 智能交通领域的地图数据库建设和数据交换标准
智能交通领域的地图数据库建设和数据交换标准
智能网联汽车是一个集成的时空传感器,其感知系统是路网、通讯网、定位网三网合一。将自动驾驶地图与视觉的感知信息融合到一起,才能得到车辆可以行驶的空间,继而在此基础上规划车辆运动学的轨迹,转化成方向盘和油门、刹车的信号。因此,我国的自动驾驶地图工作组将由地图厂商、整车企业、零部件企业、车联网服务商、自动驾驶技术提供商,以及高校和科研院所多方共同研讨制定。
对于L4以上的自动驾驶,自动驾驶地图已经成为必备项,未来的自动驾驶大脑将基于实时更新的地图大数据驱动。但是智能网联汽车的各参与方,对于自动驾驶地图应该是什么样的,如何将传感器数据、车联网与自动驾驶地图融合等问题并没有形成统一共识。
这一问题的解决首先需要建立起共同的标准和框架。在第五届智能网联技术年会“自动驾驶地图”分论坛中,清华大学汽车工程系主任杨殿阁教授介绍了世界自动驾驶地图组织情况。
▲清华大学汽车工程系主任杨殿阁
国际上关于地图标准的工作组是ISO TC204/WG3,针对智能交通领域的地图数据库建设和数据交换标准。在欧洲有两个地图数据物理存储格式规范组织——NDS与OpenDrive。2013年,NDS理事会成立第三工作组启动高精度地图标准的研究,推出的NDS2.5已经为2020年自动驾驶技术做好准备,其物理存储格式与OpenDrive之间可以动态转化。中国的BAT、日本大部分车厂都已加入了NDS组织。
欧洲的另一个标准组织ADASIS针对的则是地图与车载应用之间的接口。ADASIS在2013年开始考虑支持高精度数据,并在欧洲智能交通协会主导下,于2015年12月与NDS联合成立了OADF Forum,对接国际ISO和日本SIP-ADUS,希望能建立起整个自动驾驶和地图的标准框架体系,并成为欧洲及其它地区的强制标准,到2025年在全球实现42%的渗透率。
自动驾驶地图是高级别自动驾驶技术实现的必要数据基础,一旦接受了国外标准,不但会面临经济上的高额支出,整个智能网联产业也会长期受制于人。以日本为例,虽然很多企业加入了NDS,但并没有完全接受这套标准,在日本国内的战略性创新创造项目“SIP-adus”计划支持下,日本各整车企业、零部件公司、地图厂商联合起来,成立了动态地图公司DMP,是日本唯一从事高精度基础地图数据和定位服务的公司,致力于推出日本标准的高精度地图。
杨殿阁认为中国在自动驾驶技术的发展上也必须独立自主,开发中国标准的自动驾驶地图是一个必要选项。而且中国道路交通条件最具特点,中国的地图厂商和车企具有丰富的制图和用图经验,完全具备独立完成中国标准自动驾驶地图的能力。
事实上,由杨殿阁担任组长的自动驾驶地图工作组(CAICV HD MAP WG),刚刚于5月23日在中国智能网联汽车产业创新联盟第一届理事会第四次会议上得到批准。工作组定位于建立中国标准地图及服务体系,以及成为车企与地图厂商、国家测绘管理部门的桥梁,与NDS(欧洲)和DMP(日本)开展平等合作,并形成数据转换机制。
自动驾驶地图工作组将重点针对面向智能汽车的自动驾驶地图以及高精度定位及时空服务相关的关键技术、标准、规范及法规进行研讨,具体包括:
1.对车用高精度基础地图数据的模型、结构、接口、标准、规范以及动态地图数据共享体系、机制、方法、协议、接口等开展研究。
2.进一步研究基于地图为自动驾驶提供高精度时空服务,对服务的接口、协议和相关标准进行探讨。
3.建立统一的智能汽车自动驾驶地图服务标准和自动驾驶地图落地应用的技术路线图。
谈到自动驾驶地图,人们往往将之等同于高精度地图。高精度地图提供更精细更丰富的地图数据内容,记录了各类丰富的道路要素、道路设施、周边建筑信息等数据对象。通过更高的精度,更详细的属性来构建完整的自动驾驶环境以及智慧城市环境。但实际上,自动驾驶地图最底层的数据还是宏观的导航数据,自动驾驶地图也要支持驾驶导航、支持车的任务规划,从这个角度来说,传统图商在自动驾驶发展过程中仍将发挥重要作用。
但自动驾驶地图的标准制定并非图商一己之力能够完成。智能网联汽车是一个集成的时空传感器,其感知系统是路网、通讯网、定位网三网合一。将自动驾驶地图与视觉的感知信息融合到一起,才能得到车辆可以行驶的空间,继而在此基础上规划车辆运动学的轨迹,转化成方向盘和油门、刹车的信号。正因如此,在欧洲,自动驾驶传感器联合工作组织SENSORIS,以及车联网联合组织TISA就一起加入了OADF。我国的自动驾驶地图工作组也将由地图厂商、整车企业、零部件企业、车联网服务商、自动驾驶技术提供商,以及高校和科研院所多方共同研讨制定。
杨殿阁介绍,目前,自动驾驶地图工作组已经有清华大学、百度、四维图新、高德、滴滴出行、中海庭、千寻位置、一汽、上汽、长安、北汽11家发起单位,并将继续吸纳新的成员。加入工作组不收费,在联盟知识产权规定下享有工作组共同工作成果,包括文档资料及其他技术资料。2018年,工作组的重点研究课题包括:
1、自动驾驶地图标准体系研究
牵头单位:四维图新
责任专家:北京四维图新智能地图事业部研发总监 于立志
2、地图偏转问题研究及测科院测绘局沟通交流
牵头单位:高德
责任专家:高德汽车事业群高精度地图产品总监 谷小丰
3、自动驾驶地图技术及应用路线图探索研究
牵头单位:中海庭
责任专家:中海庭公司总经理 刘奋
对于自动驾驶地图而言,可用性、规模性、性能表现、成本等都是制约其发展的关键挑战,要提供更有效率、安全的解决方案,行业内广泛的合作和统一标准必不可少。我国正在组建国家智能汽车创新平台,高精度地图基础数据平台是支持这一创新平台的基础体系之一。中国标准的建立可以针对中国特殊场景、中国驾驶员行为特点以及中国的产业特点,推进智能汽车的转型升级,杨殿阁领衔的自动驾驶地图组,无疑是朝这个方向迈出了极具历史意义的一步。
-
智能交通
+关注
关注
12文章
804浏览量
43486 -
自动驾驶
+关注
关注
784文章
13838浏览量
166532 -
智能网联
+关注
关注
4文章
606浏览量
23254
原文标题:清华大学领衔,自动驾驶地图将建立中国标准
文章出处:【微信号:IV_Technology,微信公众号:智车科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
数据库加密办法
数据库数据恢复—Mysql数据库表记录丢失的数据恢复流程
南方智能参编《城市信息模型 数据交换标准格式》
数据库数据恢复—MYSQL数据库ibdata1文件损坏的数据恢复案例
云原生和数据库哪个好一些?
多维表格数据库Teable的适用场景?
数据库数据恢复—通过拼接数据库碎片恢复SQLserver数据库
Oracle数据恢复—异常断电后Oracle数据库启库报错的数据恢复案例

