 使用ADI FRC IMU板的“自主”模式
使用ADI FRC IMU板的“自主”模式
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
adi
+关注
关注
144文章
45809浏览量
247982
发布评论请先 登录
相关推荐
如何在RTOS SDK中将FRC1计时器附加到NMI的信息?
我一直在寻找有关如何在 RTOS SDK 中将 FRC1 计时器附加到 NMI 的信息。我已经找到了 NON-OS SDK 所需的内容,但我找不到 RTOS SDK 的 NON-OS ETS_FRC_TIMER1_NMI_INTR_ATTACH(pwm_intr_hand
发表于 07-10 08:32
IMU中的misaligment误差是如何区分Axis to axis与Axis to frame误差的?
大家好,想咨询一下,IMU中的misaligment误差是如何区分Axis to axis与Axis to frame误差的?
您好,我想询问一下IMU中的错位误差如何区分轴到轴和轴到帧误差?
发表于 05-29 07:51
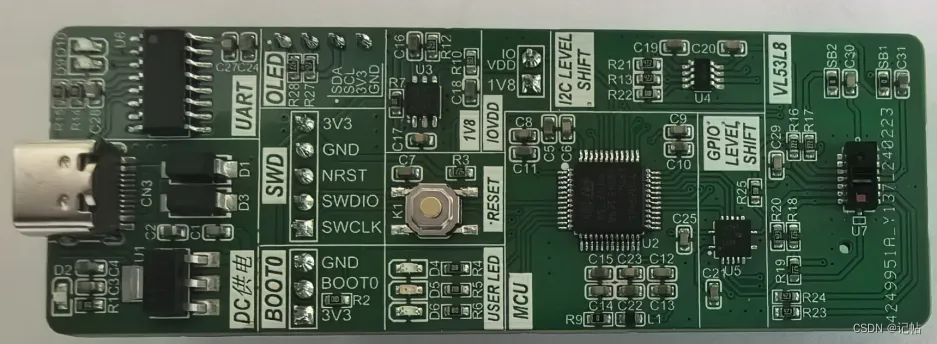
VL53L8CX TOF开发(2)----设置自主模式
“自主模式”(Autonomous mode)通常指的是设备或系统能够在没有外部输入的情况下独立完成任务。对于传感器,如VL53L8,自主模式可能意味着传感器可以独立、定期地进行测量,而不需要来自主控制器或主机的每一次单独指令。
北微推出车规级IMU芯片项目,推动国产化进程
此项目凭借高校教授智库、行业专家与骨干团队的合力,致力于关键工艺突破、新型结构和关键封装设计与实现,以及核心ASIC设计与流片,旨在打造全国产且具备自主知识产权的IMU芯片。
爱普生(EPSON)开发新IMU产品M-G370PDS改善姿态和震动控制
相应地,对提供更高精度的IMU的需求正在上升,这对于姿态控制和噪声性能至关重要。爱普生正是再这种对于高精度IMU的需求之下,开发新IMU产品M-G370PDS改善姿态和震动控制,来填补IMU
严苛工作环境下IMU的最佳选择——爱普生M-G364及M-G354
的IMU产品。随着自主精密农业机械、智能施工机械和无人机应用的快速发展,小型高性价比、高精度定位装置的需求与日俱增,爱普生推出了严苛环境下IMU的最佳选择——爱普生M

M-G370PDF1(IMU)
一般描述 M-G370PDF1是一个小的形状因子惯性测量单元(IMU),具有6个自由度:三轴角速率和线性加速度,并提供了高稳定性和高精度的测量能力与使用高精度补偿技术。各种校准参数被存储在IMU
发表于 01-11 17:00
•0次下载

导远IMU5104成为首个获得ISO 26262功能安全认证的车载IMU模组产品
12月27日,导远电子获得DEKRA德凯颁发,国内首张高精度定位IMU模组ISO 26262 ASIL B功能安全产品认证证书,标志着导远IMU5104成为首个获得ISO 26262功能安全认证的车载IMU模组产品。
【ELF 1开发板试用】+ 7.0 利用icm20607 完成IMU开发【算法】
IMU开发
ELF 1搭载了六轴运动跟踪传感器 ICM20607,集成了三轴加速度计和三轴陀螺仪,那么我们就可以简单的进行开发,将角速度和加速度的数值进行数据融合,计算出开发板当前的姿态,也就是俯仰
发表于 12-13 15:48
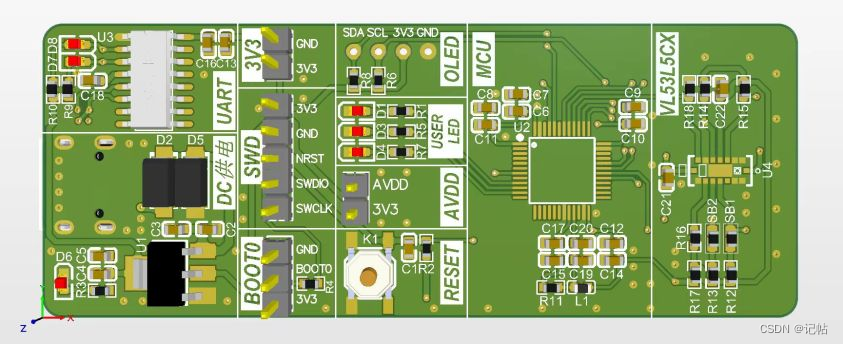
VL53L5CX驱动开发(2)----设置自主模式
"自主模式"(Autonomous mode)通常指的是设备或系统能够在没有外部输入的情况下独立完成任务。对于传感器,如VL53L5,自主模式可能意味着传感器可以独立、定期地进行测量,而不需要来自主控制器或主机的每一次单独指令。

百亿市场!高性能MEMS IMU,将成自动驾驶的下一个风口【附报告下载】
亿元。目前国产高性能三轴芯片自主可控已突破,放量在即百亿市场有望迎来爆发 ○IMU(惯性测量单元)通过测量物体加速度和角速度的变化来推算出物体在三维空间中的位置和姿态。目前高精度MEMS IMU民用市场,主要应用场景包括高精度自
IMU/GNSS与车体外参标定
问题经常是IMU/GNSS与车体坐标的外参、Lidar和Camera的外参、Lidar和Lidar的外参、Lidar和IMU/GNSS的外参。 离线外参标定 1.1 IMU/GNSS与车体外参标定 这个







 工商网监
工商网监
评论