 激光雷达与雷达:详细对比
激光雷达与雷达:详细对比
我最近谈到雷达和激光雷达之间的差异。我给出了有关雷达的通用答案,其分辨率和准确度均高于雷达。雷达具有更长的射程和更好的灰尘和烟雾条件。
当提示为什么雷达不太准确和较低的分辨率时,我被问到为什么。我有点嘟through了一下关于波长的回应;然而我没有很好的回应,所以这篇文章将是我更好的回应。
LIDAR
LIDAR是光检测和测距的简称,它使用激光器发射并接收回传感器。在大多数用于测绘(和自行驾驶车辆)的LIDAR传感器中,计算发射和接收之间的时间以确定飞行时间(ToF)。知道波浪返回的光速和(1/2的时间)(因为信号传出和返回),我们可以计算出物体离光线有多远的距离,从而使光线反射回来。该值是传感器报告的范围信息。LIDAR通常使用近红外光,可见光(但不是真正可见的)和紫外光谱。
有一些传感器使用三角测量来计算位置(而不是ToF)。这些通常是高精度,高分辨率的传感器。这些传感器非常适合验证装配线上的组件或检查航天飞机上的热瓦损坏。但是,这不是这篇文章的重点。
LIDAR数据。顶部显示反射率数据。底部显示距离数据的亮点越远。[来源]
激光束也可以聚焦成具有很小的光斑尺寸,不会扩大很多。这个小光斑大小可以帮助提供高分辨率。如果您有旋转镜(通常是这种情况),那么您可以在每度左右(基于指向机制的精确度)拍摄激光,以提高分辨率。LIDAR在0.25度角分辨率下工作并不罕见。
雷达
雷达是无线电探测和测距的缩写,它使用无线电波来计算速度和/或距离。无线电波与物体接触时的光波吸收较少(衰减较小),所以它们可以在较长的距离上工作。正如您在下面的图片中看到的那样,RF波的波长比激光雷达波大。不利的一面是,如果一个物体比正在使用的RF波小得多,物体可能不能反射足够的能量来检测。出于这个原因,许多雷达用于障碍探测将是“高频”,因此波长更短(因此我们为什么经常在机器人中使用毫米波),并可以探测到较小的物体。然而,由于激光雷达的波长明显较小,它们通常仍然具有更好的分辨率。
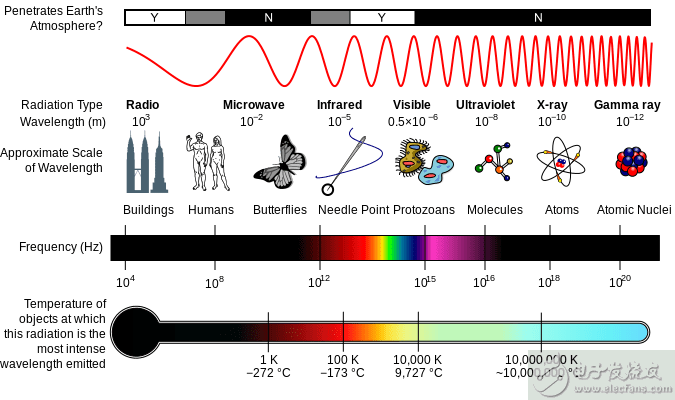
电磁频谱在雷达左侧一直显示无线电波,LIDAR的右侧显示近红外/可见/紫外波。
资料来源:美国国家航空航天局的Inductiveload [GFDL(http://www.gnu.org/copyleft/fdl.html),通过维基共享资源
我所见过的大多数RADAR的视野都很窄(10度),然后只返回一个值(或者它们可能有几十个通道,参见下面的多模雷达),其范围为检测到的物体。一些系统可以使用多个通道来获取距离测量的角度。角度不会像大多数LIDAR那样高。市场上还有一些雷达用于扫描以获得多种测量结果。这两种方法是一种旋转天线(例如您在机场或船上看到的)或电子“旋转”,这是一种使用多个内部天线而没有移动部件的设备。更高级的(更新的)RADAR可以完成跟踪多个对象的任务。在很多情况下,它们实际上不会返回勾画物体的点(如激光雷达),但会将范围,方位和速度(范围速率)返回到检测到的物品的估计质心。如果多个物体彼此靠近,传感器可能会将它们混淆为一个大物体并返回一个质心范围[这里是阅读的来源和一个很好的参考]。
使用多普勒频移,物体的速度也可以用相对较少的计算量轻松确定。如果RADAR传感器和检测到的物体都在移动,那么您将获得两个物体之间的相对速度。
![[资源]](http://file.elecfans.com/web1/M00/50/3E/pIYBAFrwQVmAd9jGAAFHLebpPxw888.png)
[来源]
使用雷达时,通常有两种操作模式:
