 三个方面讲智能车辆对对ADAS的需求
三个方面讲智能车辆对对ADAS的需求
本文首先从车企竞争、安全政策、成本降低三个方面讲了智能车辆对对ADAS的需求,ADAS的特殊开发环境,以及ADAS的控制策略开发,包括车辆建模、ADAS系统结构及参数、ADAS 控制算法开发、ADAS HIL测试系统。
智能车辆是一个集环境测量和感知、车辆定位和姿态判断、局部路径和算法、联网和数据交互、规划决策与多等级辅助驾驶等功能于一体的综合车辆控制系统,它集中运用了车辆技术、计算机、现代传感、信息融合、通讯、人工智能及自动控制等技术。智能车辆己经成为世界车辆工程领域研究的热点和汽车工业增长的新动力,美国、日本和欧洲都将其纳入到各自重点发展的智能交通系统中。
第一部分 影响智能车辆发展的因素
ADAS
a)车企的竞争需求:汽车上的功能特色,从早期电动车窗到当今最新的高级辅助驾驶系统(ADAS)系统,豪华汽车所具有的高端特性和功能随着时间的推移最终都应用到中端和经济型汽车上。欧洲的福特福克斯汽车现在具备了自适应巡航控制(ACC)、自动刹车和主动式车道保持等功能,起亚汽车也安装了后视摄像机。
b)安全政策的需求:随着政府对于道路安全的管理需求,政府的道路安全规章制度和评分系统的变革也是一个重要因素。欧洲汽车评估机构“Euro NCAP”将从2016年开始将行人检测系统和减轻行人伤害的制动器列为评估对象。届时将对行人检测、自动制动等一系列动作进行测试。美国国家高速运输安全管理局正在制定强制安装后视摄像机的政策,推进车车间通信的框架。
c)成本的降低和优惠措施:安装了ADAS的车辆在保险上有折扣也是推动ADAS广泛应用的另一因素。 ADAS在汽车上广泛应用的决定性因素还是成本,其技术的复杂性,随着传感器和处理器技术的进步(很少器件中集成多种功能),使得现在经济型汽车也能承受某些ADAS功能的应用。
智能汽车的开发环境
汽车的开发环境,主要有基于场景的模型和对于智能汽车控制实验两部分组成,前者主要是通过各种场景的抽象,形成程序环境;后者主要进行研究、标定和认证的实验,包括实验场地、实验设备,测速环境等。
ADAS系统的功能与应用特性不同于常规汽车电子控制系统,ADAS具有自身的特点:
1)ADAS的应用场景一般为人、车、路构成的闭环系统,三者缺一不可
2)ADAS与自身车辆性能以及道路的特性、驾驶员的安全行为直接相关
3)ADAS系统通常需与多个车载控制系统协作,是一种分布式控制系统
车辆纵向控制需求
