 在LED照明设计中使用T型样条自由曲面光学优化
在LED照明设计中使用T型样条自由曲面光学优化
自由曲面光学是照明行业在光线重定向到目标区域方面的改变者。非均匀有理B样条,通常称为NURBS广泛用于表示自由曲面和曲面。有一些光学系统需要在设计或优化阶段对表面进行局部修饰。在这种情况下,NURBS不能提供这种转换。但是一个叫做T-splines的新数学表达式使得这是可行的。虽然它的潜力已被很好地描述,但迄今为止尚未在任何优化程序中实施。Annie Shalom Isaac,来自卡尔斯鲁厄理工学院的Jiayi Long和Cornelius Neumann通过在优化程序中执行T型样条证明了局部细化能力的优势,并对结果进行了评估。结果表明,与NURBS相比,T样条提供更均匀和均匀的光分布,且收敛速度更快。这使得使用T样条的光学设计或优化成为未来自由形式设计任务的直观方法。
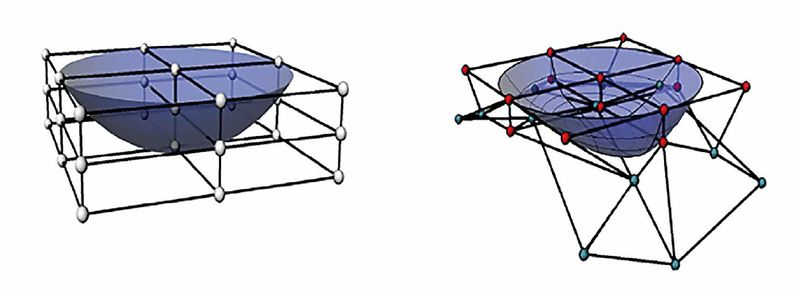
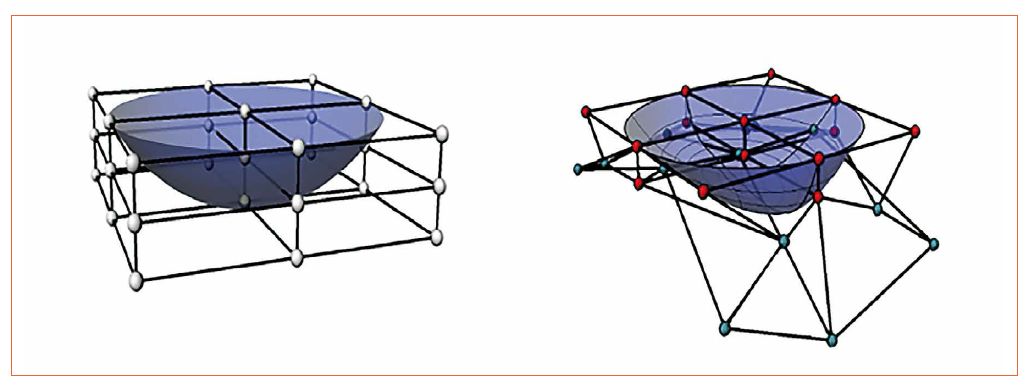
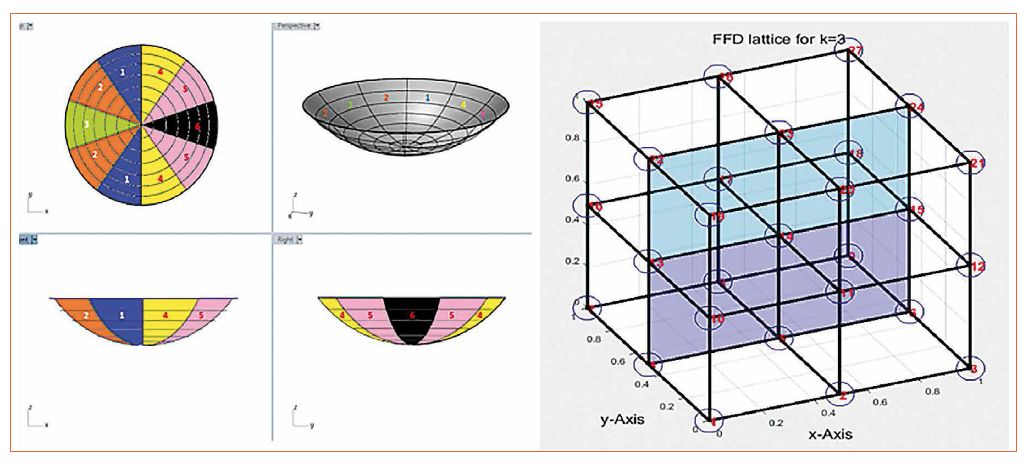
3x3 OFFD栅格在(左)和(右)变形之前封闭和光学表面
自由形式光学器件的设计在很大程度上依赖于以下方法之一:基于点源假设[3],SMS设计[4]和基于等通量网格[5]的源目标图的裁剪以创建初始光学表面。由于这些数学方法不能保证为扩展的LED光源提供准确的结果,也不能提供通用的解决方案,光学设计师仍然依靠任何优化工具来改善结果。光线跟踪算法中的速度提高以及复杂的智能优化算法使优化方法的应用更加广泛。但自由曲面优化的缺点主要是由于其复杂的数学表达和许多参数的存在。
