 自动驾驶的关键技术就靠它们了
自动驾驶的关键技术就靠它们了
激光雷达和与之竞争的传感器技术(相机、雷达和超声波)加强了对传感器融合的需要,也对认真谨慎地选择光电探测器、光源和MEMS振镜提出了更高的要求。
传感器技术、成像、雷达、光探测技术及测距技术(激光雷达)、电子技术和人工智能的进步,使数十种先进的驾驶员辅助系统(ADAS)得以实现,包括防撞、盲点监测、车道偏离预警和停车辅助等。通过传感器融合实现这些系统的同步运行,可以让完全自动驾驶的车辆监视周围环境,并警告驾驶员潜在的道路危险,甚至采取独立于驾驶员的躲避行动以防止碰撞。
自动驾驶汽车还必须在高速状态下区分和识别前方的物体。通过测距技术,这些自动驾驶汽车必须快速构建一张约100m距离内的三维(3D)地图,并在高达250m距离范围内创建高角分辨率的图像。如果驾驶员不在场,车辆的人工智能必须做出最佳决策。
完成这一任务的几种基本方法之一,就是测量能量脉冲从自动驾驶车辆到目标再返回车辆的往返飞行时间(ToF)。当知道“脉冲”通过空气的速度时,就可以计算到反射点的距离——脉冲可以是超声波(声纳)、无线电波(雷达)或光(激光雷达)。
在这三种ToF技术中,激光雷达是提供更高角度分辨率图像的最佳选择,因为它具有更小的衍射特性和光束发散度,可以比微波雷达更好地识别相邻物体。这种高角度分辨率在高速下尤为重要,可以提供足够的时间来应对潜在的危险,如迎面碰撞。
#激光光源的选择
在ToF激光雷达中,激光发射持续时间为τ的脉冲,在发射瞬间触发定时电路中的内部时钟(下文有图示)。从目标反射的光脉冲到达光电探测器,转换产生电信号输出使时钟停止计时。这种测量往返ToF Δt时间的方式可以计算到反射点的距离R。
如果激光和光电探测器实际上位于同一位置,则距离由下公式确定:
中c是真空中光速,n是传播介质的折射率(对空气来说大约为1),影响距离分辨率ΔR的因素有两个:测量Δt时的不确定度δΔt和脉冲宽度的导致的空间误差w(w = cτ)。
以第一个因素代表测距分辨率ΔR=1/2 cδΔτ,而以第二个代表测距分辨率ΔR=1/2 w = 1/2 cτ。如果以5cm的分辨率测量距离,上述关系式分别意味着δΔt大约为300ps,τ大约为300ps。
飞行时间激光雷达要求光电探测器和其后的电子学系统具有很小的时间抖动(δΔτ的主要贡献因素)以及能够发射短脉宽时间的脉冲激光器,例如相对昂贵的皮秒激光器。目前典型的汽车激光雷达系统中的激光器产生约4ns持续时间的脉冲,所以减小光束发散是必要的。
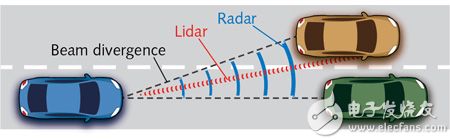
光束发散取决于波长和发射天线尺寸(微波雷达)或透镜孔径大小(激光雷达)的比值。微波雷达这一比值较大,因此发散度更大,角度分辨率较低。图中微波雷达(黑色)将无法区分这两辆车,而激光雷达(红色)可以。
对汽车激光雷达系统设计者来说,最关键的选择之一是光波长。制约这一选择的因素有几个:
· 对人类视觉的安全性
· 在大气中的传播特性
· 激光的可用性和光电探测器的可用性
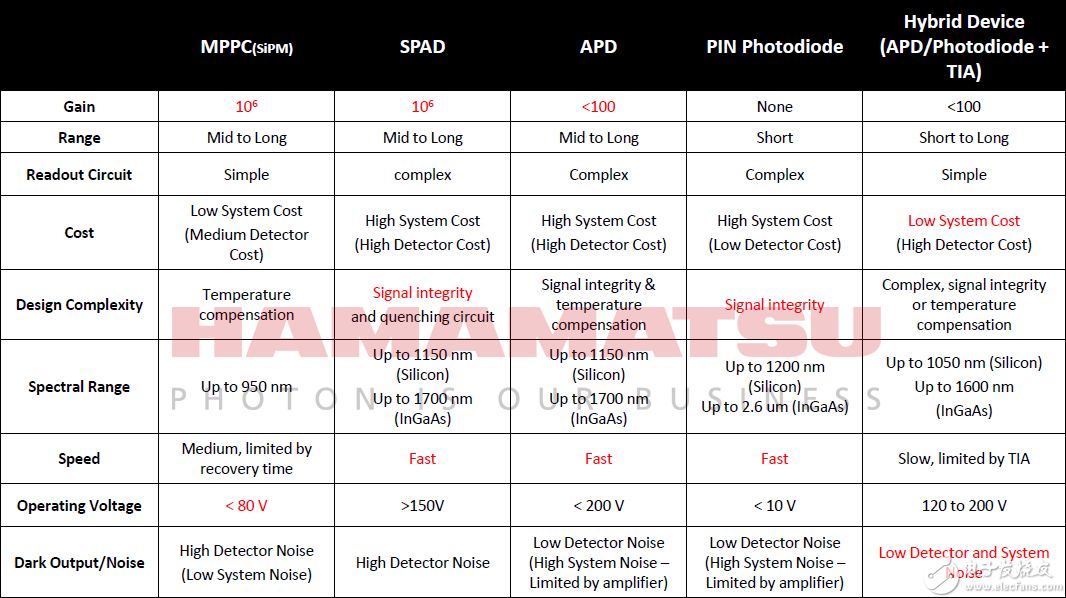
两种最流行的波长是905和1550 nm,905nm的主要优点是硅在该波长处吸收光子,而硅基光电探测器通常比探测1550 nm光所需的铟镓砷(InGaAs)近红外探测器便宜。
可用于自动驾驶激光雷达的滨松近红外MPPC(硅光电倍增管),在905nm处具有较高的探测效率,响应速度快,工作温度范围宽,适合各种场合下的激光雷达应用,尤其是使用TOF测距法的长距离测量。
