 图灵测试的现实意义,图灵测试本质上是替代测试
图灵测试的现实意义,图灵测试本质上是替代测试
一个人工智能深度学习的问题,科学家、统一物理学家、神经生物科学家从不同的角度想把深度学习尽可能说清楚,尽可能学术化。对于搞机器专业的人来说,从来都是算法、程序、数据。怎么样通过大量的数据,略微的修改,呈现我们的产品,对我们来说是一个颠覆性的问题。
5月19日,在2018全球人工智能技术大会上,CAAI中国人工智能学会理事长、中国工程院院士李德毅发表了题为“路测的学问--无人驾驶的后图灵测试”的演讲,畅谈了无人驾驶的发展前景。
以下为李德毅院士在本次大会中的演讲实录,经本人同意整理后发布。
李德毅:刚才听了姚先生的报告很有感触,一个人工智能深度学习的问题,科学家、统一物理学家、神经生物科学家从不同的角度想把深度学习尽可能说清楚,尽可能学术化。对于搞机器专业的人来说,从来都是算法、程序、数据。怎么样通过大量的数据,略微的修改,呈现我们的产品,对我们来说是一个颠覆性的问题,所以我觉得很有启发。
今天跟大家讨论另外一个技术性的问题:图灵测试。无人驾驶的车子,大的小的都在路上跑,可能你旁边的车不经意就是无人驾驶,所以讲一讲路测的学问。也就是无人驾驶在后图灵时代的测试是怎么样的。
最近Google发明了机器人打电话,将来你接到的电话你可能搞不清楚是人打的还是机器人打的,这个事情有点麻烦,尤其他它的语音和你原来朋友的语音是一模一样的,怎么办?现在国内外火爆的无人驾驶测试活动,各地区都在建设封闭或半封闭的测试场。这样一来,就要把后图灵时代的图灵测试推向前所未有的高潮期。沉浸了多年的图灵测试不是科学家在做,是全民在做。我想,这可能是阿兰•图灵自己也没有想到的。
一、图灵测试的现实意义
最近有一家公司的共享汽车发生了事故,全民关心。涉及到什么问题?出租车行业的职业道德、职业底线、职业操守的问题。最近又联系到无人驾驶车在全世界死人的问题,大家也很担心。交通部门发出很多的规定,特别是有的地方法规要求,无人驾驶车必须先在封闭环境里安全行驶五千公里才可以上路测试,如果你家里有一个车,跑五千里不算数就耗费掉了,还是挺心疼的。
去年和今年Google发布了他们的自动驾驶路测报告,已经到了一千英里,到明年的时候,机器人一直在问人类,你们为什么还不给我们发驾照?如果发驾照发什么?中国的驾照有A类、B类、C类,开小车的是C照,开大车开的好的可以拿到A照,也不容易。无人驾驶车发什么照?将来是不是发AP照、BP照、CP照?
无人车上路要发驾照已经成为各国交管部门当务之急,已经成为社会的普遍关注。如果图灵还在世,他会怎么做?
1950年,他写了一篇论文登在杂志上,题目是“计算可以思维吗?”我们说是计算的机理和智能,如果测试人看不到人和机器,在密闭的环境里,如果不能区分人和机器,大概就是智能的。2014年,一个聊天机器人尤金•古斯特曼投入了测试。
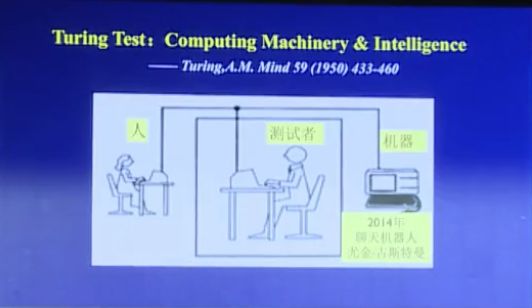
图灵的这篇文章到底是“机器可以思维吗?”还是“机器能够替代人吗?”这是两个命题。什么叫思维?替代好像好办一点。从图灵描述的图来看,好像是Tester,如果把人和机器分别换上特斯拉的Autopilot和一个真人Human Driver,调换一下,直升机在天上看,你可以看出区别吗?看不出来就说无人驾驶通过了图灵测试,可以吗?所以人类进入了后图灵测试时代。
当客服机器人和我们聊天时,他在听你也在听,他在说你也在说,甚至可以同时问问题、翻译、语音。机器人医生给我们进行远程医疗时,当陪读机器人为孩子做咨询或辅导时,当机器同传能够使得我们和外国朋友直接交谈时,当机器人写作的诗集出版了,著作权人是?法官和法官机器人,谁判决准确率更高?所以机器人已经走入千家万户。
我们人类是拿驾照的,在座会开车的同志们都知道,当你刚拿到驾照时,你跑了五千公里吗?五百都没有,五十公里差不多。你当了1-2年的菜鸟,后来跑了几万公里时你才是老司机。为什么对机器人那么苛刻?