Wendel et.al提出了一种称为优化的方法,使用自由形变(OFFD)来克服这个困难,将光学表面置于网格中并使封闭的网格变形而不是直接作用于网格[1]。这种方法使用NURBS来表示光学表面,其结果表明,使用较少的优化变量,它们可以很好地实现全局变形,这使得制造更容易。但是有些情况下需要在光线分布上有明显的倾斜,或者光线的路径必须显着改变。在这种情况下,轻微的局部变形会带来显着的改善。但是对于目前的OFFD,这是不可能的,因为下面的表面表示。称为T样条的另一种表面表示法可以克服这个缺点[2]。Bailey等人。al已经证明了T-splines的潜力及其在光学表面的应用[6]。但是迄今为止,这种方法既未应用于任何优化程序,也未对其光学性能进行分析并与NURBS进行比较。
因此,这项工作考虑了这个问题,并提供了解决这个问题的替代方法。第2部分介绍了OFFD技术。光学表面的数学表面表示在第3节中介绍.T样条的实现结果和比较结果在第4节中显示,随后在第5节中给出结论。
使用OFFD进行优化
OFFD方法采用Sederberg [7]提出的自由变形(FFD)技术,并结合优化程序。网格和光学表面之间的关系使用FFD算法很好地建立[7]。图1显示了在变形之前和之后具有光学表面的网格。为了简洁起见,只介绍OFFD方法的概述。
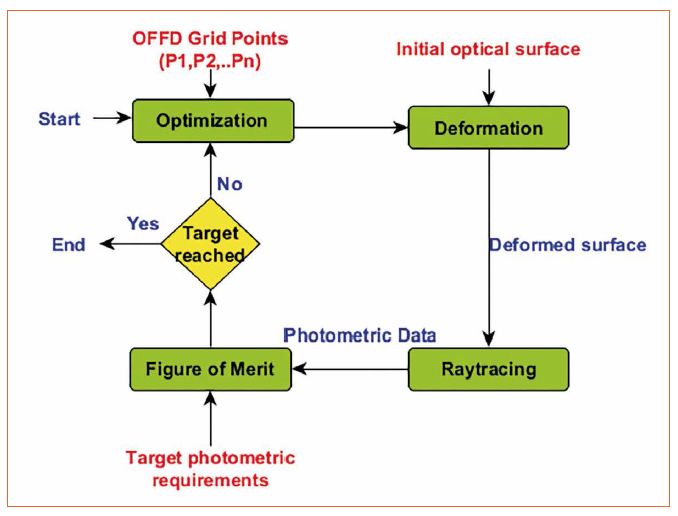
该算法首先选择一个输入表面,其光学性能必须得到改善,这通常远离目标。通过这种方法,光学表面被包围在包含27个网格控制点的网格内,并且用户可以从它们中选择任何组合。这作为变量提供给优化算法。优化算法对于选定的网格点组合具有广泛的搜索空间,并提供沿三维向封闭网格的移动。随着封闭的网格发生变化,它也会改变其内部的光学表面。然后对变形后的表面进行光度评估,优化算法根据此结果决定其优化变量的变化。该算法一再重复,直到达到目标照明要求。
这个程序中最重要的一步是变形光学表面的品质因数定义,因为整个优化是基于这个单一的值,称为Q.在本文中,我们使用两个不同的评价函数。
偏差评价函数Qdev,其对应于当前模拟分布与期望分布的偏差并被表示为

