 舵机信号线怎么区分_有什么作用
舵机信号线怎么区分_有什么作用
舵机(英文叫Servo)它由直流电机、减速齿轮组、传感器和控制电路组成的一套自动控制系统。通过发送信号,指定输出轴旋转角度。舵机一般而言都有最大旋转角度(比如180度。)与普通直流电机的区别主要在,直流电机是一圈圈转动的,舵机只能在一定角度内转动,不能一圈圈转(数字舵机可以在舵机模式和电机模式中切换,没有这个问题)。普通直流电机无法反馈转动的角度信息,而舵机可以。用途也不同,普通直流电机一般是整圈转动做动力用,舵机是控制某物体转动一定角度用(比如机器人的关节)。
本文首先介绍了舵机构造,其次介绍了舵机信号线怎么区分以及它的作用,最后介绍了舵机的规格和选型,具体的跟随小编来详细的了解下。
舵机构造
舵机主要是由外壳、电路板、驱动马达、减速器与位置检测元件所构成。其工作原理是由接收机发出讯号给舵机,经由电路板上的 IC驱动无核心马达开始转动,透过减速齿轮将动力传至摆臂,同时由位置检测器送回讯号,判断是否已经到达定位。位置检测器其实就是可变电阻,当舵机转动时电阻值也会随之改变,藉由检测电阻值便可知转动的角度。
一般的伺服马达是将细铜线缠绕在三极转子上,当电流流经线圈时便会产生磁场,与转子外围的磁铁产生排斥作用,进而产生转动的作用力。依据物理学原理,物体的转动惯量与质量成正比,因此要转动质量愈大的物体,所需的作用力也愈大。舵机为求转速快、耗电小,于是将细铜线缠绕成极薄的中空圆柱体,形成一个重量极轻的无极中空转子,并将磁铁置於圆柱体内,这就是空心杯马达。
为了适合不同的工作环境,有防水及防尘设计的舵机;并且因应不同的负载需求,舵机的齿轮有塑胶及金属之区分,金属齿轮的舵机一般皆为大扭力及高速型,具有齿轮不会因负载过大而崩牙的优点。较高级的舵机会装置滚珠轴承,使得转动时能更轻快精准。滚珠轴承有一颗及二颗的区别,当然是二颗的比较好。目前新推出的 FET 舵机,主要是采用 FET(Field Effect Transistor)场效电晶体。FET 具有内阻低的优点,因此电流损耗比一般电晶体少。
舵机信号线怎么区分

信号线接单片机I/0 口,由于舵机内部有驱动电路,所以可以直接用普通的单片机I/0 口直接控制;
电源正极,接输入电源的正极;
地线,接输入电源的负极;
备注:如果控制部分和电源部分是分开的,两者一定要共地。
舵机的信号线有什么用
舵机都是用信号线的颜色来区分功能的,中间的红色线是电源正极,棕色线是电源负极,剩下的橙色线是控制线。
舵机的规格和选型
当今使用的舵机有模拟舵机和数字舵机之分(具体差别见第节),不过数字舵机还是相对较少。下面的技术规格同时适用与两种舵机。
舵机的规格主要有几个方面:转速、转矩、电压、尺寸、重量、材料等。我们在做舵机的选型时要对以上几个方面进行综合考虑。
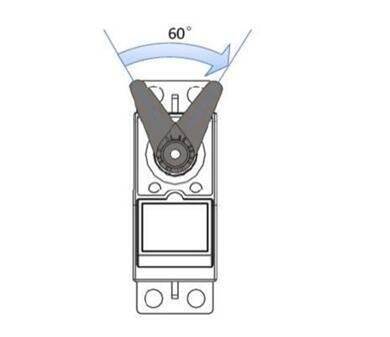
转速:
转速由舵机无负载的情况下转过60。角所需时间来衡量,常见舵机的速度一般在0.11/60‘~0.21S/60^之间。
转矩
舵机扭矩的单位是KG.CM,这是一个扭矩单位。可以理解为在舵盘上距舵机轴心水平距离1CM处,舵机能够带动的物体重量。

电压:
厂商提供的速度、转矩数据和测试电压有关,在4.8V和6V两种测试电压下这两个参数有比较大的差别。如Futaba S-9001在4.8V 时扭力为3.9kg、速度为0.22 秒,在6 0V 时扭力为5.2kg、速度为0.18 秒。若无特别注明,JR 的舵机都是以4.8V 为测试电压,Futaba 则是以6.0V 作为测试电压。
舵机的工作电压对性能有重大的影响,舵机推荐的电压一般都是4.8V 或6V。当然,有的舵机可以在7V 以上工作,比如12V的舵机也不少。较高的电压可以提高电机的速度和扭矩。选择舵机还需要看我们的控制卡所能提供的电压。
尺寸、重量和材质:
舵机的功率(速度X转矩) 和舵机的尺寸比值可以理解为该舵机的功率密度,一般同样品牌的舵机,功率密度大的价格高。
塑料齿轮的舵机在超出极限负荷的条件下使用可能会崩齿,金属齿轮的舵机则可能会电机过热损毁或外壳变形。所以材质的选择并没有绝对的倾向,关键是将舵机使用在设计规格之内。
用户一般都对金属制的物品比较信赖,齿轮箱期望选择全金属的,舵盘期望选择金属舵盘。但需要注意的是,金属齿轮箱在长时间过载下也不会损毁,最后确是电机过热损坏或外壳变形,而这样的损坏是致命的,不可修复的。塑料出轴的舵机如果使用金属舵盘是很危险的,舵盘和舵机轴在相互扭转过程中,金属舵盘不会磨损,舵机轴会在一段时间后变得光秃,导致舵机完全不能使用。
综上,选择舵机需要在计算自己所需扭矩和速度,并确定使用电压的条件下,选择有150%左右甚至更大扭矩富余的舵机。
精彩阅读推荐:
-
信号线
+关注
关注
2文章
181浏览量
21815 -
舵机
+关注
关注
17文章
292浏览量
41575
发布评论请先 登录
相关推荐
机器人舵机的作用
在布多层板时,重要的信号线怎么区分出来?
舵机有哪几根线 有何用
信号线的作用及种类介绍
信号线是什么线
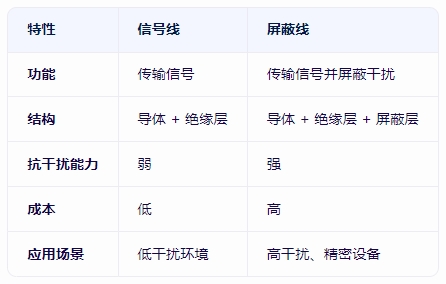
信号线和光纤线的区别是什么
信号线和屏蔽线有什么区别





 工商网监
工商网监
评论