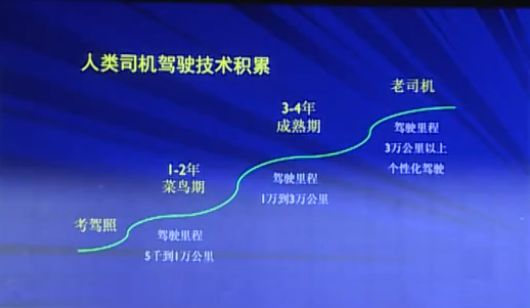
人类社会常年考驾照,测试标准和测试环境已经能够清楚界定,加以驾驶行为大数据可以精准收集,评测结果较为客观。国内的这些人拿驾照,考官都不在现场,都在房子里看你有没有碰到杆子。已经积累了丰富的测试经验。
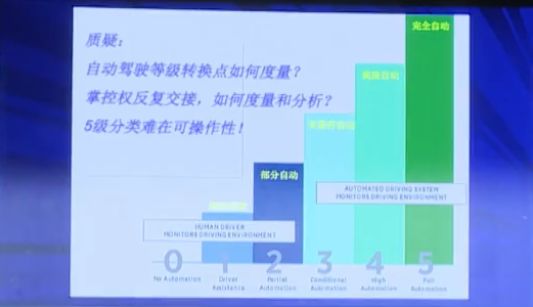
在这样的情况下,3016标准给了我们一个档案,把智能驾驶分六个等级,到L4的时候,就可以不要眼睛和注意力了,到L5时就不要驾驶员了。
自动驾驶的等级转换点如何度量?有的企业说我是3.5,有的说是2.5,怎么度量?当汽车把接管权交给人时,反复说怎么样度量。尤其是第五级,什么叫完全自动?很恶劣的天气,人都不能开,还能完全自动吗?
所以,将来人类怎么样给无人驾驶发驾照?
第一步:在车里配一个安全驾驶员,让无人车自己开,但安全驾驶员有驾照,随时干预。这是目前的状况。
第二步:不要驾照的安全员在车里,可以干预车,但这个安全员本身可以没有驾照。
第三步:共享汽车时乘员不必有驾照,但仍然可以人工指挥,因为我们知道,机器人和人在一起时一定要听人指挥。
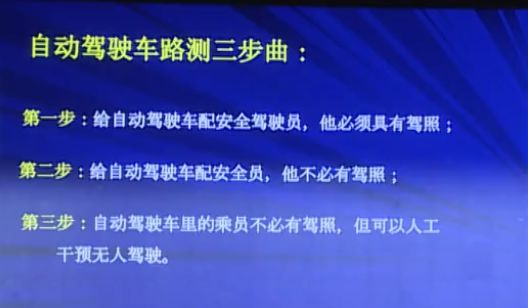
按照这个“三步曲”,看图灵测试是多么重要,因为各行各业都需要人,这个机器人应该持照上岗,这个“照”谁来发?
