 基于PLC的机器人伺服运动控制系统设计详解
基于PLC的机器人伺服运动控制系统设计详解
本文通过对机器人移动功能的研制和开发,为适应各种工作环境的不同要求而开发出各种移动机构。其中全方位轮可以实现高精确定位、原地调整姿态和二维平面上任意连续轨迹的运动,具有一般的轮式移动机构无法取代的独特特性,对于研究移动机器人的自由行走具有重要愈义。综合分析了现有移动机器人的移动机构,移动运动特点,分析了其运动学特征;提出了移动机器人静态步行的稳定性判定方法,规划了机器人直线行走步态、定点转弯步态,以及跨越障碍物的行走步态;并采用PLC实现对步态的控制。
本文首先介绍了伺服运动控制系统主要特点,其次介绍了伺服运动控制系统工作原理,最后从机器人移动方式的选择与结构设计、移动机器人运动控制系统及机器人的控制系统设计三个方面来详细介绍机器人伺服运动控制系统设计,具体的跟随小编一起来了解一下。
伺服运动控制系统主要特点
(1)精确的检测装置:以组成速度和位置闭环控制。
(2)有多种反馈比较原理与方法:根据检测装置实现信息反馈的原理不同,伺服系统反馈比较的方法也不相同。目前常用的有脉冲比较、相位比较和幅值比较3种。
(3)高性能的伺服电动机(简称伺服电机):用于高效和复杂型面加工的数控机床,伺服系统将经常处于频繁的启动和制动过程中。要求电机的输出力矩与转动惯量的比值大,以产生足够大的加速或制动力矩。要求伺服电机在低速时有足够大的输出力矩且运转平稳,以便在与机械运动部分连接中尽量减少中间环节。
(4)宽调速范围的速度调节系统,即速度伺服系统:从系统的控制结构看,数控机床的位置闭环系统可看作是位置调节为外环、速度调节为内环的双闭环自动控制系统,其内部的实际工作过程是把位置控制输入转换成相应的速度给定信号后,再通过调速系统驱动伺服电机,实现实际位移。数控机床的主运动要求调速性能也比较高,因此要求伺服系统为高性能的宽调速系统。
伺服运动控制系统工作原理
伺服控制系统实际上是一种对机械工作过程实现精细化控制的反馈控制系统,多用于对机械的运动矢量进行控制。伺服控制系统按所用驱动元件的类型可分为液压伺服系统、气动伺服系统和机电伺服系统。前两者特色明显,但应用范围有一定的限制。而机电伺服系统的能源是可以用最方便最灵活的方式加以利用的电能,其驱动元件是可按各种特定需求设计和选用的电动机,可以达到最为优异的系统性能,因此成为应用最为广泛的伺服系统。
机电伺服控制系统以电动机为控制对象,以控制器为核心,以电力电子功率变换装置为执行机构,在自动控制理论的指导下组成的电气传动自动控制系统。这类系统控制电动机的转矩、转速和转角,将电能转换为机械能,实现机械的运动要求。根据电机带动负载的不同,伺服系统可以应用在国防、工业、民用等众多场合,如:国防领域的雷达扫描器、光电跟踪随动器、火控系统、测控系统及用于半实物仿真的高精度转台、舵机负载模拟器等;工业领域的自动化产线、机床、机械臂、监控设备转台等。
基于PLC的机器人伺服运动控制系统设计详解
一、机器人移动方式的选择与结构设计
1、移动方式的选择
现在主流的移动方式基本是轮式、腿式和履带式,但由于其各有各的优点与缺点,现在的科学家越来越追求综合性能的提高。轮式移动机构具有运动速度快、能量利用率高、结构简单、控制方便和能借鉴至今已很成熟的汽车技术等优点,只是越野性能不太强。而腿式移动结构虽然有很好的越野能力,但是结构复杂,效率低等缺点。对于履带式主要是由于沉重的履带和繁多的驱动轮使得整体机构笨重,消耗的功率也相对较大。
