 基于NXP KV30电机专用MCU的ESC-20A-Nano3电调
基于NXP KV30电机专用MCU的ESC-20A-Nano3电调
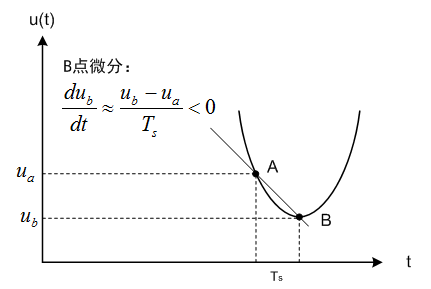
图1 微分经典计算
正是由于传统PID的微分计算方法误差大,而且所需的微分信号极有可能被放大后的噪声淹没,对于大部分的电机驱动器,加了D微分后,效果反而更差,或者作用不明显,所以很多电机驱动器只用比例P和积分I,而不用微分D。
ADRC中的跟踪微分器Tracking Differential是计算微分的一种算法。它已被严格证明,计算出的微分信号是输入信号广义导数的一种光滑逼近。通俗说,就是计算出来的微分信号很精确、很接近实际值。
二、大增益控制
ADRC控制快,最主要的一点是“状态误差反馈控制律”使用了“大增益控制”,相当于PID的比例系数P很大。图2是ADRC的“状态误差反馈控制律”常用的控制曲线,横坐标是误差(目标值-实际值),纵坐标是误差对应的控制量。工作时,误差一般控制在“+阀值”和“-阀值”之间,这一段曲线的斜率很大,也就是说增益很大,只要出现一点点的误差,就输出很大的控制量,具有很强的跟踪能力。但是如果误差超过“+阀值”或“-阀值”,增益还是如此大,系统就可能出现超调、震动等不良现象。所以超过“+阀值”或“-阀值”后,要降低增益,即斜率要减少,避免超调和震动。
这种“小误差大增益,大误差小增益”的做法调和了超调和快速控制的矛盾,但是这需要复杂的指数运算,实际工程中的单片机运算速度有限,未必胜任。所以如果非必要,可以不用该曲线,改用固定的增益,也可改用简单的曲线来逼近。
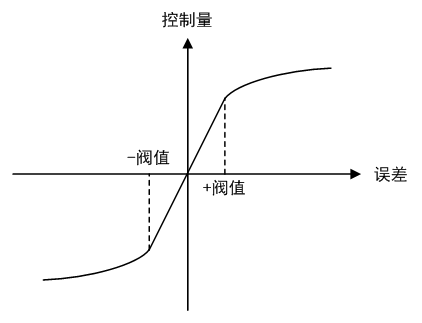
图2 增益曲线
三、扰动直接补偿
之前的微信我们介绍过,ADRC的“扩张状态观测器”输出的观测扰动,包含系统外部的干扰,如强风吹动螺旋桨,影响无人机的电机速度,也包含内部的干扰,例如电机发热,预先估计的特性不准了。对于图3的速度控制,如果实际速度比目标速度高,那么观测扰动是正数,它除以b0后再减去u0,输出量u将减少,电机的实际速度会下降;如果实际速度比目标速度低,那么观测扰动是负数,输出量u将增大,电机的实际速度会上升。这个补偿过程是最直接最快的,不像PID需要一系列计算才调整到输出量,控制就慢了。
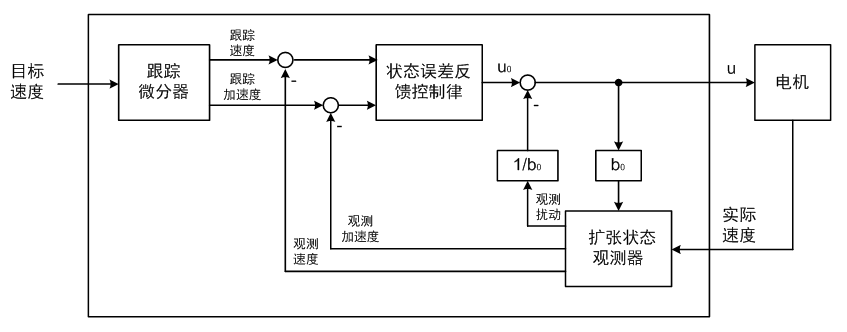
图3 ADRC速度控制
四、快速控制波形
图4是ADRC的速度控制过程,黄线是目标速度,红线是实际速度,蓝线是跟踪加速度,粉线是观测扰动/(-b0)。因为加减速都非常快,所以跟踪加速度、观测扰动火力全开,直接补偿加减速。
图4 快速控制
五、总结
“天下武功无坚不摧,唯快不破。”ADRC在多种手段的配合下,达到惊人的控制速度。
最后请一起欣赏我们精心研发的基于NXP KV30电机专用MCU的ESC-20A-Nano3电调,它只有1个五角硬币的大小,可选配ADRC算法,适用于无人机、医疗设备、空气净化器、水泵、工业自动控制等需要无刷直流电机的领域。
图5 ESC-20A-Nano3 FOC电调
1、基本参数
-
支持6V~18V,最大相电流30A,最大干路电流20A
-
支持-20℃~+85℃使用环境
-
长宽30mm×16mm(如有需要可进一步缩小)
-
最高转速35000RPM(7对极电机)
-
自动识别常规1ms~2ms、OneShot、MultiShot等油门
-
油门信号丢失、过压、欠压、过流、堵转、驱动电路自检等多种保护机制
2、特点
-
节能省电,比方波电调省电5%~20%
-
加减速快,加减速比方波电调快一倍以上
-
超低噪音,正弦波电流,从启动到最高速电机没有电流声
-
可靠启动,零速启动,连续3000次以上可靠地从静止到最高速瞬间启动
-
稳定高速,速度比一般方波电调高5%以上
-
自适应桨,自动适应任何螺旋桨,无需调整参数
-
自动补偿,边运行边自动补偿电机的参数变化
-
NXP
+关注
关注
60文章
1300浏览量
185894 -
无人机
+关注
关注
230文章
10573浏览量
183330 -
ADRC
+关注
关注
3文章
12浏览量
10348
原文标题:自抗扰控制03: ADRC对快速控制有何奇招?
文章出处:【微信号:Zlgmcu7890,微信公众号:周立功单片机】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
基于 NXP RT1052 的 Klipper 3D 打印机下位机方案

针对步进电机的专用驱动方案MD400系列电调

Made with KiCad(111):Vimdrones AM32 ESC 开发板

中国中车66kV-20MVA大容量油浸式海上风电变压器成功下线
用VESC电调代替STLink给VESC电调刷固件 可刷所有的基于VESC的电调固件
雅特力发布高性能电机控制专用MCU
MSXB-L-80kVA/160kV调感串联谐振试验装置
使用TPS6521825和LP873347 PMIC为NXP i.MX 8M Mini和Nano供电

如何利用MD系列电调适配呼吸机电机

MD10x系列电调的上位机功能

伺服电机编码器如何调零
NXP正式推出了全球首款5纳米汽车MCU






 工商网监
工商网监
评论