ADAS系统的开发具有特殊性,要遵从一般ECU的V模式开发流程(工具和基于模型的设计方法首先对电池管理控制系统进行了设计、仿真和验证,然后为其生成了产品代码),由于ADAS系统的实时性非常重要,需要实时与不同类型的传感器进行数据交换(比如摄像头、激光雷达、雷达、车辆CAN总线、GPS等),而且需要方便的集成新的功能和算法。ADAS系统的软件开发需要解决很多挑战,比如多线程编程、数据样本时戳和再同步、数据延时测量和预估,系统优化和性能评估、代码重用和软件应用维护等,一般一开始就需要考虑虚拟化半实物仿真测试方案。
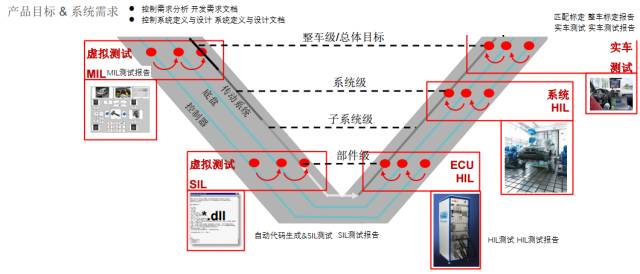
ADAS细分成不同的功能,但是目前其测试环境和解决方案贯穿于前期的MBD建模和算法开发,到发布ECU代码,ECU样件测试完毕,连接到子系统和传感器,装到样车上,以及形成整车,共用一个测试平台。从MIL,SIL到EIL,HIL,VIL各个阶段都用一个测试平台,通过软件将虚拟化场景复现出来,测试ADAS的各种功能。包含车辆模型,交通环境模式,驾驶员模型,传感器模型,环境模型。根据不同测试对象,选择的不同传感器,获取环境中不同的信息。把传感器获得的信息给到算法或者ECU,算法或ECU再反过来控制环境中的整车,形成闭环的测试环境。如果在早期算法开始就进行测试,到后期随着开发的深入,测试项会发生变化,如果从早期就投入使用测试方案,后期会越来越简单。
MBD的开发过程(编者自行整理)
第二部分 控制策略开发过程
ADAS的控制策略开发
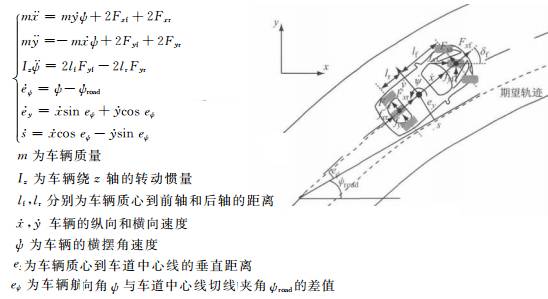
全系统仿真建模:车辆系统动力学主要研究车辆行驶过程中受到的各种力的相互作用、由此产生的对车辆运动的影响以及车辆内部各系统之间的相互影响。
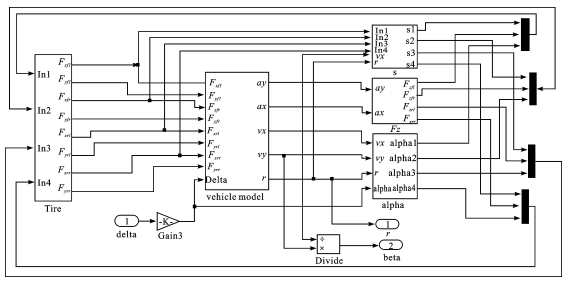
车辆建模
包含轮胎模型和车辆模型。前者是基于试验数据的半经验轮胎模型,它对轮胎的纵向力、横向力和回正力矩的拟合性较好;后者往往需要做一些假设,如车辆坐标系原点与汽车质心重合;汽车仅作沿 x轴的纵向运动、沿y轴的横向运动和绕 z轴的横摆运动;各轮胎机械特性相同。
传统的基于车辆简化模型(编者自行整理)
现在越来越多的开始在软件(Cruise仿真软件, AMESim仿真软件)中构建该车型的仿真模型,包括车辆内外造型,动力学参数等。AMESim可以对车辆模型结合有传统制动系统、ABS和ESP系统的液压、气动元部件以及控制方案进行建模与仿真分析,得到更为细致的结果。
车辆模型在软件中进一步细化(AMESim 建模参考)
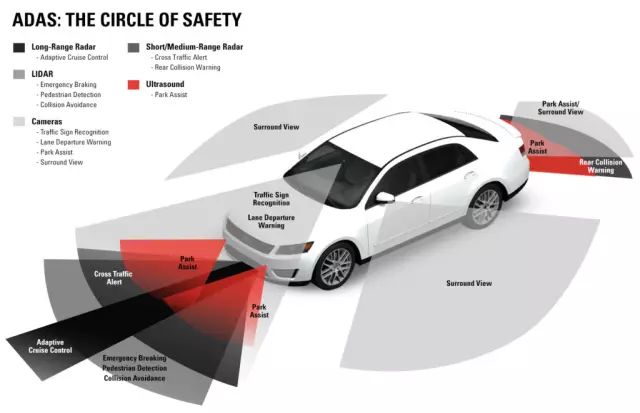
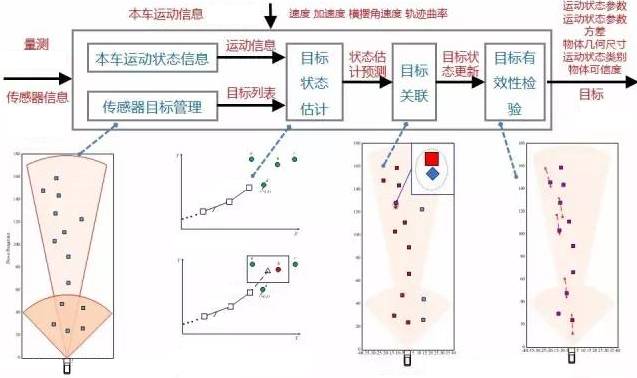