1.飞行时间- 这与上述LIDAR传感器类似,然而它使用无线电波脉冲进行飞行时间计算。由于传感器是脉冲式的,所以知道脉冲何时被发送,因此计算范围可以比连续波传感器更容易(如下所述)。传感器的分辨率可以通过改变脉冲宽度和听取响应的时间长度(回击)来调整。这些传感器通常具有固定的天线,导致视野小(与LIDAR相比)。
有一些系统将多个ToF无线电波合并成一个具有不同脉冲宽度的封装。这将允许以更高的准确度检测各种范围。这些有时称为多模雷达
2.连续波- 这种方法频率调制(FMCW)波,然后将反射信号的频率与发射信号进行比较以确定频移。该频移可以用来确定反射它的物体的范围。物体离传感器越远(在一定范围内)越大。计算频移和相应的范围在计算上比ToF更容易,再加上电子设备更容易,更便宜。这使得连续调频系统非常流行。另外,由于经常使用单独的发射和接收天线,所以这种方法可以连续地同时发射和接收;不同于需要传输的脉冲ToF方法,然后等待响应。
还有另一种版本的连续波雷达,其波形没有被调制。这些系统价格便宜,可以利用多普勒效应快速检测速度,但它们无法确定范围。在范围不重要的情况下,他们经常被警察用来检测车速[维基百科]。
SONAR
不相关,但是当我们查看上面的频谱时,我应该注意到声纳或声音导航和测距可以在两种模式下工作,如雷达。所用的波长比RADAR更大。它在前面显示的光谱图像的左侧偏离图表。
我应该指出,有很酷的成像声纳传感器。总的想法是,您可以使感测波垂直,使水平分辨率非常精细(<1度),垂直分辨率更大(10+度)。然后,您可以将这些光束中的许多相互靠近放置在传感器封装中。有类似的软件包可以用小波长的雷达来实现这一点。
成本
$$$
由于以下几个原因,LIDAR传感器比RADAR传感器成本更高:
1.使用ToF的LIDAR需要高成本的电子设备,成本更高
2. LIDAR传感器需要CCD接收器,光学器件,电机和激光器来产生和接收所使用的波。雷达只需要一些固定天线。
3. LIDAR传感器具有旋转部件进行扫描。这需要电机和编码器。雷达只需要一些固定天线。(我知道这有些类似于上面的行)。
计算地说话
由于RADAR传感器只返回一个点或几十个点,因此往往会产生更少的数据。当传感器是多通道时,它通常只是将范围/速度返回到几个质心(ish)物体。激光雷达传感器正在发送大量有关距离数据的每个激光点的数据。然后由用户决定是否有用。使用RADAR你有一个简单的号码,但这个号码可能不是最好的。利用LIDAR,它取决于机器人技术人员生成算法来检测各种物体并辨别传感器正在查看的内容。
如果你的目标是在你面前探测一辆汽车(或朝你驾驶)并获得它的速度,雷达可能会很棒。如果您试图确定物品的准确位置,生成表面贴图或找到小型栅栏,LIDAR可能会做得更好。请记住,如果您在灰尘或雨中,激光雷达可能会在传感器附近返回一点点云(因为它会读取所有这些粒子/滴)。而雷达可能会做得更好。
-
激光雷达
+关注
关注
969文章
4057浏览量
190842 -
LIDAR
+关注
关注
10文章
328浏览量
29735
发布评论请先 登录
相关推荐
CES 2025激光雷达观察:“千线”激光雷达亮相,头部厂商布局具身智能


一则消息引爆激光雷达行业!特斯拉竟然在自研激光雷达?
激光雷达,明年要降价至200美元

激光雷达会伤害眼睛吗?

激光雷达的维护与故障排查技巧
激光雷达技术的基于深度学习的进步
激光雷达在农业中的创新应用
激光雷达技术的发展趋势
光学雷达和激光雷达的区别是什么
一文看懂激光雷达

基于FPGA的激光雷达控制板

硅基片上激光雷达的测距原理

激光雷达的探测技术介绍 机载激光雷达发展历程






 工商网监
工商网监
评论