针对本次设计的环境主要是人为环境,地势较平坦,但也需要对台阶、楼梯等障碍物进行考虑,所以我打算设计轮腿结合式的移动方式,在平坦的道路利用轮式结构效率高,迅速等优点,在需要上台阶,上楼梯等地方采用腿式结构进行越障。由于机器人中含腿式结构且需要上台阶和爬楼梯所以采用四腿结构,这是因为虽然对于台阶就算是轮式结构也能满足要求,但是对于爬楼梯轮式结构就不行了,所以需要腿式结构的存在,生活中楼梯随处可见,如果要使机器人有较好的环境适应能力,上楼梯是必须要克服的。我决定选择四轮腿式结构,而基本结构如图1。中间为机器人主体,里面有机器人的控制系统和驱动上肢转动的电机,四肢末端为轮胎,机器人每条腿都分为上肢和下肢,中间为关节,下肢可绕其转动。
图1 机器人基本结构
2、机器人移动原理构想
由于环境较好,基本属于平坦地面,故主要移动方式为轮式移动,在需要上台阶或楼梯是才使用腿式结构,这是因为腿式结构效率较低,只在必须使用腿式结构的时候才使用,这样既能提高机器人的移动效率,也能是机器人有较好的越障能力。对于上台阶与爬楼梯的原理基本相同,故我只说明我对爬楼梯的移动原理的构想。
首先是要在机器人机身上安装传感器,使其能够感应到前面的障碍物楼梯,然后就是爬楼梯的过程。在准备爬楼梯的时候,首先要把轮子上的刹车系统启动,是轮子不能转动。然后爬楼梯的过程如同人走楼梯一样,先轮流上前脚,等前脚站稳,再轮流上后脚。
3、机器人轮子的选择
现在市面上的轮子有很多,有标准轮,小脚轮,麦克纳姆轮,球形轮,正交轮等。我决定选用麦克纳姆轮,因为它能很好的向各个方向移动且没有球形轮那么难控制,而且现在麦克纳姆轮的制作也比较成熟。
麦克纳姆外形像一个斜齿轮,轮齿是能够转动的鼓形辊子,辊子的轴线与轮的轴线成α角度。这样的特殊结构使得轮体具备了三个自由度:绕轮轴的转动和沿辊子轴线垂线方向的平动和绕辊子与地面接触点的转动。这样,驱动轮在一个方向上具有主动驱动能力的同时,另外一个方向也具有自由移动(被动移动)的运动特性。轮子的圆周不是由普通的轮胎组成,而是分布了许多小滚筒,这些滚筒的轴线与轮子的圆周相切,并且滚筒能自由旋转。当电机驱动车轮旋转时,车轮以普通方式沿着垂直于驱动轴的方向前进,同时车轮周边的辊子沿着其各自的轴线自由旋转。
采用全方位移动机构的车轮组合情况,轮中的小斜线表示触地辊子的轴线方向。每个全方位轮都由一台直流电机独立驱动,通过四个全方位轮的转速转向适当组合,可以实现机器人在平面上三自由度的全方位移动。4个全方位轮组成的机器人底座的力分析如图,其中为轮子滚动时小辊子受到轴向的摩擦力;为小辊子做从动滚动时受到的滚动摩擦力;ω为各轮转动的角速度。
4、机器人腿部结构的设计
设计的腿部分为上肢和下肢两个部分,上肢连接着机器人的主体和下肢,下肢连接着轮胎,由于要使机器人腿能够满足运动要求,所以还需在上肢与机器人主体连接处设计一个关节,一个使腿部结构能在机器人侧面平面旋转360度。而且由于要控制转动和其转动的角度故需要在上肢与下肢关节处安装小型电机,所以要留出空间安装电机和线路。
如图2所示,上肢上部分有一个孔与一根轴,轴是与主体内电机通过联轴器相连,从而来控制上肢绕主体的转动,孔与下部分的竖直孔用来通过电线,最下面两孔是用来和下肢相连。总长约70厘米,宽度约16厘米。
图2 上肢与下肢UG3维结构图
二、移动机器人运动控制系统
