 舵机是由什么组成_舵机的结构及原理
舵机是由什么组成_舵机的结构及原理
舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。目前,在高档遥控玩具,如飞机、潜艇模型,遥控机器人中已经得到了普遍应用。本文首先介绍了舵机的组成及结构原理,其次介绍了舵机的控制及追随性,最后介绍了舵机接线方法(三线接线法)以及安装。
舵机是由什么组成
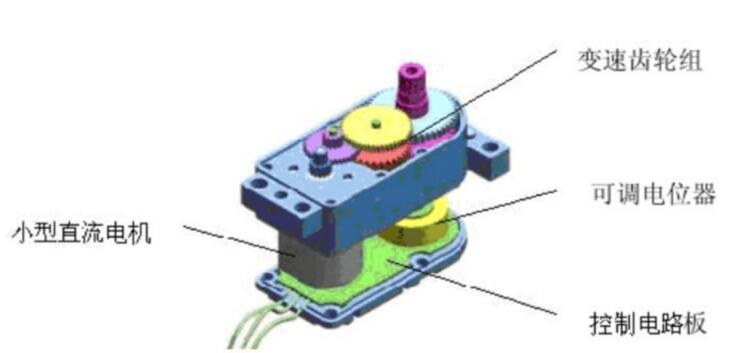
一般来讲舵机主要由以下几个部分组成,舵盘、减速齿轮组、位置反馈电位计、直流电机、控制电路等,如图4、图5所示。
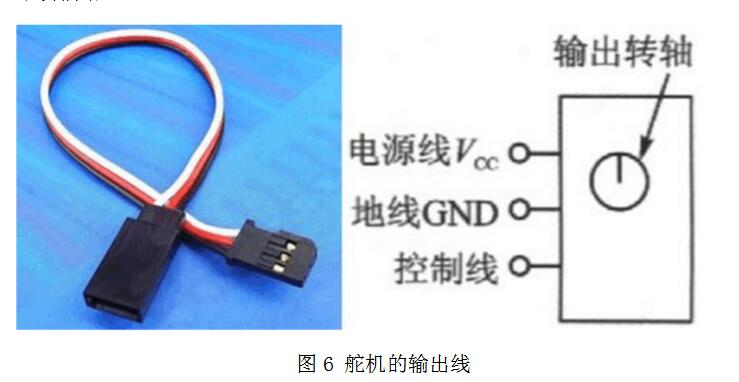
舵机的输入线共有三条,如图6所示,红色中间,是电源线,一边黑色的是地线,这辆根线给舵机提供最基本的能源保证,主要是电机的转动消耗。电源有两种规格,一是4.8V,一是6.0V, 分别对应不同的转矩标准,即输出力矩不同,6. OV对应的要大一些,具体看应用条件;另外一根线是控制信号线,Futaba 的一般为白色,JR的一般为桔黄色。另外要注意一点,SANWA的某些型号的舵机引线电源线在边上而不是中间,需要辨认。但记住红色为电源,黑色为地线,一般不会搞错。
舵机的结构及原理
舵机安装了一个电位器(或其它角度传感器)检测输出轴转动角度,控制板根据电位器的信息能比较精确的控制和保持输出轴的角度。这样的直流电机控制方式叫闭环控制,所以舵机更准确的说是伺服马达,英文 servo.舵机组成: 舵盘、 减速齿轮、 位置反馈电位计、直流电机、 控制电路板等。
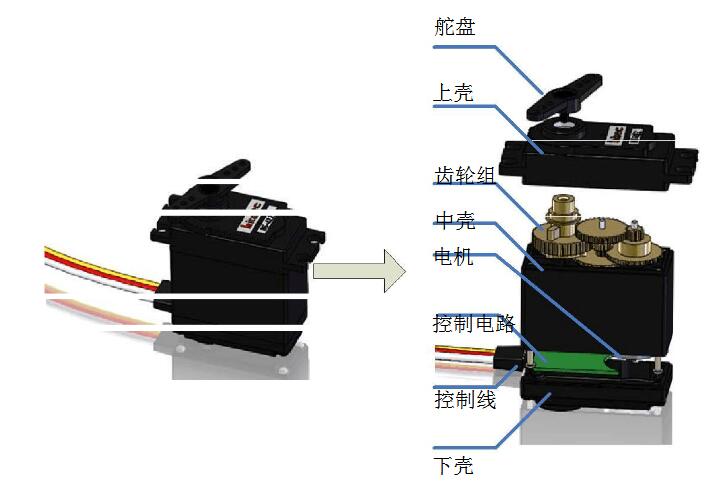
控制电路板接受来自信号线的控制信号,控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。舵机的输出轴和位置反馈电位计是相连的,舵盘转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进行反馈,然后控制电路板根据所在位置决定电机转动的方向和速度,从而达到目标停止。
其工作流程为:控制信号→控制电路板→电机转动→齿轮组减速→舵盘转动→位置反馈电位计→控制电路板反馈。
舵机的控制及追随性
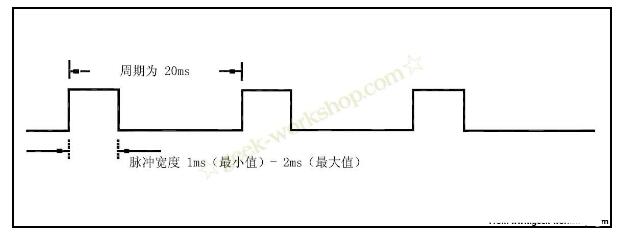
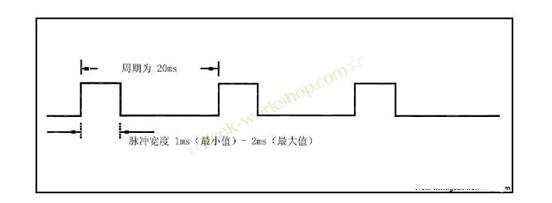
舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms-2.5ms范围内的角度控制脉冲部分,总间隔为2ms。以180度角度伺服为例,那么对应的控制关系是这样的:
0.5ms--------------0度;
1.0ms------------45度;
1.5ms------------90度;
2.0ms-----------135度;
2.5ms-----------180度;
舵机的追随特性
假设现在舵机稳定在A点,这时候CPU发出一个PWM信号,舵机全速由A点转向B点,在这个过程中需要一段时间,舵机才能运动到B点。
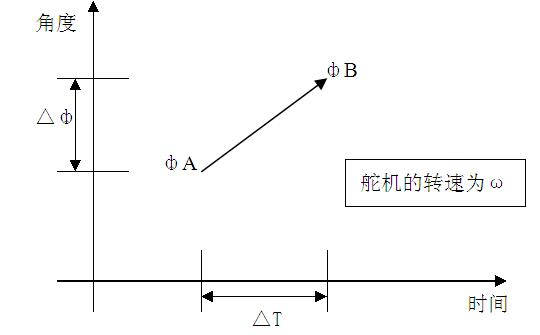
保持时间为Tw
当Tw≥△T时,舵机能够到达目标,并有剩余时间;
当Tw≤△T时,舵机不能到达目标;
理论上:当Tw=△T时,系统最连贯,而且舵机运动的最快。
实际过程中w不尽相同,连贯运动时的极限△T比较难以计算出来。