ADAS系统结构及参数:使用一套传感器装置,选用 1 个单目摄像头和雷达的参数选型。根据这些传感器开发多目标跟踪算法,目的是计算出有效目标的距离、速度及角度,需要进一步细化运动状态的参数及方差、几何尺寸、运动状态类别、物体特征类别概率等,且还包括传感器的信息及交通环境的信息。结合传感器量测信息,基于本车的运动信息和传感器的目标管理,从而进行雷达目标状态的估计,然后对于每个目标进行数据关联,从而关联成一个有效的物体,然后再对物体的有效性进行校验,得到目标的运动状态及运动状态参数偏差、几何尺寸、物体可信度等。对物体的运动状态进行分类(物体是运动的、静止的、开始运动再开始静止)。
ADAS 控制算法开发:以自适应巡航为例,包括定速续航控制、弯道巡航控制和跟随控制。前者控制单元按照驾驶员设定的巡航速度控制车辆匀速行驶;后者则使主车车速降到理想目标值后,保持相对距离地跟随前方目标车辆行驶。三个控制系统同时计算,然后基于车辆的行驶工况,理想控制输出进行选择。在实际中需要考虑汽车本身动力学及运动学特性的,是否上下坡工况,在不同速度段的驱动能力等等,对理想控制输出进行限制。
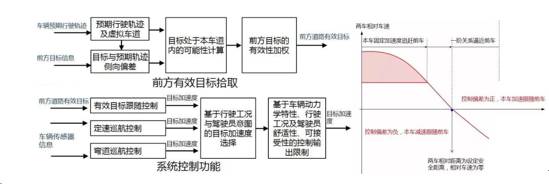
ACC前面目标和系统功能简图(图片来源:微讲座《77GHZ毫米波了大的开发难度》)
具体实现是分模块实现之后在Simulink里面细化,在定速模块内做PID控制策略;
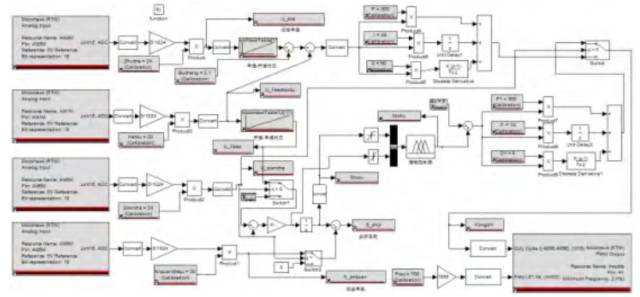
ACC 算法 Simulink实现(编者自行整理)
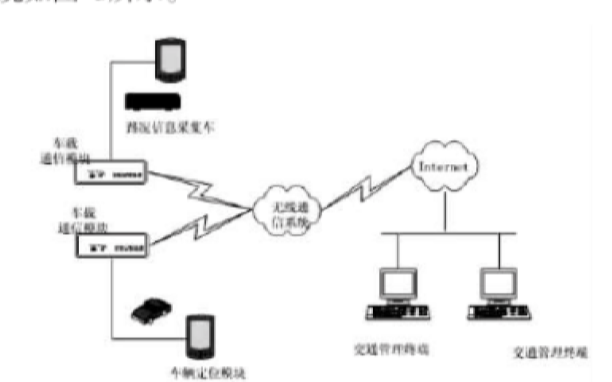
ADAS HIL测试系统:不少汽车OEM公司,都采取完整的“虚拟车辆”测试平台并以此完成了ADAS仿真测试。通过待测试车型仿真模型的实时运行,可实现对车辆各种运行状态和各类复杂工况的模拟,并完成对整车电子电气系统的手动测试和自动化测试。
-
汽车工业
+关注
关注
2文章
113浏览量
29848 -
adas
+关注
关注
309文章
2161浏览量
208467 -
智能车辆
+关注
关注
0文章
17浏览量
19238
原文标题:ADAS系统控制策略的开发与测试
文章出处:【微信号:IV_Technology,微信公众号:智车科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
智能车模型(E题)
汽车一直在科技——智能车辆警示牌、AI、机器人...
超高频RFID智能车辆管理系统的工作原理是什么?
怎么实现移动智能车辆稽查系统的设计?
怎么实现基于C8051F121在智能车辆检测器中的设计?
世界智能车辆行驶安全保障技术的研究进展
基于RFID的智能车辆管理系统
ADAS纳入安全法规,智能车相关应用技术已臻成熟

从新增、退出、需求三个方面来拆解PCB行业未来的供需格局

世界智能车辆的关键共性技术研究现状






 工商网监
工商网监
评论