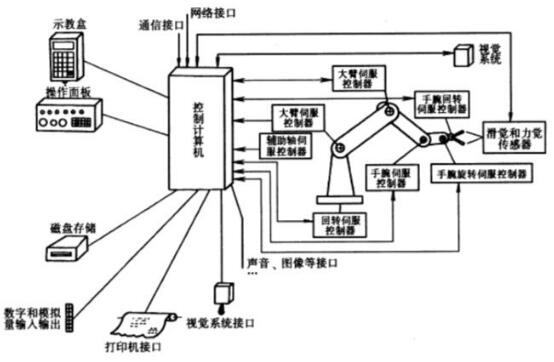
移动机器人的运动控制系统是机器人系统的执行机构,对系统精确地完成各项任务起着重要作用,有时也可作为一个简单的控制器。构成机器人运动控制系统的要素有:计算机硬件系统及控制软件、输入/输出设备、驱动器、传感器系统,它们之间的关系如图3所示
移动机器人运动控制系统的设计主要包括系统的功能和体系结构设计,功能设计主要完成控制功能和算法的软件设计,而体系结构设计是功能在硬件上的实现。根据面向的任务和环境不同,对移动机器人运动控制系统的设计也不同。目前机器人运动控制系统存在主要问题有:系统局限于专用微处理器、专用机器人语言,开放性差;软件结构依赖于微处理器硬件,难以在不同系统间移植;扩展性差。针对这些不足,进行机器人运动控制系统设计时应考虑以下要求:
(1)开放式系统结构。采用开放式软件、硬件结构,可以根据需要方便扩充功能,使其适用于不同目的的科研需求;
(2)合理的模块化设计。硬件根据系统要求和电气特性进行模块化设计,不仅方便安装和维护,而且提高系统的可靠性;软件按功能分成不同模块,便于修改、添加;
(3)实时性、多任务要求。控制器必须能在确定时间内完成对外部中断的处理,并且可以多个任务同时进行;
(4)网络通信功能,便于资源共享和多机器人协同;
(5)具有一定智能,能根据实际情况判断和决策,如给定速度突变或在合理范围之外时的处理、对故障的自动诊断等。
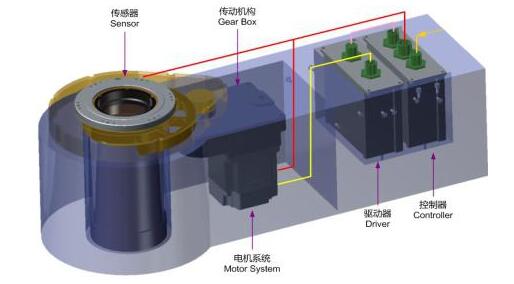
1、机器人的驱动系统
目前,机器人的运动控制中较为常见的有直流电机、步进电机和舵机。对于我的课题来说,一个能控制速度的电机作为麦克纳姆轮使用,也需要一个能精确可控制角度且可以保持的电机作为腿部关节使用。经过我初步估计电机转速不是很大,如果使用直流电机,由于转速和力矩的影响,需配置减速器,且不能控制角度。而如果使用步进电机,需配置驱动器。为满足系统的控制要求,考虑到经济性等,我准备采用Dynamixel系列AX-12舵机它是机器人专用的伺服电机。它不但能精确控制角度,作为关节角度控制;也可以通过软件设置为无限旋转模式,作为车轮使用。
舵机是一种位置伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。其工作原理是:控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20mS,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。AX-12舵机是一款智能化、模块化的动力装置,主要由一个微处理器、一个精确的直流电机、齿轮减速器、位置传感器、温度传感器以及具备通讯功能的控制芯片等组成。
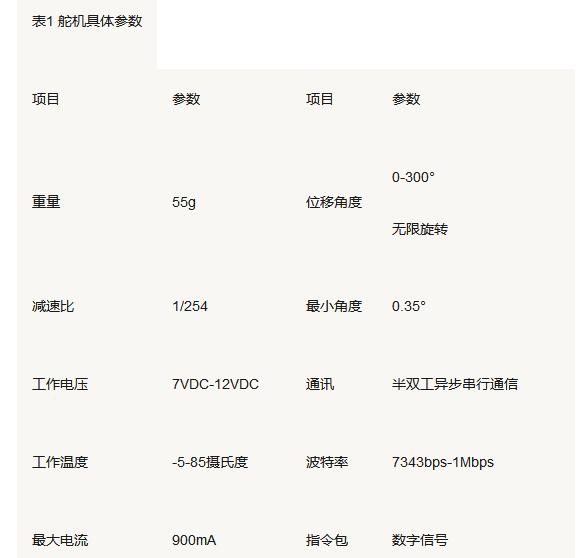
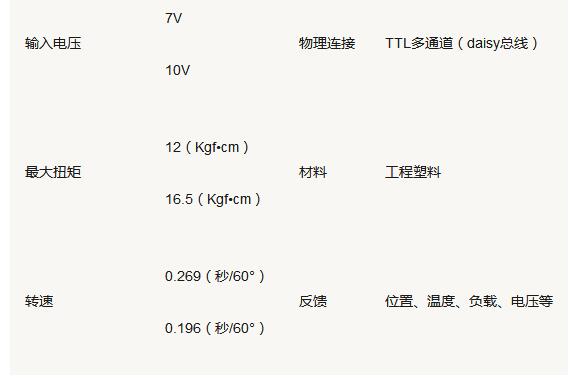
由于AX-12内部配有一个ATmega8微处理器,用来接收控制器发送的数据包,通过相应的处理后给伺服电机发送PWM信号来控制电机的起停。因此,控制舵机实际上是去控制ATmega8舵机的状态和参数都存储在ATmega8的RAM和EEPROM相应的地址里,对舵机进行控制也就是对舵机的相应地址读和写数据的过程。如表1所示为舵机的具体参数。
2、机器人的感知系统
