 智能车舵机控制算法详解
智能车舵机控制算法详解
舵机的原理和控制
控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。
舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms-2.5ms范围内的角度控制脉冲部分,总间隔为2ms。以180度角度伺服为例,那么对应的控制关系是这样的:
0.5ms--------------0度;
1.0ms------------45度;
1.5ms------------90度;
2.0ms-----------135度;
2.5ms-----------180度;
舵机的追随特性:
假设现在舵机稳定在A点,这时候CPU发出一个PWM信号,舵机全速由A点转向B点,在这个过程中需要一段时间,舵机才能运动到B点。
保持时间为Tw
当Tw≥△T时,舵机能够到达目标,并有剩余时间;
当Tw≤△T时,舵机不能到达目标;
理论上:当Tw=△T时,系统最连贯,而且舵机运动的最快。
实际过程中w不尽相同,连贯运动时的极限△T比较难以计算出来。
假如我们的舵机1DIV =8us,当PWM信号以最小变化量即(1DIV=8us)依次变化时,舵机的分辨率最高,但是速度会减慢。

智能车舵机控制算法详解
舵机:小车转向的控制机构。也就是控制小车的转向。它的特点是结构紧凑、易安装调试、控制简单、大扭力、成本较低等。舵机的主要性能取决于最大力矩和工作速度(一般是以秒/60°为单位)。它是一种位置伺服的驱动器,适用于那些需要角度不断变化并能够保持的控制系统。在机器人的控制系统中,舵机控制效果是性能的重要影响因素。舵机能够在微机电系统和航模中作为基本的输出执行机构,其简单的控制和输出值得单片机系统很容易与之接口。
组成:舵盘、减速齿轮组、位置反馈电位计、直流电机、控制电路等
工作原理:控制信号→控制电路板→电机转动→齿轮组减速→舵盘转动→位置反馈电位计→控制电路板反馈。
输入线:中间红色——电源线Vcc;黑色——地线GND;白色/橘黄色——控制信号线
信号:pwm信号,其中脉冲宽度从0.5-2.5ms(周期为20ms),相对应的舵盘位置为0-180度,呈线性变化。

pwm波脉冲宽度与舵机转角角度的关系:

也就是不同脉冲宽度的pwm波,舵机将输出不同的轴转角。所以要控制小车的转角,我们就要控制输出不同脉冲宽度的pwm波。
PWM:脉冲宽度调制
原理:对电路元件的通断进行控制,使输出端得到一系列幅值相等的脉冲。猪八戒的耙子就可以看似脉冲宽度相等的pwm波形。那不相等的呢,可以 把一排身高相等但胖瘦不同的人排排站看做脉冲宽度不相等的pwm波形。比如这里有一个简单的电路:

我们以5s为一个周期,在每一个5s内,前3s开关打开,后2s开关闭合,则ab端电压将会这样变化:

对电路元件的通断进行控制,使输出端得到一系列幅值相等的脉冲。
在这个例子中,输入信号脉冲宽度为3s,周期为5s。
重复一下:所以要控制小车的转角,我们就要控制输出不同脉冲宽度的pwm波。
PID控制:一种调节器控制规律为比例、积分、微分的控制。其中:P:比例(proportion)、I:积分(integral)、D:导数(derivative)

式子中Kp为比例系数,Ti为积分时间参数,Td为微分时间常数。
各个参数的意义作用:
Kp:比例系数。一般增大比例系数,将加快系统的响应。
Ti:积分时间常数。一般地,积分控制通常与比例控制或比例微分控制联合使用,构成 PI或 PID控制.增大积分时间常数 (积分变弱)有利于小超调,减小振荡,使系统更稳定,但同时要延长系统消除静差的时间.积分时间常数太小会降低系统的稳定性,增大系统的振荡次数.
Td:微分时间常数。一般微分控制和比例控制和比例积分控制联合使用,组成PD或PID控制,微分控制可改善系统的动态特性。
PID的控制方法常用的有两种:
1.增量式PID
所谓的增量,就是本次控制量和上次控制量的差值。增量式PID是一种对控制量的增量进行PID控制的一种控制算法。

(说明:Kp-》P,Ki-》I,Kd-》D,e数组-》error数组,
e[n]-》本次差值,e[n-1]-》上次差值,e[n-2]-》上上次差值)
举个例子,增量式PID可以应用在电机上。
假设当前电机PID的pwm值为5000(精度为10000,即此时的占空比为50%)。对应的速度为100r/s。
程序发出一个命令,要求pwm输出为0,即要求停车。(可能有人有疑问为什么不直接程序给pwm为0,这也是一种方法,可是由于惯性的存在,小车会在一段时间后才停下。)
这时,我们可以采用PID控制的方法来实现。
我们在程序中定义几个变量:
根据公式,我们编写程序:
void PID()
{
/*
增量式PID
P=Kp*(error-error_pre);
D=Kd*(error-2*error_pre+error_pre_pre);
I=Ki*error;
Pwm+=P+I+D;
*/
error=speed_want-speed_now; //speed_now可以通过编码器采值等等方式得到
pwm_duty+=(int)(P*(error-error_pre)+I*error+D*(error-2*error_pre+error_pre_pre));
//注意上面的加号,加号是增量式PID的体现。我们对增量(即右边的式子)进行PID控制。
error_pre_pre=error_pre;
error_pre=error;
}
当函数运行第一次的时候,输出的pwm为:

电机给了一个反转的力,小车前进受到了阻力,于是可以很快的停下来了。
2、位置式PID
与增量式不同,位置式PID不需要对控制量进行记忆,直接对偏差值进行计算得出期望的pwm。公式:

(说明:Kp-》P,Ki-》I,Kd-》D,ek-》本次误差、ek-1-》上次误差)
举个例子,位置式PID可以应用在舵机上。因为舵机本次的pwm输出值与上次pwm输出值关系不太,舵机需要的是快速转到某个角度。
假设舵机pwm输出1000时舵盘转轴为90°,pwm输出0时舵盘转轴为0°,pwm输出2000时舵盘转轴为180°。
现在舵机pwm输出为1500,我们要让舵盘转到最中间。
在这里我们采用PD控制,即I值为0(I值为偏差的积分,即对偏差求和。我们当时试验小车的舵机控制时发现I值可以省略,PD控制足矣。当然,具体需不需要I项要在实际中进行分析验证)。
代码:
pwm_duty=(int)(P*error+D*(error-error_pre); //红色部分表示这是位置式PID控制
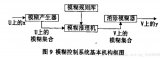
反馈系统:

-
控制
+关注
关注
4文章
1011浏览量
122655 -
PID
+关注
关注
35文章
1472浏览量
85449 -
舵机
+关注
关注
17文章
267浏览量
41007
发布评论请先 登录
相关推荐
labview智能车参考程序(fuzzy 控制)
基于光电管路径识别的智能车系统设计
电磁循迹智能车是由哪些模块组成的
双舵机模糊控制在智能车控制中的应用介绍
基于路径识别的智能车系统设计
基于光电管路径识别的智能车系统设计







 工商网监
工商网监
评论