的差值决定。例如,SFF_GRP_sa-SFF_sa为独立标准帧标识符查找表格大小。若其值为0,即SFF_GRP_sa=SFF_sa,则独立标准帧标识符查找表格大小为0,在查找时此表格将被忽略。查找表结束寄存器ENDofTable代表查找表结束地址,ENDofTable-EFF_GRP_sa为扩展帧组标识符查找表大小。验收滤波器寄存器AFMR控制其工作模式,具体定义如表2所列。

2.2、查找表中标识符格式
①FullCAN的标准标识符表和独立标准标识符表。
要注意的是,每个FullCAN的标准标识符表和独立标准标识符表都必须按升序排列,即标识符1大于标识符O;否则,在AF中将引起表格错误而使接收过滤失败。表格格式如下:

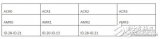
②标准标识符范围表。标识符上边界和下边界(包括上下边界)之间的ID为允许通过ID。表格格式如下:

③独立扩展标识符表。1个独立扩展标识符占1个字,而且需要按升序排列。表格格式如下:

④扩展标识符范围表。它总是成对出现,占用2个字,因此合法的表格必须以偶数个字出现,而且必须按升序排列。表格格式如下:

2.3、验收滤波器驱动程序的设计
根据以上说明,就可以设计验收滤波器的驱动程序了。以LPC2292为例来说明如何设计驱动程序。
假定独立标准标识符有ID0和ID1两个,依次按升序排列,组标准帧标识符范围为ID2~ID3(ID2www.mesnet.com.cn--编者注)
3、结论
LPC2000系列ARM微控制器的CAN验收滤波器能够有效地屏蔽总线上不允许通过的报文,大大减轻了CPU的负担,在以CAN总线为通信网络的应用中发挥了很大的作用。
二、CAN总线位定时和同步详解
CAN(Controller Area Network)是有效支持分布式实时控制的串行通讯网络。从位定时的同步方式考虑,它实质上属于异步通讯协议,每传输一帧,以帧起始位开始,而以帧结束及随后的间歇场结束。这就要求收/发双方从帧起始位开始必须保持帧内信息代码中的每一位严格的同步。从位定时编码考虑,它采用的是非归零编码方式,位流传输不像差分码那样可以直接用电平的变化来代表同步信号,因此为保证同步质量,CAN协议定义了自己的位同步方式:硬同步和重同步。
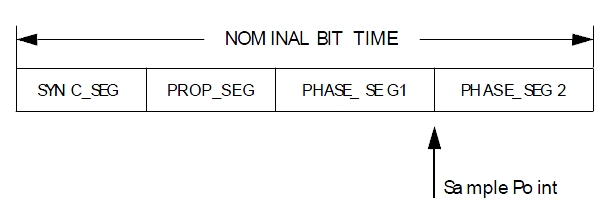
1、位周期的结构

2、同步机制
CAN总线的位同步只有在节点检测到“隐性位”(逻辑1)到“显性位”(逻辑0)的跳变时才会产生,当跳变沿不位于位周期的同步段之内时将会产生相位误差。该相位误差就是跳变沿与同步段结束位置之间的距离。如果跳变沿发生在同步段之后采样点之前为正的相位误差;如果跳变沿位于同步段之前采样点之后为负的相位误差。相位误差源于节点的振荡器漂移,网络节点之间的传播延迟以及噪声干扰等。CAN协议规定了两种类型的同步:硬同步和重同步。
2.1、硬同步
硬同步只在总线空闲时通过一个下降沿(帧起始)来完成,此时不管有没有相位误差,所有节点的位时间重新开始。强迫引起硬同步的跳变沿位于重新开始的位时间的同步段之内。
2.2、重同步
在消息帧的随后位中,每当有从“隐性位”到“显性位”的跳变,并且该跳变落在了同步段之外,就会引起一次重同步。重同步机制可以根据跳变沿增长或者缩短位时间以调整采样点的位置,保证正确采样。
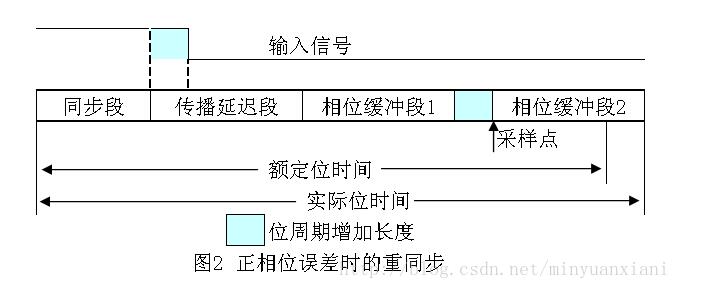

如图2,跳变沿落在了同步段之后采样点之前,为正的相位误差,接收器会认为这是一个慢速发送器发送的滞后边沿。此时节点为了匹配发送器的时间,会增长自己的相位缓冲段1(阴影部分)。增长的时间为相位差的绝对值,但是上限是重同步跳转宽度SJW。
如图3,跳变沿落在了采样点之后同步段之前,为负的相位误差,接收器把它解释为一个快速发送器发送的下一个位周期的提前边沿。同样节点为了匹配发送器的时间,会缩短自己的相位缓冲段2(阴影部分),下一个位时间立即开始。缩短的时间也为相位差的绝对值,上限是重同步跳转宽度SJW。
相位缓冲段只在当前位周期内被增长或者缩短,接下来的位周期,只要没有重同步,各段将恢复为位时间的编程预设值。
当相位差的绝对值小于或者等于重同步跳转宽度SJW时,重同步和硬同步的效果是相同的,能实现相位差的补偿;但是如果相位差的绝对值比重同步跳转宽度大,由于补偿的最大值是重同步跳转宽度,致使重同步不能完全补偿相位差。

CAN协议的位填充机制除实现仲裁场,控制场,数据场和CRC序列的数据的透明性外,还增加了从“隐性位”到“显性位”跳变的机会,也就是增多重同步的数量,提高同步质量。在没有出错影响的情况下,位填充原则保证了两次重同步跳转边沿之间不会多于10个位周期(即5个显性位,5个隐性位),而实际的系统会有错误发生,使得实际的两次重同步跳转边沿之间的间隔可能为17到23个位时间(活动错误标志及其叠加6到12个位时间,错误界定符8个位时间,间歇场3个位时间)。
3、结论
在实际的系统设计中,用户可以根据振荡器时钟频率,总线波特率以及总线的最大传输距离等因素,对CAN控制器的位定时参数进行优化设置,协调影响位定时设置的两个主要因素:振荡器容差和最大总线长度,合理安排位周期中采样点的位置和采样次数,保证总线上位流的有效同步的同时,优化系统的通讯性能,进一步推进CAN总线的广泛应用。
-
CAN总线
+关注
关注
145文章
1942浏览量
130712
发布评论请先 登录
相关推荐







 工商网监
工商网监
评论