二、图灵测试本质上是替代测试
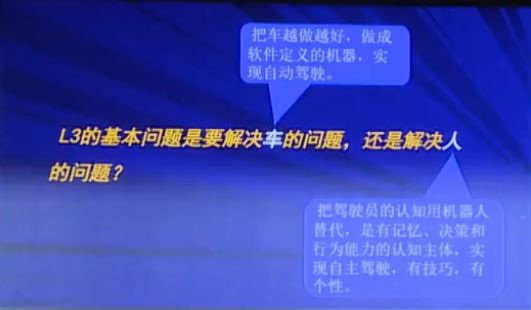
图灵测试本质上不是智能测试,是替代测试,是机器人能不能替代人的工作。无人驾驶难在拟人,我们有马车的时候,觉得马车不够快换了汽车。虽然汽车开的快,但有的时候不如马,因为老马识途,汽车没有地图怎么回去?当我们讨论L2是辅助驾驶,L3是自动驾驶时,L3的基本问题到底是放在车上还是人上?如果放在车上,就要让车企的同志们把车越做越好。我最近访问了一个博士,他是做底层设计的,要在中国做线控的自动改造,我们把车子越做越好,像特斯拉一样,做一个软件定义的机器人,要自动驾驶,这是一条龙。我做无人驾驶时,也希望一个好的线控的高精度的自动驾驶的汽车,但我把重点放在解决人的问题上,把驾驶员的认知用机器人替代,是记忆、决策和行为能力的认知主体。长期以来,我们有一个词不停说,那就是Agency。有的中文都不翻译Agency,其实本意就叫代理。实际上我们现在做的就是做一个驾驶员的智能代理,实现智能驾驶,希望这个代理有驾驶的技巧,还有驾驶的个性。
汽车的行为由驾驶员决定,无人驾驶难在拟人,要研究驾驶员的行为学和心理学,物化驾驶员的感知、决策、记忆、控制和行为技巧,而不是一味地改进车辆动力学性能,实现自动驾驶!最近我们的团队在天津港用卡车做了一个精准定位,以前我们做一个精准定位,无论是空的还是满载,大概误差在20厘米。港口的装机场要求准确落在无人驾驶卡车上,提出5厘米的定位要求。其实集装箱的大卡车很难到5厘米。所以做好无人驾驶,既要有好的车,更要有好的驾驶员的智能代理。
我们曾经在常熟自然科学基金委组织了多次比赛,提出“4S”评测标准,开车要Smooth、安全Smart、Safety、Speed。从这个角度上来说,我们已经做了大量的工作。
各省都在建测试场,什么时候我们身边来一个无人驾驶车,开车的人不再惊讶,可以跟他很轻松、友好的进行交互。
三、图灵测试本质上是交互智能测试
图灵先生提出用对话的方式考虑一个机器的语言智能。把机器人的记忆智能和计算智能藏了起来,当前的聊天机器人把对话交互方式推向了高潮。
在开车过程当中,驾驶员与环境和周边车辆有没有交互?我认为是有的,必须不时的与环境和周边车辆进行交互,驾驶员的经验和临场处置能力必须能够体现。我们为此在交互认识之上做了很多的工作,首先研究了无人驾驶基于语言的交互。无人驾驶车面对复杂、不确定的周围环境,可以通过智能音箱、手机和互联网的方式,进行语音、语义等自然语言的理解,与车主、乘员、运行维护人员、远程约车请求等进行不同人群之间的交互。

无人驾驶要能够响应远程车主的干预,因为车主是这个车子的主人,还要能够响应约车的请求。运维人员可以远程在线干预无人驾驶车,研发人员可以利用特定的接口,与无人驾驶进行交互,监控车辆实时状态,完成调试工作。无人驾驶车还要能够识别周边人群的肢体语言,例如现场执勤的交警,你必须服从它。行人要坐你的车,可能看你比较远,用手势来表达,你也必须能理解。
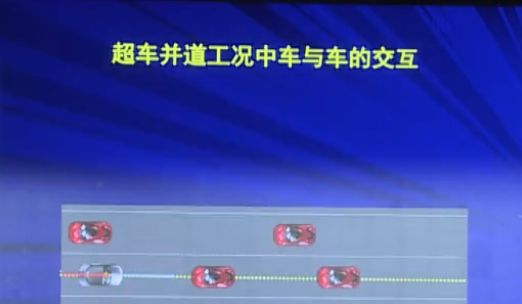
超车并道在无人驾驶中是一个难点,尤其当低速车道汇入高速车道比较难。我们做了一个例子,例如有四个红车是有人驾驶,一个灰色的车辆是无人驾驶,怎么换道?一定不时跟你周边几个车辆用打灯、按喇叭或者踩油门、刹车的方式告诉周边的人,如果他跟你协作,你超车并道了。
无人驾驶车辆的交互,我们已经在宇通公交客车和天津港的集卡上做了初步实现,在刚刚召开的天津2018世界智能大会上获得交互组的领军奖。现在都不讲冠军、亚军或季军,冠军叫领军奖,亚军叫领先奖,季军叫优秀奖。
