 各类电机位置编码器及接口电磁兼容
各类电机位置编码器及接口电磁兼容
电机位置编码器广泛用于伺服驱动器、机器人、机床、印刷机、纺织机和电梯等工业电机控制应用。用接口把这些编码器连接到您系统的其它部分会带来一些棘手的电磁兼容(EMC)问题。为帮您应对这些挑战,笔者将以各类电机位置编码器及其接口的概述作为本系列的开始,本系列的其余部分将深入探讨如何为每种不同的电机位置编码器类型设计符合EMC标准的工业接口。
所需的位置/角度分辨率可根据工业驱动器的应用而变化,从几位到25位或超过25位。一些驱动器应用甚至需要角转动度数。从变频器到位置编码器的安装距离会有所不同,从很短的几米(在多轴驱动器中)到100米或100米以上。由于那种长距离,电接口需经过设计,以实现对电磁场、共模电压、脉冲噪声等具有高抗扰性的稳健数据传输。
图1展示了几类适合工业应用的线性或角度位置反馈编码器。
图1:位置反馈编码器及其对应接口
有两种类型的位置编码器:增量型位置编码器和绝对型位置编码器。增量型编码器可提供关于增量位置或角度变化的信息。上电后它们不提供绝对位置,但仍然有可能在一次机械旋转之后通过索引信号获得。绝对型编码器则可始终提供绝对机械位置。
增量型编码器可显示三种差分信号:A信号、B信号和Z信号。A信号和B信号可为增量位置变化编码。位置分辨率取决于增量型编码器的线数。典型的线数范围是每转50至10000线。Z信号通常每转会出现一次,是用来推导出绝对位置的“原点索引(home index)”。
增量型编码器接口是具有晶体管-晶体管逻辑(TTL)或高阈值逻辑(HTL)兼容的数字输出电平的数字脉冲串或具有1Vpp或11μApp振幅的模拟正弦/余弦输出。具有模拟输出的编码器通常被称为正弦/余弦编码器,这类编码器允许的分辨率比具有TTL/HTL输出的编码器允许的分辨率高得多,因为您可通过使用具有所测正弦和余弦信号的反正切函数在一个线数内插入其位置。这种插值能使分辨率增加16位之多,可能的总分辨率是25位或更多。所选编码器的线数乘以旋转速度得出的积与输出信号的频率成比例。
绝对型位置反馈编码器可提供绝对位置(分辨率达25位或25位以上)。它们的电接口已从基于模拟与数字混合协议的串行接口演变成基于纯数字协议的串行接口。串行通信的标准通常是供应商特定的,并能通过双向数据传输来利用RS-485或RS-422差分信号。例如,EnDat 2.2不仅可传输绝对位置,而且还允许从该编码器的内存读出数据或将数据写入该编码器的内存。通过后续电子设备(通常被称为EnDat2.2主站)发送到EnDat2.2编码器的模式命令,您可选择被传输数据的类型 —— 绝对位置、旋转圈数、温度、更多参数、诊断数据。
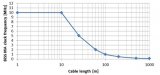
EnDat2.2、BiSS®和HIPERFACEDSL®等基于纯数字串行协议的标准能补偿传播延迟并可在线缆长度达100米的范围内支持通信。纯数字协议具有恒定的时钟频率,该频率不会随旋转速度而变化。对于大多数协议,您可选择时钟频率/波特率以适应外部因素(如线缆长度)。
具有模拟与数字混合型通信接口或纯数字通信接口的编码器通常拥有供应商特定的电源电压范围。表1是广泛使用的编码器标准的概览。
表1:位置编码器接口标准和电源电压
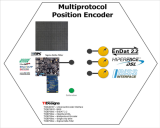
当用接口把这些编码器中的任何一个连接到用于闭环控制的变频器时,该位置接口模块均包含以下功能块,如图2所示:
-
物理模拟或数字接口。
-
符合IEC 61800-3标准的电磁兼容(EMC)。
-
电源。
-
位置解码和/或数字协议主站的信号处理。
图2:工业驱动器/变频器上位置反馈接口模块的简化方框图
具有RS-485或RS-422接口的增量型数字HTL/TTL编码器和绝对型数字编码器需要较少的硬件接口工作,而模拟正弦/余弦编码器则需要具有双路模数转换器的模拟信号链。您需要设计物理接口,以满足EMC抗扰性要求,如对静电放电(ESD)、电快速瞬变(EFT)突发和浪涌的抗扰性要求 —— IEC61800-3规定的相关标准如下:
TTL/HTL编码器需要最少的信号处理工作,只需一个方向正交脉冲计数器。增量型正弦/余弦编码器也需要该正交计数器;此外,还需要进行信号处理,以便为插值计算反正切。基于数字串行接口协议的标准需要较多的信号处理工作,并且通常在现场可编程门阵列(FPGA)上实施,最近则更多地在创新型处理器(如Sitara™ AM437x,它能利用可编程实时单元子系统和工业通信子系统 (PRU-ICSS) 外设)上实施。
-
编码器
+关注
关注
45文章
3701浏览量
135690 -
RS485
+关注
关注
39文章
1173浏览量
82848 -
emc
+关注
关注
170文章
3986浏览量
184353
发布评论请先 登录
相关推荐
针对电机位置编码器的不同数字接口选择
一个到电机位置编码器的EMC兼容接口设计
电磁兼容(EMC)标准的电机位置编码器接口讲解
【原创分享】磁旋转编码器在永磁同步电机位置测量中的应用
探讨AS5040磁旋转编码器在永磁同步电机位置测量中的应用
光电编码器位置检测研究与应用

针对电机位置编码器接口的 EMC 兼容设计——第6部分
设计符合电磁兼容(EMC)标准的电机位置编码器接口 —— 第1部分
设计符合电磁兼容(EMC)标准的电机位置编码器接口 —— 第2部分
详解双向/串行/同步(BiSS)位置编码器的接口
EMC兼容设计中电机位置编码器接口的选择





 工商网监
工商网监
评论