环境感知能力是移动机器人除了移动之外最为基本的一种能力,感知能力的高低直接决定了机器人的智能性。}fU感知能力是由感知系统决定的,感知系统是机器人与环境、人实现交互的重要I/O工具,是机器人获取信息的窗口。移动机器人之所以能在已知或未知的环境中面向目标自主运动,完成一定的作业功能,是因为它能够通过多传感器感知外部环境信息和自身状态。
移动机器人的传感器可分为内部和外部两类传感器。内部传感器用来检测机器人本身的状态,是完成机器人运动所必须的那些传感器,如位置、速度传感器等,它们是构成机器人不可缺少的基本原件之一。外部传感器用来检测机器人所处环境及状况的传感器,取决于机器人所要完成的任务,如视觉传感器、超声波传感器、红外传感器、声音传感器等。机器人用这些传感器采集各种信息,然后采取适当的方法,将多个传感器获取的环境信息加以综合处理,控制机器人进行智能作业。
本设计中除了采用AX-12舵机中自带的位置、速度、温度、供电电压及扭矩等内部传感器外,还采用AX-S1传感器模块作为外部传感器。
3、内部传感器
AX-12舵机不但内置有位置、速度传感器用于检测电机的旋转速度以及舵机的旋转角度,还有内部温度、供电电压以及扭矩等传感器,用于检测舵机内部的状态。当AX-12舵机内部温度、扭矩、供电电压等超过额定范围时,它主动反馈这种情况。此外,它还会闪动LED灯或关闭舵机扭矩来保护自己。
4、外部传感器
Dynamixel系列AX-12传感模块可以说是“麻雀虽小,五脏俱全”,它包含了红外距离传感器、红外遥控器、声音探测传感器、光度探测传感器、温度探测传感器以及还具有蜂鸣器的功能。
三、机器人的控制系统设计
机器人运动过程中的受力情况可能会根据路面情况不断变化,因而电机的负载也在不停的变化,所以要实现对执行元件(腿)的行程的准确控制不能单纯依靠对电机的运转时间进行限定,必须要在执行元件上安装反馈位置的传感器,这样,当执行元件运动到规定的位置时就能通过控制系统给电机一个反馈信号,从实现对电机的控制。
六条腿中1、3、5,2、4、6分别是相同的,所以进行控制设计时只需以1、2两腿的配合为例说明即可,3、5腿与1腿相同,4、6腿与2腿相同。
(1)第1腿的传感器:
在上下摆动的极限位置安装行程开关,上极限B1,下极限A1。在前后摆动的极限位置和中点位置安装行程开关,前极限Z1,后极限X1,中点位置O1。
(2)第2腿的传感器:
在上下摆动的极限位置安装行程开关,上极限B2,下极限A2。在前后摆动的极限位置和中点位置安装行程开关,前极限Z2,后极限X2,中点位置O2。
四、结论
在对移动方式的选择上我首先就选择了麦克纳姆轮,因为麦克纳姆轮工艺已经比较成熟,而且能全方位移动。然后对其原理进行了阐述。接着是机器人的结构的设计。首先设计重要的腿部结构,然后是主体部分,这个过程都是运用UG7.5来完成的。之后对电机类型进行选择,最终因为其优秀的功能选择了舵机。在对控制系统的设计中,最终简单的设计了控制系统的框架,并没有对内部指令等进行编辑。
-
机器人
+关注
关注
211文章
28756浏览量
208953 -
plc
+关注
关注
5019文章
13401浏览量
466006 -
运动控制系统
+关注
关注
0文章
92浏览量
14192
发布评论请先 登录
相关推荐
【MYD-Y6ULX申请】机器人运动控制板(电机控制)项目
基于CAN总线和双传感器仿人机器人运动控制系统的研究
基于PLC的机器人伺服控制系统






 工商网监
工商网监
评论