数据库数据恢复—Oracle数据库文件system01.dbf损坏的数据恢复案例

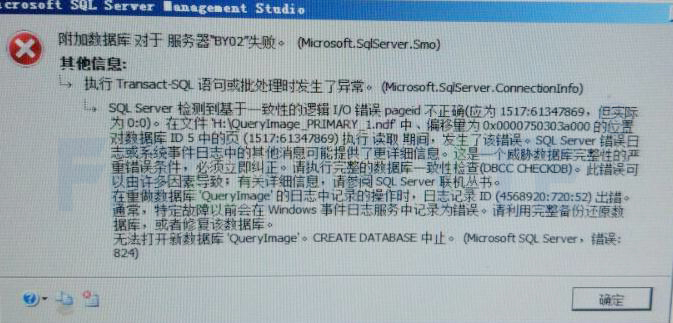
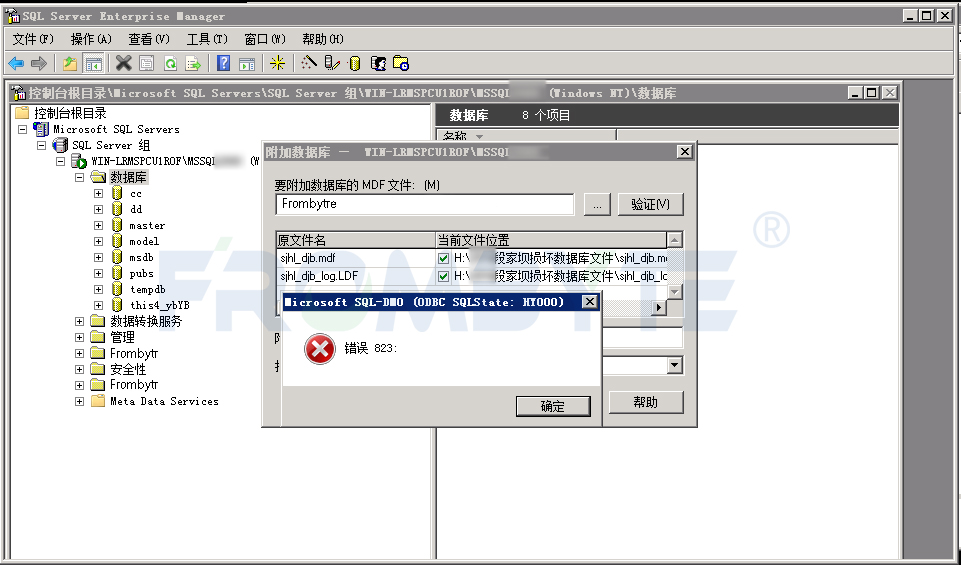
数据库数据恢复—SQL Server数据库出现823错误的数据恢复案例

数据库数据恢复—SQL Server数据库所在分区空间不足报错的数据恢复案例
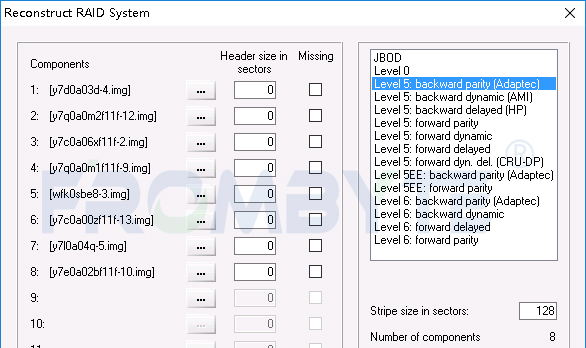
数据库数据恢复—raid5阵列上层Sql Server数据库数据恢复案例
通过Modbus读写数据库中的数据
【数据库数据恢复】Oracle数据库ASM实例无法挂载的数据恢复案例





 工商网监
工商网监
评论