然而,1550nm的人类视觉安全度更高,可以使用单脉冲更大辐射能量的激光——这是光波长选择的一个重要因素。
1550nm探测器 滨松InGaAs APD G8931
大气衰减(在所有天气条件下)、空气中粒子的散射以及目标表面的反射率都与波长有关。由于有各种各样可能的天气条件和反射表面,对于这些条件下汽车激光雷达波长的选择来说是一个复杂的问题。在大多数实际情况下,905 nm处的光损失更小,因为在1550 nm处的水分的吸收率比905 nm处要大。
#光探测器的选择
只有一小部分脉冲发射的光子可以到达光电探测器的有效区域。如果大气衰减沿脉冲路径不变化,激光光束发散度可忽略不计,光斑尺寸小于目标,入射角垂直于探测器且反射体是朗伯体(所有方向均反射),则光接收峰值功率P(R)为:
P0是发射激光脉冲的光峰值功率,ρ是目标的反射率,A0是接收器孔径面积,η0是光学系统透过率,γ是大气消光系数。
该方程表明,随着距离R的增加,接收功率迅速减小。为了合理选择参数,R=100 m,探测器的活动区域上返回光子的数量大约是几百到几千,而通常发射的光子超过1012。这些回波光子与背景光子同时被探测,而背景光子没有任何有用信息。
采用窄带滤波器可以减少到达探测器的背景光,但不能减少到零,背景光的影响使检测动态范围减小,噪声(背景光子拍摄噪声)增大。值得注意的是,典型条件下地面太阳辐照度在1550 nm处小于905 nm。
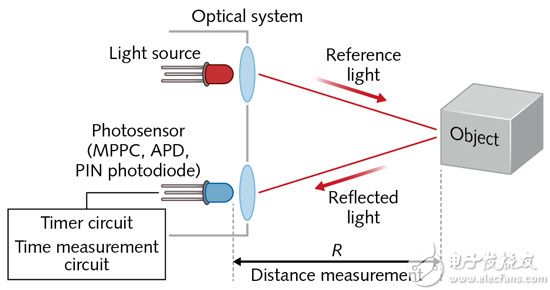
飞行时间(ToF)激光雷达的基本原理示意
在一辆汽车周围360°×20°的区域内创建一张完整的3D地图需要一束经过光栅分光后进行扫描,或多束激光束扫描,再或者将光束整个覆盖住需要的范围并收集返回的点云数据。前者被称为扫描(scanning)激光雷达,后者称为闪光(flash)激光雷达。
采用窄带滤波器可以减少到达探测器的背景光,但不能减少到零,背景光的影响使检测动态范围减小,噪声(背景光子拍摄噪声)增大。值得注意的是,典型条件下地面太阳辐照度在1550 nm处小于905 nm。
扫描激光雷达有几种方式。第一种方式,以Velodyne为例(San Jose, CA),在顶部安装激光雷达平台,该雷达以300~900 rpm的速度旋转并发射出64路905 nm激光的脉冲。每束光束都有一个对应的雪崩光电二极管(APD)探测器。较类似的另一方法是使用旋转的多面镜,每个面的倾斜角度略有不同,从而以不同的方位角和斜角引导反射单个脉冲光束。这两种设计中的机械运动部件都有外部驾驶环境恶劣时的故障风险。
滨松新型百米级自动驾驶激光雷达探测器 16ch 硅APD S14137-01CR
第二种更紧凑的扫描激光雷达,其方法是使用一个微型微机电系统(MEMS)振镜,以二维的方向电引导出一束或多束光束。虽然在技术上仍然有运动部件(振荡镜),但振荡的幅度很小,频率也很高,足以防止MEMS振镜和汽车之间的机械共振。然而,振镜的几何尺寸限制了它的振荡幅度,这就使得视角变得有限——这是MEMS方法的一个缺点。然而,这种方法由于成本低、可实现度高而受到人们的关注。
滨松最新MEMS Mirror产品 刚刚在慕尼黑上海光博会中展出
光学相控阵列(OPA)技术,是第三种参与竞争的激光雷达技术,它以可靠的“固定部件”设计而日益流行。它由相干光照明的光学天线组成的阵列构成。光束转向是通过独立地控制每个单元发光时的相位和振幅来实现,从而于远场处干涉产生理想照明方向,实现从单光束到多光束的变化。不幸的是,光的损失限制了各种OPA组件的可用范围。