假如我们的舵机1DIV =8us,当PWM信号以最小变化量即(1DIV=8us)依次变化时,舵机的分辨率最高,但是速度会减慢。
舵机接线方法(三线接线法)
(1)黑线(地线)
红线(电源线)两个标准:4.8V和6V蓝线/黄线(信号线)
(2)棕线(地线)
红线(电源线)两个标准:4.8V和黄线(信号线)
舵机的性能及安装
舵机是遥控模型无线电操纵系统中很重要的部件。如果不了解它的性能,不讲究正确的安装方法,轻则影响模型的飞行姿态,重则如果卡住模型则无法操纵,造成事故的发生。所以,在使用舵机前,了解它的性能和安装方法是必要的。
日前市场上出售的模型舵机,主要是比例式的,类型有普通型、超小型,强力型和特殊用途型等几种。下面分别介绍一下它们各自的性能。
普通型:
45克,0.2秒/60度,力矩3千克·厘米。这种舵机各方面性能都比较适中,一般用在尺寸不是很大的P3A-1、2和P2B-1、2等模型上。
超小型:
20克,0.15秒/60度,力矩2千克·厘米。它的体积小、重量轻,输出力矩小,通常用于小尺寸、舵面阻力相对小的模型上,如P5A、小型电动类模型等。
强力型:
100克,0.2秒/60度,力矩9千克·厘米。这种舵机输出力矩大,可以克服高速、大舵面带来的阻力大的缺点。主要用于尺寸和飞行重量大,速度快,舵面阻力大的模型,如F3A、大型仿真飞机模型、现代特技飞机模型、喷射模型飞机和F4级模型等。
特殊用途型:
多数特殊用途的舵机,其性能与强力型相似。通常用于专项任务,如收索机(帆船)、起落架蛇机等。另外,还有—些耐高温和可防水的舵机,主要用于科学研究和工业方面,一般模型很少采用,但近年来这种舵机随着模型产品的发展在民用模型领域发展迅速。
—般的舵机内部的电路和齿轮等零什都是很精细的,自己较难制作,多采用成品舵机。日产成品舵机品质较好,剩余功率大,不易打齿、比较耐用。国产舵机质量有的也不错。安装舵机也很重要,安装方法主要有三种:
(1)用胶直接把舵机粘在模型上。要求帖接技术较高,不能更换, 通常用于一些简单模型。
(2)对好舵机两边的安装孔,用螺钉固定。这种方法的好处是容易更换。
(3)利用配套的固定片及减震片固定。对丁装大容积内燃机的模型,为了减少振动对舵机的损害,多采用这种方法。
舵机的安装位置应尽量靠近模型的重心。有条件时,舵机和接收机应尽量分别使用电源。电源电压不足时,应立即更换,以免舵机操纵失灵导致空中停机。舵机输出盘(摇臂)不同的角度和力臂孔,应尽量选择力臂大的,这样可以减小舵机负荷。输出盘与舵面,可以专用联杆或钢丝连接,前者效果较好
最后说明一下,对于—些电动模型的动力电机控制,原来用一个舵机作开关,但作用不大,后来有些人用直接粘一个电位器的办法来对电机进行无级操纵。现在,有些厂家已生产出成品的无级变速器(现在叫电调), 直接插在一个通道中,对电机进行加、减速等无级控制,既轻巧,又经济。不过,为了考虑车、船模使用,变速器有顺、逆转功能,而在航模上只允许用顺转功能。因此,用在航模上时,最好请专人对它的电路进行一下改装,防止操纵失误。变速器最好单用一组动力电源,如果同时使用接枚机电源,将会影响接收机的工作和舵机的动作
精彩阅读推荐:
-
舵机
+关注
关注
17文章
269浏览量
41023
发布评论请先 登录
相关推荐
舵机的基本结构和原理,如何通过PWM信号控制舵机
舵机的概念、结构以及类型概念
舵机控制原理是什么_舵机的控制方法
数字舵机控制原理是什么_数字舵机与模拟舵机的区别
舵机的基本结构和原理,以及如何通过PWM信号控制舵机
舵机详解

舵机是什么?舵机内部结构解析





 工商网监
工商网监
评论