G是人们感兴趣的区域,Eideal(x)是期望的照度分布目标,E(x)是当前的光分布。
通量择优函数Q磁通对应于最大化,其中被量化为在目标(Φ通量的比率所需的目标区域中的通量吨),并通过光学器件收集φC可用通量。
光学表面的数学表示
NURBS
NURBS技术非常成熟,可用于计算机辅助图形系统以及光线追踪器。由于其灵活性,可以通过在优化程序期间更改控制点或其重量来轻松操纵或修改曲面。NURBS曲面是参数张量积曲面,定义如下:
其中Pij是控制点的矩形阵列,其中Pij是(n + 1)×(m + 1)矩阵,wi,j是权重,Nip(u)和Njq(v)是u和p的基函数, v方向,分别与结矢量相关联。

其中r = p + n + 1和s = m + q + 1成立。当必须在NURBS中添加控制点时,使用结插入方法完成控制点。添加单个节点需要添加整列或一排控制点。使用NURBS也不可能去除结头,而不会改变几何形状。这种局部细化主要限于NURBS,因为它的张量产品结构如EQ3所示。如图3所示,NURBS曲面被逐列水平和垂直逐行地重复。为了满足这种平衡,如果增加一个新的控制点,则同时添加整列或一行控制点。

T样条
由NURBS强加的缺点可以通过称为T样条的自由曲面的替代数学表示来解决。T型样条概括了B样条,通过向图3中相关的B样条添加T型结,将特定的行和列参数分配给特定的控制点。这使得T样条在局部变形中是一种更先进的技术,不需要的控制点。T样条是基于点而不是基于网格的张量积B-样条。控制网格称为T网格,T样条曲面的定义由下式给出
其中Pi是控制点。Ni(u,v)是基本函数,由下式给出