闪光激光雷达将目标场景中充满光,而照明区域与探测器的视场相匹配。探测器是探测光学焦平面上的APDs阵列。每个APD独立测量其上图像目标特征的ToF。这是一种真正的“不移动部件”的方法,其中切线方向(垂直、水平)分辨率受到二维探测器像素尺寸的限制。
然而,闪光激光雷达的主要缺点是回波光子数量:一旦距离超过数十米,返回光的数量就太少,无法进行可靠的探测。如果不是直接用光覆盖所有探测环境而是采用结构光的形式(例如点阵形式),且牺牲一定的切线分辨率,则可以提高回波光强度。此外,垂直腔面发射激光器(VCSELs)使得在不同方向同时发射数千束光束的出射成为可能。
# 摆脱ToF法的限制
ToF激光雷达由于其回波脉冲较弱、探测部分电子学设计的宽带较宽而容易受到噪声的影响,而阈值触发则会产生Δt的测量误差。因此,调频连续波(FMCW)激光雷达是一种很有意义的替代方法。
在FMCW雷达或啁啾调制雷达中,天线连续发射频率被调制的无线电波。例如,随着时间T从ƒ0线性增加到ƒmax,然后随着T从ƒmax线性减小至ƒ0。如果波在一定距离内的移动物体上反射回发射点,其瞬时频率将与该瞬间发射的无线电波不同。这一差别由两个因素导致:到物体的距离及其相对径向速度。可以通过电子测量方法得到频差,同时计算物体的距离和速度(见下图)。
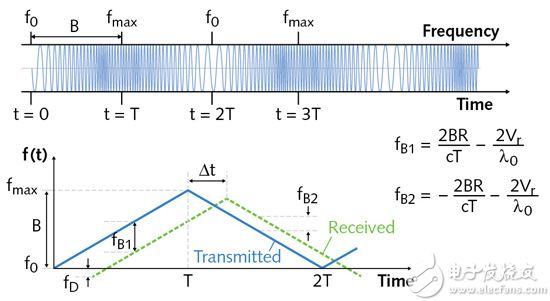
在啁啾雷达中,通过电子测量fB1和fB2,可以确定与反射目标的距离及其径向速度。
在啁啾雷达的启发下,FMCW激光雷达可以通过不同的方式获得。在最简单的设计中,人们可以啁啾地调节照亮目标的光强。这个频率受FMCW雷达载波频率的相同规律(例如多普勒效应)的影响,返回的光被光探测器探测到并恢复调制频率,输出被放大并与本身振荡频率混频从而允许测量频移,并由此计算出目标的距离及其速度。
但是FMCW激光雷达有一定的局限性,与ToF激光雷达相比,它需要更多的计算能力,因此在生成全三维环绕图时速度较慢,而且测量精度对啁啾时调制时的线性度程度非常敏感。
虽然设计一种功能完善的激光雷达系统具有挑战性,但这些挑战都不是不可克服的。随着研究的继续,我们越来越接近于大多数汽车生产结束后就能够完全自动化的时代。
参考文献
1.J. Wojtanowski et al., Opto-Electron. Rev., 22, 3, 183-190 (2014).
作者 / 美国滨松研究科学家:Slawomir Piatek 美国滨松营销工程师:Jake Li
原文链接:LIDAR: A photonics guide to the autonomous vehicle market
-
激光雷达
+关注
关注
968文章
3981浏览量
190003 -
自动驾驶
+关注
关注
784文章
13836浏览量
166522
发布评论请先 登录
相关推荐
【话题】特斯拉首起自动驾驶致命车祸,自动驾驶的冬天来了?
自动驾驶真的会来吗?
自动驾驶的到来
留给特斯拉的时间不多了 通用自动驾驶版Bolt实现量产技术生产
迈向自动驾驶和电动汽车之路研讨会
自动驾驶安全保驾护航的三个关键技术
如何让自动驾驶更加安全?
联网安全接受度成自动驾驶的关键
自动驾驶技术的实现
华为正式表态:拥有自动驾驶和电动汽车关键技术
自动驾驶下半场竞争的关键技术






 工商网监
工商网监
评论