四、图灵测试本质上是不确定性智能测试
图灵测试有没有漏洞?几十年来,大家为图灵测试开了多少次会?我发现一个漏洞,因为图灵测试要求测试人是主体,如果被测试的一方支支吾吾、保持沉默或者主动插话介入,就可能抢过了话语权,颠覆了测试者的主导定位。就像青年人去面试,本来老板考他,他很厉害,考了老板。就很难区分对方到底是人还是机器人,再一次暴露出图灵测试的瑕疵。
图灵测试对话过程中充满了不确定性,例如聊天本来是浅层次、短时长的对话,也是最通用的对话,有的就是为了消磨时间、客气、礼貌,充满了不确定性,总是在讲一些所谓的废话,其实废话不废,它带来了亲和感,在社交生活中不可或缺,不会聊天的对话机器人,人们会觉得它太乏味。所以不要完全从负面看。
不确定性智能测试表现在:对话的语境和语用、情感的交互、交互环境的不确定性。我们必须研究不确定性智能的客观性、普遍性和积极意义,寻找不确定性中的基本确定。
驾驶员曾经开过这样的车,想换道,结果后面的车子不让你,你开了一半又回来了。这种情况还是经常有的。总共有五种情况,首先常见的就是生成超车并道,成功了。也有超车过程中,中途放弃换道,回到原车道。也有强性换道,不换也得换,等等。
无人泊车过程中有很多的不确定性,尤其是非常规的泊车,我们叫边缘泊车。大家都说无人驾驶难在最后一公里,因为它把人放下之后,往哪里去?很多的选择,加油站、停车场?我个人认为,应该把最后一公里当做最先一公里来解决,否则老百姓不接受。
人工智能的使命就是加速汽车向可交互的轮式机器人的转变。
目前全国各地火爆的智能驾驶专用实验场和评估环境,很可能发展成为人与轮式机器人比赛驾驶智能的实验场,发展成为赛车手和赛车机器人角逐冠军的比赛场,发展成为后图灵时代的图灵测试场。
我们一般看车就是看底盘大架、发动机,底盘就是看它的手和脚,实际上是驾驶人力量的延伸。发动机就相当于心脏。而我们加了传感器、指纹,等于加了一个智能代理。因此有可能使得汽车成为我们驾驶员自己,这应该是人工智能时代最有意义的科学课题,再一次彰显了图灵测试的意义。
机器人全人带来了一个新的行业,就是后图灵时代的图灵测试应该考虑人机共生、共融、共发展的测试方法学和测试标准的时候了。
-
无人驾驶
+关注
关注
98文章
4074浏览量
120615 -
深度学习
+关注
关注
73文章
5507浏览量
121265 -
图灵测试
+关注
关注
1文章
9浏览量
7362
原文标题:李德毅院士:路测的学问--无人驾驶的后图灵测试
文章出处:【微信号:IV_Technology,微信公众号:智车科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
什么是回归测试_回归测试的测试策略
WIFI信令测试详解,附天线测试

小鹏汽车图灵芯片及L4自动驾驶新进展
小鹏汽车2024 AI科技日:图灵AI芯片进展公布,预计AI汽车市场将迎来巨变
图灵测试的内容是什么_图灵测试的作用
图灵测试什么意思_图灵测试是干嘛的
小鹏自研图灵芯片震撼登场:流片成功性能超越行业旗舰
PEM罗式线圈在高压绝缘放电测试瞬态变化上的应用
国芯科技与图灵量子签署战略合作协议
国芯科技与图灵量子达成战略合作,共研量子技术新篇章
接口测试是测试什么内容
接口测试属于功能测试吗为什么
仿真测试与实车测试的区别
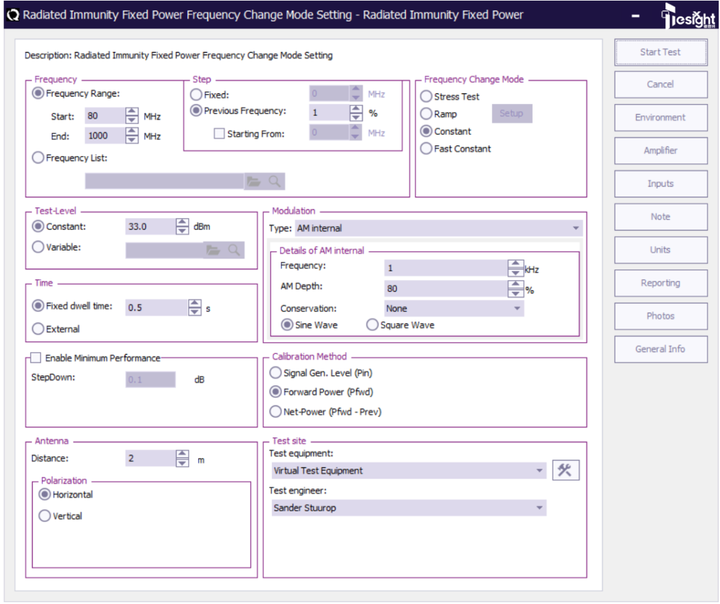
如何使用EMC测试软件执行辐射抗扰度测试?(二)测试、校准方法及调制
如何使用EMC测试软件执行辐射抗扰度测试?(一)测试方法





 工商网监
工商网监
评论