 英伟达新技术:机器人就可以模仿,这究竟是一种什么技术?
英伟达新技术:机器人就可以模仿,这究竟是一种什么技术?
通常机器人在执行任务的时候,我们需要给它输入一串指令,即使是强大的波士顿机器狗也需要通过编程让其学会开门等动作,然而英伟达最近研发出一项新技术,只需要机器人观看人类演示动作,机器人就可以模仿。这究竟是一种什么技术?
工业机器人通常都是一遍又一遍地重复已经编程好的任务,换句话说,执行任务的机器人与编写程序的工程师之间会保持一定的安全距离。然而,越来越多的研究人员都在思考一个问题,如何让机器人与人类的工作环境更加融合,甚至如何让机器人向人类学习。
这也是英伟达在西雅图的新机器人实验室所关注的。据了解,该实验室的研发团队在澳大利亚布里斯班举办的机器人与自动化国际会议(ICRA)上展示了一些他们正在进行的关于机器人教学的研究。
Nvidia展示了一款具有突破性AI机器人,通过观察人类的行为学习完成任务。由Stan Birchfield和Jonathan Tremblay领导的研究人员在他们的研究报告(微信后台回复:英伟达,下载完整论文)中指出:
“通过发出指令让机器人在真实环境中执行任务很容易, 这包括输入期望的结果和实现该结果的最佳方式的任何提示。我们研究出了只需通过人为演示,任务以视觉的形式传达给机器人,并提供关于如何最好地执行任务的线索,让机器人来重复人类的动作。”
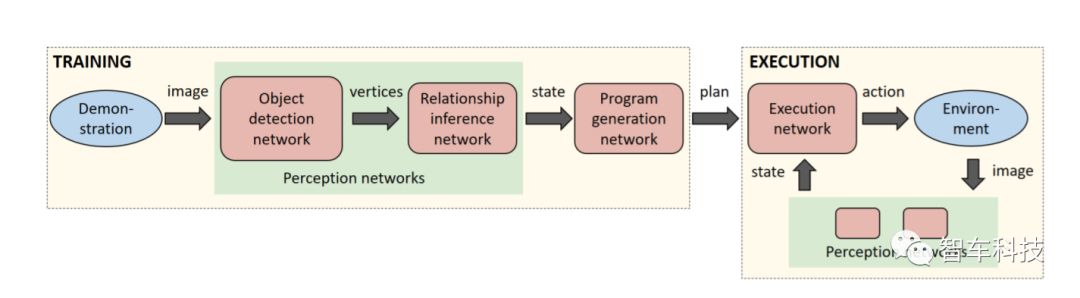
他们提出了一个可以读取真实世界的人类演示动作的系统,并可以完成推断和执行动作。该系统由一系列神经网络组成,包括执行感知,程序生成和程序执行三部分。即使在严重遮挡的情况下,感知网络也可以使用随机域对合成图像进行训练,可靠地检测实际图像中物体。
在这项研究中,人类主要堆叠不同颜色的立方体,把他堆成垂直或金字塔形状。通过一系列神经网络学习人类可读的程序,由机器人执行以重现演示。
首先,研究人员训练了一系列的神经网络来检测积木,推断积木之间的几何关系,然后生成一个程序让它反复观察人类的每个动作。研究人员称,这个新系统能让他们训练机器人在现实世界中只通过一次演示来就可以完成这个堆叠任务。
为了训练出核心模型,英伟达团队还使用了模拟环境来合成无数的场景数据。Birchfield和Fox强调表示,这些模拟可以快速地训练机器人。毕竟,在现实世界中进行培训需要更长的时间,而且还会出现危险。对于大多数任务来讲,也没有可提前参考的培训数据。
Nvidia的这台机器人由该公司的TITAN X显卡支持,该显卡拥有3584个运行频率为1.5GHz的NVIDIA CUDA内核,整体性能达到11 TFLOPS。
使用TITAN X,研究人员训练了一系列神经网络来执行与感知,程序生成和程序执行相关的职责。从单一的人类演示中,机器人可以开始学着执行任务。
英伟达首席研究科学家斯坦·伯奇菲尔德(Stan Birchfield)表示:“在制造业环境中,机器人非常擅长于反复执行相同的任务,但它们无法适应环境的变化,这导致它们无法学会自己的任务。为了重新设计机器人来执行新任务,你必须让专家对机器人的底层进行重新编程。我们感兴趣的是,让非专家型用户更方便地通过简单演示来教会机器人从事新任务。”
这个系统中存在一系列深度神经网络,用于感知、规划和控制,这些网络使用合成的数据来训练。
伯奇维尔德表示:“目前,机器人领域正在出现范式改变。现在,我们可以使用GPU(图形处理单元)来生成无限量的预加标签数据,用于开发和测试算法。这可能会帮助我们开发与周围世界互动的机器人系统,并且规模更大、更安全。”
英伟达的这项研究发表在本周在澳大利亚布里斯班举行的国际机器人和自动化会议(ICRA)上。
未来,如果这一技术发展成熟,是否可以应用在自动驾驶上,通过观察人类驾驶行为,机器人能够熟练操作方向盘,实现自动驾驶就更进一步。当然这只是作者的想象,或许这一技术有更多其他方面的应用。
-
神经网络
+关注
关注
42文章
4771浏览量
100752 -
工业机器人
+关注
关注
91文章
3363浏览量
92641 -
英伟达
+关注
关注
22文章
3775浏览量
91033
原文标题:英伟达新技术:机器人只需观察人类动作,就能瞬间模仿
文章出处:【微信号:IV_Technology,微信公众号:智车科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论