基本函数Nui(u)和Nvi(v)分别与结向量相关联

当一个人插入一个新的控制点或一个结时,其他控制点之间的间隔必须被改进而不会改变其形状。这是通过满足EQ6分别对两个单变量基函数Nui(u)和Nvi(v)进行细化来完成的。这种局部细化的性质不会增加控制点的数量,也不会改变几何图形使T型样条自然成为在OFFD中实现并实现局部变形的理想选择。
T形样条在OFFD中的应用
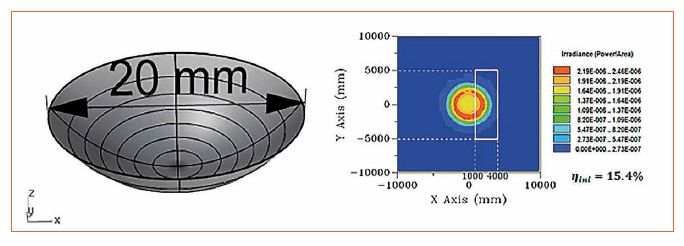
最后一节介绍了T样条的理论背景和在局部变形中使用它的优点。本节介绍T形样条在第2节简要介绍的自由形变系统优化程序中的应用。在我们的例子中,我们使用了与[1]中使用的设计路灯透镜相同的光学设计任务。将具有100流明的Cree XPG2 LED用作光源,并且优化前的初始表面如图4所示。为了评估光度性能,应用等式1和2中表达的评价函数。
要在OFFD中开始T-spline实现,必须在所需区域添加更多控制点,并且曲面形状保持不变。在更多和更密集的控制点聚集的区域内实现更多的局部变形。然后进行研究以发现变形过程对透镜的哪个部分更多的影响,以及如果该部分上的敏感局部变形导致更好的结果。
整个光学表面分为六个部分,如图4所示。此步骤基于直观的假设。y方向的对称性是由于目标街道和灯停留在y方向的中间(图5)。为了直接比较,选择网格点[1,3,13,15]。更多的控制点被添加到从1到6的每个片段中。最后,生成了六个新的光学曲面。这些生成的新T样条曲面与初始曲面之间的唯一区别是控制点数量的差异。光学器件的形状保持不变,没有任何预期的变化。这些光学表面一个接一个地作为OFFD的初始表面,并使用所述的优点函数进行评估。初步的结果表明,当更多的控制点被添加到分段5时,可以看到对光分布的更多影响。因此,在分段5处具有更多控制点并且在其余分段处具有更少控制点的光学表面被视为用于优化的初始系统并且与NURBS进行比较。然后将这个结果与基于NURBS的OFFD进行比较,结果在下一节中讨论。
初始系统
的性能初始表面的光学性能如图6所示,只有目标内部总通量的15%,并且分布形状远离需要的标记为白色的矩形分布。
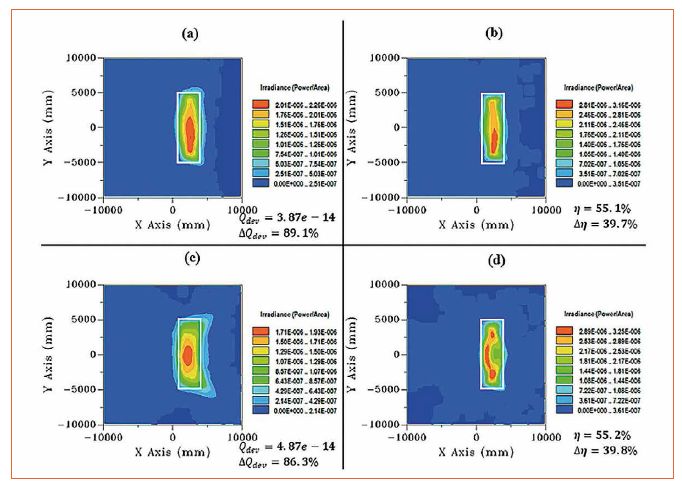
NURBS与T样条的比较
用于比较用于分析街道照明镜头的NURBS和T-splines的两个重要光度测量方法是目标中的总光通量,并且均匀照明分布在目标上。NURBS和T-splines在同一水平上执行目标中的总光通量,发现其为55%,如图7b和7d所示,产生40%的改善(Δn)。但是T样条在根据需要塑造目标分布方面的表现要优于图7a中的模拟结果。如图7b所示,使用T样条的照度分布比具有NURBS的分布更均匀。使用NURBS和T样条的变形光学曲面如图8所示。略微不同的是在边缘附近的T型样条,在图4中标记为段5。

如果使用NURBS需要获得相同的结果,则网格中的控制点对用户的选择更为敏感。当准确选择时,可以获得这些结果,但代价是优化的运行时间很长 - 几乎是使用T样条所需时间的两倍。使用T样条的最大优点是当用户知道光学表面的局部变形部分时,他可以对网格中控制点的选择产生最小的困扰。
结论
这项工作突出了T形样条的使用,通过在优化程序中首次实现光学曲面的局部变形。结果表明,使用T样条可以获得比NURBS更均匀的光分布。当使用T型样条时,FFD网格点的灵敏度会降低。这对智能优化系统非常重要。由于T样条曲线是更高级的曲面表示,所以它尚未成熟。CAD技术和光线追踪器尚未达到导入的程度,并且直接使用T-splines文件格式。所以在本文发表时,人们仍然需要依靠T样条向NURBS的前后转换来执行光线追踪。另一个限制因素,但并不是很大,因为控制点必须在需要的地方更精确地加入。
-
NURBS
+关注
关注
0文章
9浏览量
7469 -
自由曲面
+关注
关注
0文章
5浏览量
8580
原文标题:在LED照明设计中使用t -样条优化自由形态光学
文章出处:【微信号:hqlednews,微信公众号:华强LED网】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
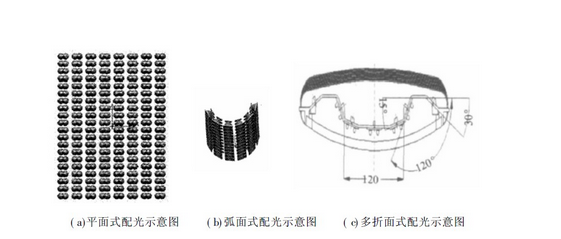
自由曲面光学元件的LED路灯配光方案
《LED照明设计基础与技术应用》新书介绍
LED照明设计基础知识
LED照明设计手册完全版(中文)





 工商网监
工商网监
评论